(EHK OSN) č. 140Předpis Evropské hospodářské komise Organizace spojených národů (EHK OSN) č. 140 – Jednotná ustanovení pro schvalování osobních automobilů z hlediska systémů elektronického řízení stability (ESC) [2018/1592]
| Publikováno: | Úř. věst. L 269, 26.10.2018, s. 17-35 | Druh předpisu: | Nařízení |
| Přijato: | 26. října 2018 | Autor předpisu: | Evropská komise |
| Platnost od: | 29. prosince 2018 | Nabývá účinnosti: | 29. prosince 2018 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
Pouze původní texty EHK OSN mají podle mezinárodního veřejného práva právní účinek. Je zapotřebí ověřit si status a datum vstupu tohoto předpisu v platnost v nejnovější verzi dokumentu EHK OSN o statusu TRANS/WP.29/343, který je k dispozici na internetové adrese:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Předpis Evropské hospodářské komise Organizace spojených národů (EHK OSN) č. 140 – Jednotná ustanovení pro schvalování osobních automobilů z hlediska systémů elektronického řízení stability (ESC) [2018/1592]
Zahrnuje veškerá platná znění až po:
Doplněk 2 k původnímu znění předpisu – datum vstupu v platnost: 29. prosince 2018
OBSAH
PŘEDPIS
|
1. |
Oblast působnosti |
|
2. |
Definice |
|
3. |
Žádost o schválení |
|
4. |
Schválení |
|
5. |
Obecné požadavky |
|
6. |
Funkční požadavky |
|
7. |
Požadavky na vlastnosti |
|
8. |
Zkušební podmínky |
|
9. |
Zkušební postup |
|
10. |
Změna typu vozidla nebo systému ESC a rozšíření schválení |
|
11. |
Shodnost výroby |
|
12. |
Postihy za neshodnost výroby |
|
13. |
Definitivní ukončení výroby |
|
14. |
Názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek a názvy a adresy schvalovacích orgánů |
PŘÍLOHY
|
1. |
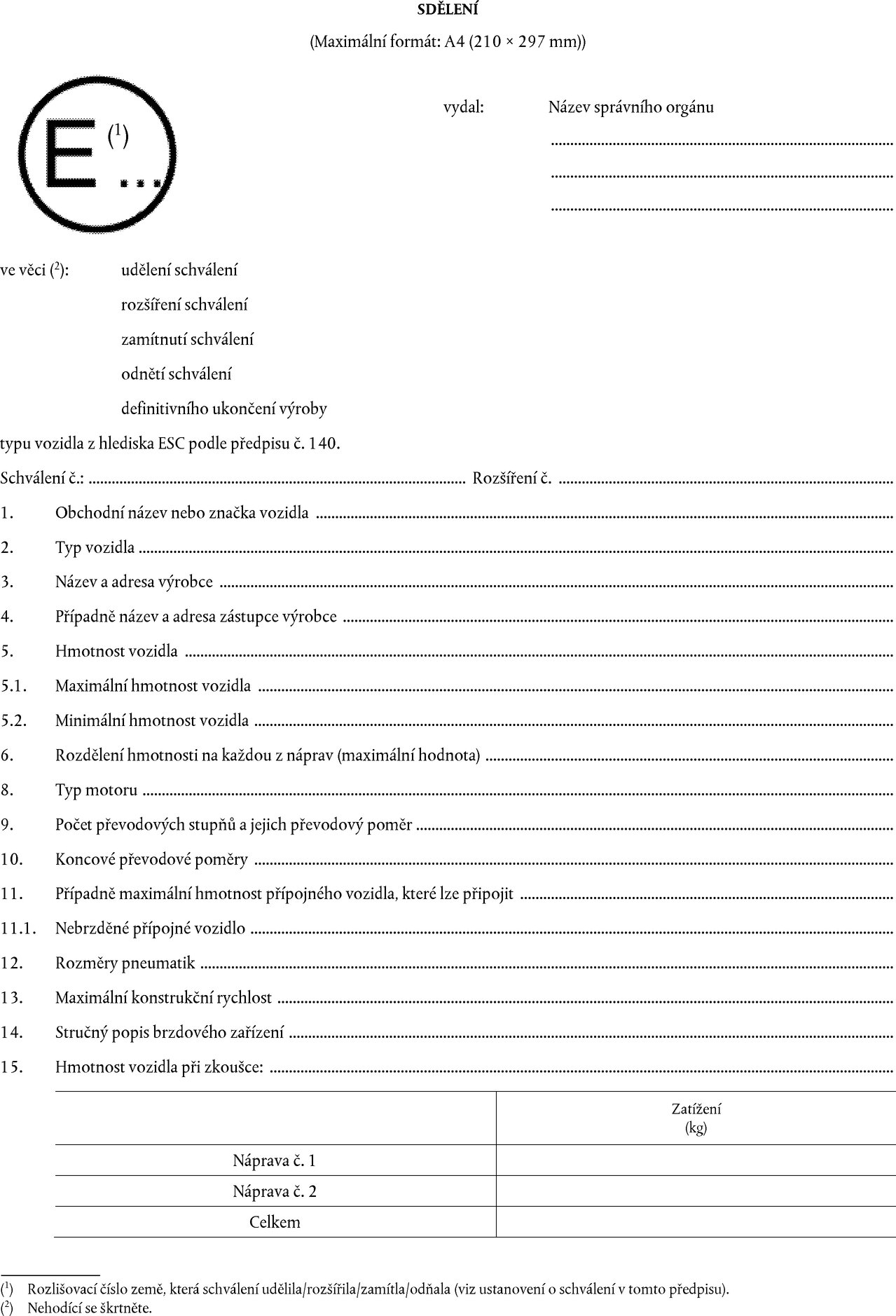
Sdělení |
|
2. |
Uspořádání značek schválení typu |
|
3. |
Použití simulace dynamické stability |
|
4. |
Simulační nástroj dynamické stability a ověření jeho správnosti |
|
5. |
Zkušební protokol k simulačnímu nástroji stabilitní funkce vozidla |
1. OBLAST PŮSOBNOSTI
1.1. Tento předpis se vztahuje na schválení vozidel kategorie M1 a N1 (1) s ohledem na jejich systémy elektronického řízení stability.
1.2. Oblast působnosti tohoto předpisu nezahrnuje:
|
1.2.1. |
vozidla, jejichž konstrukční rychlost nepřesahuje 25 km/h; |
|
1.2.2. |
vozidla uzpůsobená pro řízení osobami se zdravotním postižením. |
2. DEFINICE
Pro účely tohoto předpisu se použijí tyto definice:
|
2.1. |
„Schválením vozidla“ se rozumí schválení typu vozidla z hlediska elektronického řízení stability. |
|
2.2. |
„Typem vozidla“ se rozumí kategorie vozidel, která se neliší v takových zásadních hlediscích, jako jsou:
|
|
2.3. |
„Maximální hmotností“ se rozumí maximální technicky přípustná hmotnost podle prohlášení výrobce (tato hmotnost může být vyšší, než je „maximální přípustná hmotnost“ stanovená vnitrostátním orgánem). |
|
2.4. |
„Rozdělením hmotnosti mezi nápravy“ se rozumí rozdělení působení tíže na hmotnost vozidla a/nebo na jeho náklad mezi nápravy. |
|
2.5. |
„Zatížením kola/nápravy“ se rozumí svislá statická reakce (síla) na povrchu vozovky v místě styku kola/kol nápravy s vozovkou. |
|
2.6. |
„Ackermannovým úhlem řízení“ se rozumí úhel, jehož tangentou je rozvor dělený poloměrem zatáčení při velmi nízké rychlosti. |
|
2.7. |
„Systémem elektronického řízení stability (ESC)“ se rozumí systém, který má všechny tyto vlastnosti:
|
|
2.8. |
„Bočním zrychlením“ se rozumí složka vektoru zrychlení určitého bodu vozidla kolmá na osu x vozidla (podélnou) a rovnoběžnou s rovinou vozovky. |
|
2.9. |
„Přetáčivostí“ se rozumí stav, při kterém je rychlost stáčení vozidla větší než rychlost stáčení, ke které by došlo při rychlosti vozidla dané Ackermannovým úhlem řízení. |
|
2.10. |
„Bočním skluzem nebo úhlem bočního skluzu“ se rozumí arcustangens poměru boční rychlosti k podélné rychlosti těžiště vozidla. |
|
2.11. |
„Nedotáčivostí“ se rozumí stav, při kterém je rychlost stáčení vozidla menší než rychlost stáčení, ke které by došlo při rychlosti vozidla dané Ackermannovým úhlem řízení. |
|
2.12. |
„Rychlostí stáčení“ se rozumí rychlost změny směrového úhlu vozidla měřená ve stupních za sekundu rotace okolo svislé osy procházející těžištěm vozidla. |
|
2.13. |
„Maximálním brzdným koeficientem“ se rozumí koeficient tření mezi pneumatikou a povrchem vozovky změřený při maximálním zpomalení odvalující se pneumatiky. |
|
2.14. |
„Společnou zobrazovací plochou“ se rozumí plocha, na které se může zobrazit více než jeden sdělovač, indikátor, identifikační symbol nebo jiná zpráva, avšak nikoliv současně. |
|
2.15. |
„Faktorem statické stability“ se rozumí polovina rozchodu vozidla dělená výškou jeho těžiště, což lze vyjádřit jako SSF = T/2H, kde: T = rozchod (u vozidel s více než jedním rozchodem se použije střední hodnota; u vozidel s dvojitou montáží kol se použijí k výpočtu hodnoty T vnější kola) a H = výška těžiště vozidla. |
3. ŽÁDOST O SCHVÁLENÍ
3.1. Žádost o schválení typu vozidla z hlediska ESC předkládá výrobce vozidla nebo jeho řádně pověřený zástupce.
3.2. K žádosti musí být přiloženy níže uvedené dokumenty ve trojím vyhotovení a tyto náležitosti:
|
3.2.1. |
popis typu vozidla podle položek uvedených výše v bodě 2.2. Musí být uvedena čísla a/nebo symboly identifikující typ vozidla a typ motoru; |
|
3.2.2. |
seznam řádně identifikovaných konstrukčních částí, které tvoří systém ESC; |
|
3.2.3. |
schéma úplného systému ESC s vyznačením polohy jeho konstrukčních částí na vozidle; |
|
3.2.4. |
podrobné výkresy každé konstrukční části, které umožní snadno zjistit její polohu a druh. |
3.3. Technické zkušebně provádějící schvalovací zkoušky se dodá vozidlo, jež představuje typ vozidla, který má být schválen.
4. SCHVÁLENÍ
4.1. Schválení se udělí, pokud typ vozidla předaný ke schválení podle tohoto předpisu splňuje požadavky bodů 5, 6 a 7 níže.
4.2. Každému schvalovanému typu se přidělí číslo schválení, jehož první dvě číslice udávají sérii změn, které zahrnují nejnovější podstatné technické změny daného předpisu v době udělení schválení. Táž smluvní strana nesmí udělit totéž číslo jinému typu vozidla, pokud jde o elektronické řízení stability.
4.3. Schválení nebo zamítnutí schválení typu vozidla podle tohoto předpisu se oznámí smluvním stranám dohody, které používají tento předpis, a to prostřednictvím formuláře podle vzoru v příloze 1 tohoto předpisu a souhrnu informací obsažených v dokumentech uvedených v bodech 3.2.1 až 3.2.4, přičemž výkresy dodané žadatelem o schválení musí mít formát maximálně A4 (210 × 297 mm) nebo musí být na tento formát složeny a být ve vhodném měřítku.
4.4. Na každém vozidle, které vyhovuje typu vozidla schválenému podle tohoto předpisu, se viditelně a na snadno přístupném místě uvedeném ve formuláři schválení umístí mezinárodní značka schválení, která se skládá z:
|
4.4.1. |
kružnice kolem písmene „E“, za nímž následuje rozlišovací číslo země, která schválení udělila (3), a |
|
4.4.2. |
čísla tohoto předpisu, za nímž následuje písmeno „R“, pomlčka a číslo schválení typu vpravo od kružnice předepsané v bodě 4.4.1. |
4.5. Vyhovuje-li vozidlo typu vozidla schválenému podle jednoho nebo více dalších předpisů připojených k dohodě v zemi, která udělila schválení podle tohoto předpisu, není třeba symbol předepsaný v bodě 4.4.1 výše opakovat; v takovém případě se další čísla a symboly všech předpisů, podle kterých bylo uděleno schválení v zemi, která udělila schválení podle tohoto předpisu, umístí ve svislých sloupcích vpravo od symbolu předepsaného v bodě 4.4.1.
4.6. Značka schválení musí být jasně čitelná a nesmazatelná.
4.7. Značka schválení musí být umístěna blízko štítku, na němž jsou uvedeny údaje o vozidle, nebo na tomto štítku.
4.8. V příloze 1 tohoto předpisu jsou uvedeny příklady uspořádání značky schválení typu.
5. OBECNÉ POŽADAVKY
5.1. Vozidla musí být vybavena systémem ESC splňujícím funkční požadavky specifikované v bodě 6 a požadavky na vlastnosti podle bodu 7, zkušební postupy specifikované v bodě 9 a zkušební podmínky specifikované v bodě 8 tohoto předpisu.
5.1.1. Alternativně k požadavkům uvedeným v bodě 5.1 mohou být vozidla kategorií M1 a N1 s provozní hmotností vyšší než 1 735 kg vybavena stabilizační funkcí vozidla, která zahrnuje opatření proti převrácení a směrové řízení a splňuje technické požadavky a přechodná ustanovení přílohy 21 předpisu č. 13. Tato vozidla nemusí splňovat funkční požadavky specifikované v bodě 6 a požadavky na vlastnosti specifikované v bodě 7, zkušební postupy specifikované v bodě 9 a zkušební podmínky specifikované v bodě 8 tohoto předpisu.
5.2. Systém ESC musí být konstruován, vyroben a namontován takovým způsobem, aby za běžných provozních podmínek mohlo vozidlo vyhovět ustanovením tohoto předpisu, a to i při vibracích, kterým může být vystaveno.
5.3. Systém ESC musí být zejména konstruován, vyroben a namontován tak, aby odolával korozi a stárnutí, kterým je vystaven.
5.4. Účinnost systému ESC nesmí být nepříznivě ovlivňována působením magnetických nebo elektrických polí. To je nutno prokázat splněním technických požadavků a přechodných ustanovení předpisu č. 10 uplatněním:
|
a) |
série změn 03 pro vozidla bez propojovacího systému pro nabíjení dobíjecího systému pro uchovávání energie (trakční baterie); |
|
b) |
série změn 04 pro vozidla s propojovacím systémem pro nabíjení dobíjecího systému pro uchovávání energie (trakční baterie). |
5.5. Posouzení bezpečnostních hledisek systému ESC, pokud jde o jeho přímý vliv na brzdový systém, se zahrne do všeobecného posouzení bezpečnosti brzdového systému, jak je specifikováno v požadavcích předpisu č. 13-H souvisejících s komplexními elektronickými řídícími systémy. Tento požadavek se považuje za splněný předložením certifikátu podle předpisu č. 13-H, který zahrnuje systém ESC, jenž má bý schválen.
5.6. Ustanovení pro periodické technické prohlídky systémů ESC
5.6.1. Při pravidelné technické prohlídce musí být možné potvrdit správný stav fungování vizuálním pozorováním výstražných signálů následujících po spuštění motoru.
5.6.2. V době schválení musí být předána důvěrná informace o zavedených prostředcích ochrany proti jednoduché neoprávněné změně funkce výstražných signálů. Alternativně je tento požadavek na ochranu splněn tím, že existuje další prostředek ke kontrole správného stavu fungování.
6. FUNKČNÍ POŽADAVKY
Každé vozidlo předané ke schválení podle tohoto předpisu musí být vybaveno systémem elektronického řízení stability (ESC), který:
6.1. je schopen používat brzdné momenty individuálně na každém ze čtyř kol (4) a má řídicí algoritmus, který umožňuje tuto funkci vykonávat;
6.2. je schopen pracovat v celém rozsahu rychlostí vozidla, v průběhu všech fází jízdy, včetně zrychlení, volného dojezdu a zpomalení (včetně brzdění), s výjimkou těchto případů:
|
6.2.1. |
když řidič vyřadí ESC z činnosti; |
|
6.2.2. |
když je rychlost vozidla nižší než 20 km/h; |
|
6.2.3. |
v průběhu počátečního autodiagnostického ověření při startu a kontrol správné činnosti, které nesmí trvat déle než dvě minuty za jízdy, v podmínkách podle bodu 9.10.2; |
|
6.2.4. |
když vozidlo jede dozadu. |
6.3. zůstává schopen činnosti, i když je v činnosti protiblokovací brzdový systém nebo systém regulace trakce.
7. POŽADAVKY NA VLASTNOSTI
V průběhu každé zkoušky provedené za zkušebních podmínek podle bodu 8 a zkušebním postupem podle bodu 9.9 musí vozidlo se systémem ESC v činnosti splňovat kritéria směrové stability podle bodů 7.1 a 7.2 a musí splňovat kritérium odezvy podle bodu 7.3 v průběhu každé z těchto zkoušek vykonávaných s naprogramovaným úhlem natočení volantu (5) o hodnotě 5 A nebo větším, avšak s omezením podle ustanovení bodu 9.9.4, přičemž A je úhel natočení volantu vypočtený podle bodu 9.6.1.
Pokud bylo vozidlo fyzicky zkoušeno podle bodu 8, lze prokázat vyhovění verzí nebo variant téhož typu vozidla počítačovou simulací, která zahrnuje zkušební podmínky podle bodu 8 a zkušební postup podle bodu 9.9. Použití simulátoru je vymezeno v příloze 4 tohoto předpisu.
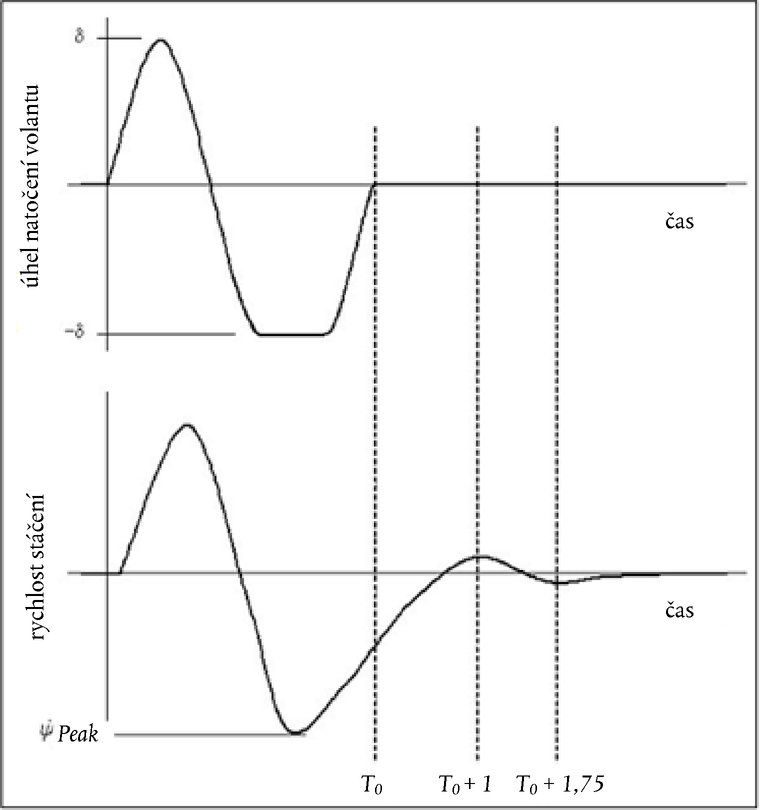
7.1. Rychlost stáčení měřená po jedné sekundě po vykonání sinusového natáčení volantu s následující prodlevou (čas T0 + 1 na obrázku 1) nesmí přesáhnout 35 % prvního píku rychlosti stáčení zaznamenané poté, co úhel natočení volantu změní znaménko (mezi prvním a druhým píkem) ( na obrázku 1) v průběhu téže části zkoušky.
na obrázku 1) v průběhu téže části zkoušky.
Obrázek 1
Poloha volantu a údaje o rychlosti stáčení pro hodnocení boční stability
 Text obrazu
Text obrazu
7.2. Rychlost stáčení měřená 1,75 sekundy po vykonání sinusového natáčení volantem s následující prodlevou nesmí překročit 20 % prvního píku rychlosti stáčení zaznamenané po tom, co úhel natočení volantu změní znaménko (mezi prvním a druhým píkem) v průběhu téže části zkoušky.
7.3. Boční posuv těžiště vozidla vzhledem k jeho počátečnímu přímému směru musí být nejméně 1,83 m u vozidel, která mají maximální hmotnost nejvýše 3 500 kg, a 1,52 m u vozidel, která mají maximální hmotnost větší než 3 500 kg, když je vypočten za 1,07 sekundy po počátku manévru natáčení volantu. Počátek manévru natáčení volantu je vymezen v bodě 9.11.6.
7.3.1. Boční posuv se vypočte jako dvojitý integrál vzhledem k času měření bočního zrychlení v těžišti vozidla podle vzorce:
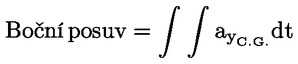
U zkoušky pro schválení typu je možné povolit alternativní metodu měření za předpokladu, že tato metoda představuje alespoň stejný stupeň přesnosti jako metoda dvojitého integrálu.
7.3.2. Čas t = 0 pro provedení integrace je okamžik počátku zásahu na volantu, který je nazýván počátkem manévru natáčení volantu. Počátek manévru natáčení volantu je vymezen v bodě 9.11.6.
7.4. Zjištění chybné funkce ESC
Vozidlo musí být vybaveno sdělovačem, který signalizuje řidiči výskyt každé chybné funkce, která ovlivňuje generování nebo předávání signálu řízení nebo odezvy v systému elektronického řízení stability.
7.4.1. Sdělovač chybné funkce ESC:
|
7.4.1.1. |
musí splňovat příslušné technické požadavky předpisu č. 121; |
|
7.4.1.2. |
s výjimkou ustanovení v bodě 7.4.1.3 se sdělovač chybné funkce ESC musí rozsvítit, jestliže existuje chybná funkce, a musí zůstat trvale rozsvícen za podmínek uvedených v bodě 7.4 tak dlouho, dokud chybná funkce trvá, a to vždy, když je systém zámku zapalování v poloze „zapnuto“ („běh motoru“); |
|
7.4.1.3. |
s výjimkou ustanovení v bodě 7.4.2 musí být každý sdělovač chybné funkce ESC uveden do činnosti za účelem kontroly funkce žárovky buď tehdy, když je zámek zapalování uveden do polohy „zapnuto“ („běh motoru“) při vypnutém motoru, nebo jestliže je zámek zapalování v poloze mezi „zapnuto“ („běh motoru“) a „start“ v případě, že tuto polohu určil výrobce jako kontrolní polohu; |
|
7.4.1.4. |
musí zhasnout při příštím uvedení zámku zapalování do polohy „zapnuto“ poté, co byla chybná funkce odstraněna podle bodu 9.10.4; |
|
7.4.1.5. |
může sloužit také k indikování chybné funkce připojených systémů/funkcí, jako jsou regulace trakce, stabilitní asistenční systémy přípojných vozidel, řízení brzdění v zatáčkách a jiné podobné funkce, které používají ovládání akcelerátoru a/nebo individuální řízení točivého momentu, aby působily na ovládání konstrukčních částí společných s ESC. |
7.4.2. Sdělovač chybné funkce ESC nemusí být uveden do činnosti, pokud je zablokována činnost startéru.
7.4.3. Požadavek bodu 7.4.1.3 neplatí pro sdělovače zobrazující se na společné zobrazovací ploše.
7.4.4. Výrobce může použít sdělovač chybné funkce ESC s blikajícím světlem k indikaci zásahu ESC a/nebo zásahu systémů souvisejících s ESC (jak jsou uvedeny v bodě 7.4.1.5), zásahu ESC na úhel rejdu jednoho nebo několika kol pro účely stability vozidla.
7.5. Ovladače k vypnutí ESC a ovladače jiných systémů
Výrobce může nainstalovat ovladač „vypnutí ESC“, který musí být osvětlen, když jsou v činnosti světlomety vozidla, a jehož účelem je uvést systém ESC do režimu, ve kterém už nemusí splňovat vlastnosti požadované v bodech 7, 7.1, 7.2 a 7.3. Výrobci mohou také nainstalovat ovladače pro jiné systémy, které mají pomocné funkce k činnosti ESC. Ovladače jednoho i druhého druhu, které uvedou systém ESC do režimu, v němž už nemusí splňovat vlastnosti požadované v bodech 7, 7.1, 7.2 a 7.3, jsou přípustné za podmínky, že systém také splňuje požadavky bodů 7.5.1, 7.5.2 a 7.5.3.
7.5.1. Systém ESC vozidla se musí vždy vrátit do režimu původního seřízení výrobcem, který splňuje požadavky bodů 6 a 7, na počátku každého nového cyklu uvedení do činnosti zapalování, bez ohledu na to, jaký režim předtím zvolil řidič. Avšak systém ESC vozidla se nemusí na počátku každého nového cyklu zapalování vždy vrátit do režimu, ve kterém splňuje požadavky bodů 7 až 7.3, jestliže:
|
7.5.1.1. |
vozidlo pracuje v režimu pohonu čtyř kol, čímž se spolu propojí hnací soukolí na přední a zadní nápravě a je k dispozici doplňkový redukční převod mezi otáčkami motoru a rychlostí vozidla s poměrem nejméně 1,6, který zvolí řidič pro jízdu nízkou rychlostí v terénu; nebo |
|
7.5.1.2. |
vozidlo pracuje v režimu (zvoleném řidičem) pohonu čtyř kol, který je určený k provozu při vyšších rychlostech na silnicích, na jejichž povrchu je sníh, písek nebo bláto, přičemž se spolu propojí hnací soukolí na přední a zadní nápravě, za podmínky, že v tomto režimu vozidlo splňuje požadavky na stabilitní vlastnosti podle bodů 7.1 a 7.2 při zkušebních podmínkách specifikovaných v bodě 8. Jestliže však systém má více než jeden režim ESC, který splňuje požadavky bodů 7.1 a 7.2 pro konfiguraci pohonu zvolenou pro předchozí cyklus zapalování, musí se ESC vrátit do režimu původního seřízení výrobcem pro danou konfiguraci pohonu na počátku každého nového cyklu zapalování. |
7.5.2. Ovladač, jehož jediným účelem je uvést systém ESC do režimu, v kterém už dále nebude splňovat požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3, musí splňovat příslušné technické požadavky předpisu č. 121.
7.5.3. Ovladač pro systém ESC, jehož účelem je uvést systém ESC do různých režimů, z nichž nejméně jeden už dále nebude splňovat požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3, musí splňovat příslušné technické požadavky předpisu č. 121.
Alternativně, pokud je režim systému ESC řízen multifunkčním ovladačem, musí displej zřetelně identifikovat řidiči polohu ovladače pro tento režim s použitím symbolu „off“ pro systém elektronického řízení stability podle definice v předpisu č. 121.
7.5.4. Ovladač pro jiný systém, jehož vedlejším účinkem je uvedení systému ESC do režimu, v kterém systém ESC už dále nebude splňovat požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3, nemusí být označen symbolem „ESC Off“ podle bodu 7.5.2.
7.6. Sdělovač vypnutí ESC
Jestliže výrobce zvolí namontování ovladače k vypnutí systému ESC nebo k omezení jeho vlastností, jak je uvedeno v bodě 7.5, musí být splněny požadavky bodů 7.6.1 až 7.6.4 za účelem výstrahy řidiči o omezení funkčnosti systému ESC. Tento požadavek neplatí pro režim zvolený řidičem uvedený v bodě 7.5.1.2.
7.6.1. Výrobce vozidla musí instalovat sdělovač signalizující, že vozidlo bylo uvedeno do režimu, ve kterém už není možno splňovat požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3, jestliže systém takový režim obsahuje.
7.6.2. Sdělovač vypnutí ESC:
|
7.6.2.1. |
musí splňovat příslušné technické požadavky předpisu č. 121; |
|
7.6.2.2. |
musí zůstat trvale rozsvícen tak dlouho, dokud je ESC v režimu, ve kterém již není schopen splňovat požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3; |
|
7.6.2.3. |
s výjimkou ustanovení v bodech 7.6.3. a 7.6.4 musí být každý sdělovač vypnutí ESC uveden do činnosti za účelem kontroly funkce žárovky buď tehdy, když je zámek zapalování uveden do polohy „zapnuto“ („běh motoru“) při vypnutém motoru, nebo jestliže je zámek zapalování v poloze mezi „zapnuto“ („běh motoru“) a „start“ v případě, že tuto polohu určil výrobce jako kontrolní polohu; |
|
7.6.2.4. |
musí zhasnout, jakmile se systém ESC vrátí do původního standardního nastavení výrobce. |
7.6.3. Sdělovač vypnutí systému ESC nemusí být uveden do činnosti, když je zablokována činnost startéru.
7.6.4. Požadavek bodu 7.6.2.3 neplatí pro sdělovače zobrazující se na společné zobrazovací ploše.
7.6.5. Výrobce vozidla může použít sdělovač vypnutí ESC k indikování úrovně funkce ESC jiné než původního standardního nastavení výrobce, i když vozidlo splňuje požadavky na vlastnosti podle bodů 7, 7.1, 7.2 a 7.3 při uvedené úrovni funkce ESC.
7.7. Technická dokumentace systému ESC
Dokumentace o schválení musí obsahovat dokumentaci výrobce uvedenou dále v bodech 7.7.1 až 7.7.4, aby se potvrdilo, že vozidlo je vybaveno systémem ESC, který splňuje definici systému ESC stanovenou v bodě 2.7 tohoto předpisu.
7.7.1. Schéma systému identifikující celý hardware systému ESC. Schéma musí identifikovat, které konstrukční části se používají ke generování brzdných momentů na každém kole, k určování rychlosti stáčení vozidla, k vyhodnocení bočního skluzu nebo změny bočního skluzu a k určení vstupních hodnot volantu od řidiče.
7.7.2. Stručný písemný výklad postačující k popisu základních provozních charakteristik systému ESC. Tento výklad musí zahrnovat celkový popis schopností systému vytvářet brzdné momenty na každém kole a způsoby, jimiž systém upravuje hnací moment v průběhu činnosti systému ESC, a vysvětlit, jak se přímo určuje rychlost stáčení vozidla, a to i za podmínek, kdy nejsou k dispozici žádné informace o rychlosti kol. Tento výklad musí také identifikovat rozsah rychlostí vozidla a jednotlivé fáze jízdy (zrychlení, zpomalení, volný dojezd, průběh činnosti ABS nebo regulace trakce), za nichž může být systém ESC v činnosti.
7.7.3. Logické schéma. Toto schéma ilustruje výklad podle bodu 7.7.2.
7.7.4. Informace o nedotáčivosti. Celkový popis příslušných vstupů do počítače, které ovládají hardware systému ESC a popis, jak jsou tyto vstupy použity k omezení nedotáčivosti vozidla.
8. ZKUŠEBNÍ PODMÍNKY
8.1. Okolní podmínky
8.1.1. Okolní teplota je mezi 0 °C a 45 °C.
8.1.2. Maximální rychlost větru nesmí být větší než 10 m/s u vozidel s faktorem statické stability SSF > 1,25 a 5 m/s u vozidel s SSF ≤ 1,25.
8.2. Povrch zkušební dráhy
8.2.1. Zkoušky se provedou na suchém, stejnorodém a tvrdém povrchu. Nevhodné jsou povrchy s nepravidelnostmi a zvlněními, jako jsou prolákliny a široké trhliny.
8.2.2. Pokud není stanoveno jinak, povrch zkušební dráhy musí mít jmenovitý (6) maximální brzdný koeficient 0,9, který se měří:
|
8.2.2.1. |
buď s referenční zkušební pneumatikou podle normy ASTM č. E1136 (American Society for Testing and Materials), podle metody ASTM č. E1337-90, při rychlosti 40 mil. za hodinu; nebo |
|
8.2.2.2. |
metodou určení hodnoty „k“ specifikovanou v dodatku 2 k příloze 6 předpisu č. 13-H. |
8.2.3. Zkušební povrch má pravidelný sklon nejvýše 1 %.
8.3. Stav vozidla
8.3.1. Systém ESC je při všech zkouškách v činnosti.
8.3.2. Hmotnost vozidla. Vozidlo je naložené, s palivovou nádrží naplněnou na nejméně 90 % objemu a uvnitř vozidla je celkové zatížení 168 kg, které se skládá ze zkušebního řidiče, přibližně 59 kg zkušebního zařízení (automatizovaný přístroj k řízení, systém sběru dat a zdroj pro pohon přístroje k řízení) a ze zátěže potřebné k vyrovnání rozdílů v hmotnosti zkušebního řidiče a zkušebního zařízení. Tam, kde je to potřebné, se zátěž umístí na podlahu za předním sedadlem spolujezdce nebo, je-li to nutné, v prostoru pro nohy spolujezdce na předním sedadle. Veškerá zátěž musí být zajištěna tak, aby se v průběhu zkoušek nemohla posouvat.
8.3.3. Pneumatiky. Pneumatiky jsou nahuštěny na tlak(y) doporučený(é) výrobcem vozidla pro studené pneumatiky, např. jak jsou specifikovány na nálepce ve vozidle nebo na štítku s údaji o huštění pneumatik. Pneumatiky mohou být opatřeny dušemi, aby se zabránilo vyvlečení patek pláště.
8.3.4. Opěry proti převrácení. Při zkouškách se mohou použít opěry proti převrácení, jestliže se to pokládá za potřebné pro bezpečnost zkušebního řidiče. V takovém případě u vozidel s faktorem statické stability SSF ≤ 1,25 platí tato ustanovení:
|
8.3.4.1. |
vozidla s provozní hmotností menší než 1 588 kg se vybaví „lehkými“ opěrami proti převrácení. Lehké opěry proti převrácení jsou konstruovány tak, aby jejich hmotnost byla nejvýše 27 kg a klopný moment setrvačnosti byl nejvýše 27 kg/m2; |
|
8.3.4.2. |
vozidla s provozní hmotností mezi 1 588 kg a 2 722 kg se vybaví „standardními“ opěrami proti převrácení. Standardní opěry proti převrácení jsou konstruovány tak, aby jejich hmotnost byla nejvýše 32 kg a klopný moment setrvačnosti byl nejvýše 35,9 kg/m2; |
|
8.3.4.3. |
vozidla s provozní hmotností 2 722 kg nebo více se vybaví „těžkými“ opěrami proti převrácení. Těžké opěry proti převrácení jsou konstruovány tak, aby jejich hmotnost byla nejvýše 39 kg a klopný moment setrvačnosti byl nejvýše 40,7 kg/m2. |
8.3.5. Automatizovaný přístroj k řízení. Přístroj k řízení naprogramovaný k vykonávání požadovaných manévrů řízení se použije podle bodů 9.5.2, 9.5.3, 9.6 a 9.9. Přístroj k řízení musí být schopný vytvořit momenty na hřídeli volantu mezi 40 Nm až 60 Nm. Přístroj k řízení musí být schopný vytvořit tyto momenty při rychlostech natáčení volantu až do 1 200 stupňů za sekundu.
9. ZKUŠEBNÍ POSTUPY
9.1. Pneumatiky se nahustí na tlak(y) doporučený(é) výrobcem vozidla pro studené pneumatiky, např. jak jsou specifikovány na nálepce ve vozidle nebo na štítku s údaji o huštění pneumatik.
9.2. Kontrola žárovky sdělovače. Na stojícím vozidle a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ se uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“), nebo, podle případu, do polohy určené ke kontrole žárovky. Sdělovač chybné funkce ESC se musí uvést do činnosti jako kontrola funkce žárovky, jak je specifikováno v bodě 7.4.1.3, a pokud je na vozidle, musí se také uvést do činnosti sdělovač vypnutí ESC jako kontrola funkce žárovky, jak je specifikováno v bodě 7.6.2.3. Kontrola žárovky sdělovače se nepožaduje u sdělovače, který se zobrazí na společné zobrazovací ploše, jak je specifikováno v bodech 7.4.3 a 7.6.4.
9.3. Kontrola ovladače vypnutí ESC. U vozidel vybavených ovladačem vypnutí ESC se u stojícího vozidla a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“). Ovladač vypnutí ESC se uvede do činnosti a ověří se, že se rozsvítí sdělovač vypnutí ESC, jak je uvedeno v bodě 7.6.2. Systém zámku zapalování se uvede opět do polohy „uzamknuto“ nebo „vypnuto“. Znovu se uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“) a ověří se, že sdělovač vypnutí ESC zhasl, čímž se udává, že systém ESC byl znovu zapnut, jak je uvedeno v bodě 7.5.1.
9.4. Příprava brzd
Brzdy vozidla se připraví, jak je popsáno v bodech 9.4.1 až 9.4.4.
9.4.1. Vykoná se deset zabrzdění z rychlosti 56 km/h s průměrným zpomalením přibližně 0,5 g.
9.4.2. Bezprostředně po sérii zabrzdění z 56 km/h se vykonají tři doplňková zabrzdění z rychlosti 72 km/h s větším zpomalením.
9.4.3. Při brzděních podle bodu 9.4.2 se působí na brzdový pedál silou, která postačí k uvedení protiblokovacího systému vozidla (ABS) do činnosti po větší část každého brzdění.
9.4.4. Po závěrečném zabrzdění podle bodu 9.4.2 jede vozidlo rychlostí 72 km/h po dobu pěti minut, aby se brzdy ochladily.
9.5. Příprava pneumatik
Pneumatiky se připraví následujícím postupem podle bodů 9.5.1 až 9.5.3, aby se odstranil lesklý povrch z výrobní formy a aby se dosáhlo provozní teploty bezprostředně před začátkem zkoušek podle bodů 9.6 a 9.9.
9.5.1. Se zkoušeným vozidlem se jede po kružnici o průměru 30 m rychlostí, při které dojde k bočnímu zrychlení přibližně 0,5 g až 0,6 g, a projedou se tři kružnice ve směru pohybu hodinových ručiček a tři kružnice ve směru proti pohybu hodinových ručiček.
9.5.2. Použije se sinusové natáčení volantu s frekvencí 1 Hz, s vrcholem amplitudy úhlu natočení volantu odpovídajícím maximu bočního zrychlení 0,5 g až 0,6 g, a při rychlosti 56 km/h se s vozidlem projedou čtyři úseky a během každého z těchto čtyř úseků se vykoná 10 cyklů sinusového natáčení volantu.
9.5.3. Amplituda úhlu natočení volantu v posledním cyklu posledního úseku je dvojnásobná v porovnání s ostatními cykly. Maximální doba, která je přípustná mezi dvěma kružnicovými průjezdy nebo mezi dvěma průjezdy úseku, je pět minut.
9.6. Manévr s pomalu se zvětšujícím úhlem natočení volantu
S vozidlem se provedou dvě série jízd zkoušky s pomalu se zvětšujícím úhlem natočení volantu při konstantní rychlosti vozidla 80 km/h ± 2 km/h a s úhlem natočení volantu, který roste o 13,5°/s, do dosažení bočního zrychlení přibližně 0,5 g. Každá série zkoušek zahrnuje tři opakované zkoušky. U jedné série se volant natáčí proti směru pohybu hodinových ručiček, u druhé série zkoušek ve směru pohybu hodinových ručiček. Maximální doba přípustná mezi každou z jednotlivých zkoušek je pět minut.
9.6.1. Ze zkoušek s pomalu se zvětšujícím úhlem natočení volantu se určí hodnota „A“. Hodnota „A“ je úhel natočení volantu vyjádřený ve stupních, při kterém se dosáhne ustáleného bočního zrychlení (korigovaného metodou podle bodu 9.11.3) zkoušeného vozidla o hodnotě 0,3 g. Lineární regresí se vypočte z každé ze šesti zkoušek s pomalu se zvětšujícím úhlem natočení volantu hodnota „A“ na nejbližší desetinu stupně. Určí se střední hodnota ze šesti vypočtených absolutních hodnot „A“ a zaokrouhlí se na nejbližší desetinu stupně, což je konečná výsledná hodnota „A“, která se používá dále.
9.7. Jakmile byla určena hodnota „A“, vykoná se bezprostředně před zkouškou sinusového natáčení volantu s následující prodlevou podle bodu 9.5 postup přípravy pneumatik popsaný v bodě 9.9, aniž by se pneumatiky vyměnily. První série zkoušek sinusového natáčení volantem s následující prodlevou musí začít nejpozději do dvou hodin od ukončení zkoušek s pomalu se zvětšujícím úhlem natočení volantu podle bodu 9.6.
9.8. Zkontroluje se, že systém ESC je zapnut, a to ověřením, že sdělovač chybné funkce ESC ani sdělovač vypnutí ESC (pokud existuje) nejsou rozsvíceny.
9.9. Zkouška se sinusovým natáčením volantu s následující prodlevou k ověření zásahu proti přetáčivosti a k ověření odezvy
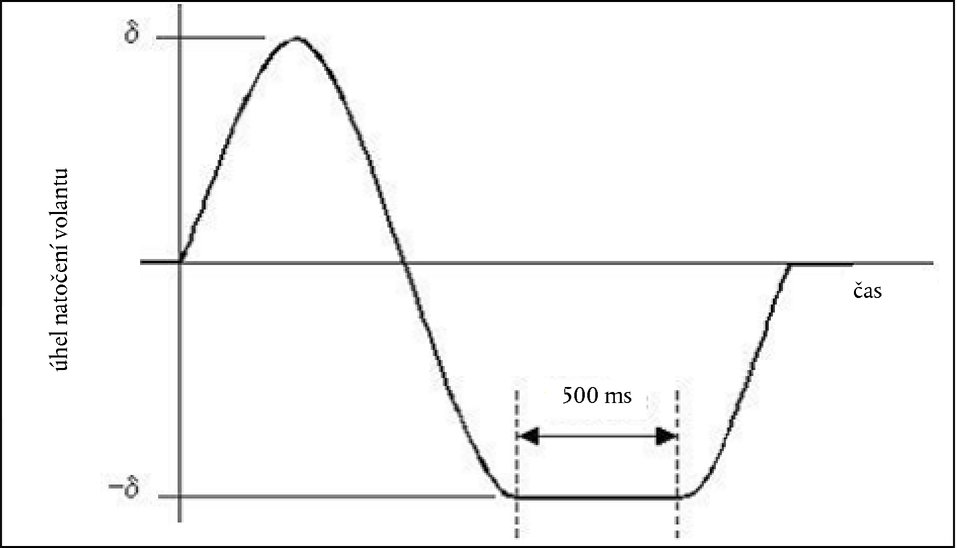
S vozidlem se vykonají dvě série zkoušek se vstupem na volantu ve formě sinusové vlny s frekvencí 0,7 Hz a s prodlevou 500 ms začínající na druhém vrcholu amplitudy, jak je znázorněno na obrázku 2 (zkouška sinusového natáčení volantu s následující prodlevou). U jedné série se volant natáčí proti směru pohybu hodinových ručiček v první polovině cyklu, u druhé série se volant natáčí ve směru pohybu hodinových ručiček v první polovině cyklu. Mezi každou z dílčích zkoušek se stojící vozidlo nechá ochladit po dobu 1,5 až 5 minut.
Obrázek 2
Sinusové natáčení volantu s následující prodlevou
 Text obrazu
Text obrazu
9.9.1. Volant se začne natáčet, když se vozidlo pohybuje volným dojezdem, se zařazeným nejvyšším rychlostním stupněm a rychlostí 80 km/h ± 2 km/h.
9.9.2. U počáteční zkoušky z každé série zkoušek je amplituda natáčení volantu 1,5 A, kde A je úhel natočení volantu zjištěný podle bodu 9.6.1.
9.9.3. V každé sérii zkušebních jízd se amplituda natáčení volantu zvětšuje od jízdy k jízdě o 0,5 A za podmínky, že u žádné takové zkušební jízdy nedojde k amplitudě natáčení volantu větší než při konečné zkušební jízdě specifikované v bodě 9.9.4.
9.9.4. Amplituda natáčení řízení poslední zkušební jízdy v každé sérii je větší z hodnot 6,5 A nebo 270° za podmínky, že vypočtená hodnota 6,5 A je nejvýše 300°. Jestliže kterýkoli přírůstek o hodnotě 0,5 A, a to až do 6,5 A, má za následek hodnotu větší než 300°, musí mít amplituda natáčení řízení v poslední zkušební jízdě hodnotu 300°.
9.9.5. Po ukončení dvou sérií zkušebních jízd se následně zpracují údaje rychlosti stáčení a bočního zrychlení, jak je uvedeno v bodě 9.11.
9.10. Zjištění chybné funkce ESC
9.10.1. Odpojením zdroje napájení ke kterékoli části ESC nebo rozpojením kteréhokoli elektrického spojení mezi částmi ESC (při přerušeném napájení) se simuluje jedna nebo více chybných funkcí ESC. Při simulaci chybné funkce ESC se nerozpojí elektrická spojení sdělovače (sdělovačů) a/nebo volitelný ovladač (ovladače) systému ESC.
9.10.2. U stojícího vozidla a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ se uvede systém zámku zapalování do polohy „start“ a nastartuje se motor. S vozidlem se jede tak, aby dosáhlo rychlost 48 km/h ± 8 km/h nejpozději za 30 sekund od startu motoru, a v průběhu následujících dvou minut se při této rychlosti vykoná nejméně jeden mírný zatáčecí manévr doleva a jeden doprava, bez ztráty směrové stability, a jedno zabrzdění. Ověří se, že se na konci těchto manévrů rozsvítí sdělovač chybné funkce ESC podle bodu 7.4.
9.10.3. Vozidlo se zastaví, systém zámku zapalování se uvede do polohy „vypnuto“ nebo „uzamknuto“. Po uplynutí pěti minut se uvede systém zámku zapalování do polohy „start“ a nastartuje se motor. Ověří se, že sdělovač chybné funkce ESC se opět rozsvítí, aby signalizoval chybnou funkci, a zůstane rozsvícen tak dlouho, dokud motor běží, nebo dokud není chybná funkce opravena.
9.10.4. Systém zámku zapalování se uvede do polohy „vypnuto“ nebo „uzamknuto“. Systém ESC se uvede do stavu normální funkce, systém zámku zapalování se uvede do polohy „start“ a nastartuje se motor. Znovu se vykoná manévr popsaný v bodě 9.10.2 a ověří se, že sdělovač zhasne, jakmile se manévr ukončí, nebo bezprostředně potom.
9.11. Zpracování údajů po zkoušce – výpočty výsledků
Měření a výpočty rychlosti stáčení a bočního posuvu se vyhodnotí podle metod specifikovaných v bodech 9.11.1 až 9.11.8.
9.11.1. Neupravená data úhlu natočení volantu se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 10 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou.
9.11.2. Neupravená data rychlosti stáčení se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 6 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou.
9.11.3. Neupravená data bočního zrychlení se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 6 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou. Data bočního zrychlení v těžišti vozidla se určí odečtením účinků klopení karoserie vozidla a korekcí údajů v závislosti na umístění snímače s použitím transformace souřadnic. K získávání dat se musí akcelerometr pro boční zrychlení umístit co nejblíže k podélnému a příčnému těžišti vozidla.
9.11.4. Rychlost natáčení volantu se určí derivací filtrovaných hodnot úhlu natočení volantu. Data úhlové rychlosti volantu se pak filtrují filtrem s klouzavou střední hodnotou měnící se vždy o 0,1 s.
9.11.5. U kanálů pro data bočního zrychlení, rychlosti stáčení a úhlu natočení volantu se pak nastaví nula s použitím definovaného „rozsahu nulování“. Metody, které se použijí ke stanovení rozsahu nulování, jsou uvedeny v bodech 9.11.5.1 a 9.11.5.2.
9.11.5.1. S použitím údajů o úhlové rychlosti natáčení volantu vypočtených metodami popsanými v bodě 9.11.4 se určí první okamžik, kdy tato rychlost překročí 75°/s. Od tohoto okamžiku musí úhlová rychlost natáčení volantu zůstat větší než 75°/s po dobu nejméně 200 ms. Jestliže není splněna druhá podmínka, určí se nejbližší další okamžik, ve kterém úhlová rychlost natáčení volantu překročí 75°/s a zkontroluje se, zda je splněna podmínka 200 ms. Tento postup se opakuje až do splnění obou podmínek.
9.11.5.2. „Rozsah nulování“ je vymezen jako časový úsek 1,0 sekundy před okamžikem, kdy úhlová rychlost natáčení volantu překročí 75°/s (tj. okamžikem, kdy úhlová rychlost natáčení volantu překročí 75°/s, je definován konec „rozsahu nulování“).
9.11.6. Počátek manévru natáčení volantu je vymezen jako první okamžik, v kterém filtrovaná a k nule nastavená data úhlu natočení volantu dosáhnou – 5° (pokud se počáteční akce na volant děje proti směru pohybu hodinových ručiček) nebo + 5° (pokud se počáteční akce na volant děje ve směru pohybu hodinových ručiček) po uplynutí doby definující konec „rozsahu nulování“. Čas v okamžiku počátku manévru natáčení volantu se vypočte interpolací.
9.11.7. Ukončení manévru natáčení volantu je vymezeno jako okamžik, kdy se úhel natáčení volantu vrátí zpět na nulu na konci sinusového natáčení volantu s prodlevou. Čas v okamžiku nulového natočení volantu se vypočte interpolací.
9.11.8. Druhý vrchol rychlosti stáčení je vymezen jako první vrchol rychlosti stáčení vzniklý natáčením volantu v opačném směru. Rychlosti stáčení v době 1,0 a 1,75 sekundy se po ukončení manévru natáčení volantu určí interpolací.
9.11.9. Určí se boční rychlost integrací dat bočního zrychlení, která byla korigována, filtrována a u nichž byla nastavena nula. Nulová boční rychlost je vztažena k okamžiku začátku manévru natáčení volantu. Určí se boční posuv integrováním boční rychlosti, u níž byla nastavena nula. Nulový boční posuv je vztažen k okamžiku začátku manévru natáčení volantu. Boční posuv za 1,07 sekund od okamžiku začátku manévru natáčení volantu se určí interpolací.
10. ZMĚNA TYPU VOZIDLA NEBO JEHO SYSTÉMU ESC A ROZŠÍŘENÍ SCHVÁLENÍ
10.1. Každá změna stávajícícho typu vozidla se musí oznámit schvalovacímu orgánu, který typ vozidla schválil.
Tento orgán poté:
|
a) |
po konzultaci s výrobcem rozhodne, že je třeba udělit nové schválení typu, nebo |
|
b) |
použije postup podle bodu 10.1.1 (revize), případně postup podle bodu 10.1.2 (rozšíření). |
10.1.1. Revize
Pokud byly změněny údaje zaznamenané v informačních dokumentech a schvalovací orgán usoudí, že provedené úpravy pravděpodobně nemají znatelné nepříznivé účinky a brzdové pedály v každém případě stále splňují požadavky, označí se změna jako „revize“.
V tom případě vydá schvalovací orgán podle potřeby revidované stránky informačních dokumentů a na každé revidované stránce zřetelně vyznačí povahu změny a datum nového vydání stránky. Za splnění tohoto požadavku se považuje rovněž vydání konsolidované a aktualizované verze informačních dokumentů spolu s podrobným popisem změn.
10.1.2. Rozšíření
Jako „rozšíření“ se změna označuje v případě, že kromě změny údajů zaznamenaných v informačních dokumentech:
|
a) |
jsou požadovány další kontroly nebo zkoušky, nebo |
|
b) |
byly změněny jakékoli informace ve formuláři sdělení (s výjimkou jeho příloh), nebo |
|
c) |
je požadováno schválení poslední série změn po jejím vstupu v platnost. |
10.2. Potvrzení nebo odmítnutí schválení s uvedením příslušné změny se postupem podle bodu 4.3 zašle smluvním stranám dohody, které používají tento předpis. Kromě toho musí být odpovídajícím způsobem změněn seznam informačních dokumentů a zkušebních protokolů připojený k formuláři sdělení v příloze 1, aby uváděl datum poslední revize nebo rozšíření.
10.3. Příslušný orgán, který vydává rozšíření schválení, přidělí každému formuláři sdělení vydaném pro takovéto rozšíření pořadové číslo.
11. SHODNOST VÝROBY
Postupy pro shodnost výroby musí být v souladu s postupy stanovenými v dodatku 2 k dohodě (E/ECE/324-E/ECE/TRANS/505/Rev.2), přičemž musí být splněny tyto požadavky:
|
11.1. |
Každé vozidlo schválené podle tohoto předpisu musí být vyrobeno tak, aby se shodovalo se schváleným typem tím, že splňuje požadavky bodů 5, 6 a 7. |
|
11.2. |
Schvalovací orgán, který udělil schválení typu, může kdykoliv ověřit metody kontroly shodnosti použité v každém výrobním zařízení. Obvyklá četnost těchto kontrol je jednou za dva roky. |
12. POSTIHY ZA NESHODNOST VÝROBY
12.1. Schválení typu vozidla udělené podle tohoto předpisu může být odňato, pokud nejsou splněny požadavky uvedené v bodě 8.1.
12.2. Pokud smluvní strana dohody používající tento předpis odejme schválení, které dříve udělila, musí o tom ihned informovat sdělením na formuláři dle vzoru v příloze 1 tohoto předpisu ostatní smluvní strany, které uplatňují tento předpis.
13. DEFINITIVNÍ UKONČENÍ VÝROBY
Pokud držitel schválení zcela ukončí výrobu typu vozidla schváleného podle tohoto předpisu, musí o tom informovat orgán, který schválení udělil. Na základě tohoto oznámení o tom uvedený orgán informuje ostatní smluvní strany dohody, které používají tento předpis, a to kopií osvědčení podle vzoru v příloze 5 tohoto předpisu.
14. NÁZVY A ADRESY SCHVALOVACÍCH ORGÁNŮ A NÁZVY A ADRESY TECHNICKÝCH ZKUŠEBEN ODPOVĚDNÝCH ZA PROVÁDĚNÍ SCHVALOVACÍCH ZKOUŠEK
Smluvní strany dohody, které uplatňují tento předpis, sdělí sekretariátu Organizace spojených národů názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek, jakož i názvy a adresy schvalovacích orgánů, které schválení udělují a jimž se mají zasílat formuláře osvědčující udělení, rozšíření, zamítnutí nebo odnětí schválení vydané v jiných zemích.
(1) Kategorie vozidel M1 a N1 jsou vymezeny v Úplném usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4 bod 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Skupina náprav se posuzuje jako jednoduchá náprava a dvojitá montáž kol jako kolo jednoduché.
(3) Rozlišovací čísla smluvních stran Dohody z roku 1958 jsou uvedena v příloze 3 Úplného usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 4, příloha 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Skupina náprav se posuzuje jako jednoduchá náprava a dvojitá montáž kol jako kolo jednoduché.
(5) Znění v tomto předpisu vychází z toho, že k řízení vozidla se používá volant. Vozidla používající jiný druh řízení mohou být v souladu s touto přílohou také schválena, pokud je výrobce schopen prokázat technické zkušebně, že požadavků na účinnost uvedených v tomto předpisu může být dosaženo použitím vstupů řidiče rovnocenných vstupům uvedeným v bodě 7 tohoto předpisu.
(6) „Jmenovitou“ hodnotou se rozumí teoretická cílová hodnota.
PŘÍLOHA 2
USPOŘÁDÁNÍ ZNAČEK SCHVÁLENÍ TYPU
VZOR A
(Viz bod 4.4 tohoto předpisu)
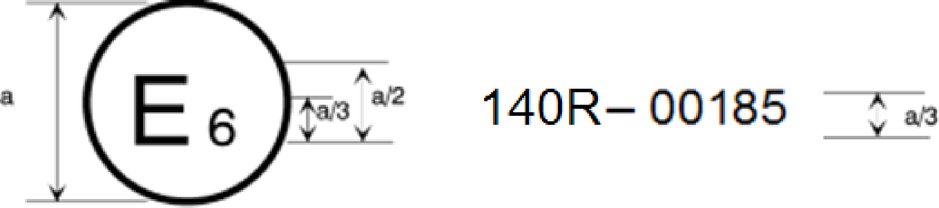
Výše znázorněná značka schválení, která se připevňuje k vozidlu, označuje, že dotčený typ vozidla byl z hlediska elektronického řízení stability podle předpisu č. 140 schválen v Belgii (E6). První dvě číslice čísla schválení udávají, že schválení bylo uděleno v souladu s požadavky předpisu č. 140 v jeho původním znění.
VZOR B
(Viz bod 4.5 tohoto předpisu)

Výše uvedená značka schválení umístěná na vozidle udává, že tento typ vozidla byl schválen v Belgii (E6) podle předpisů č. 140 a 24 (1). (V případě posledně uvedeného předpisu je korigovaná hodnota součinitele absorpce 1,30 m – 1). Čísla schválení udávají, že v den, kdy byla jednotlivá schválení udělena, byl předpis č. 140 ve svém původním znění a předpis č. 24 zahrnoval sérii změn 02.
(1) Toto číslo je uvedeno jen jako příklad.
PŘÍLOHA 3
POUŽITÍ SIMULACE DYNAMICKÉ STABILITY
Účinnost systému elektronického řízení stability lze určit počítačovou simulací.
1. POUŽITÍ SIMULACE
1.1. Stabilitní funkci vozidla musí výrobce vozidla prokázat schvalovacímu orgánu nebo technické zkušebně simulací dynamických manévrů podle bodu 9.9 tohoto předpisu.
1.2. Simulace je prostředkem, kterým se mají prokázat stabilitní vlastnosti vozidla při:
|
a) |
rychlosti stáčení, jednu sekundu po konci sinusového natáčení volantu s následující prodlevou (čas T0 + 1); |
|
b) |
rychlosti stáčení, 1,75 sekundy po konci sinusového natáčení volantu s následující prodlevou; |
|
c) |
bočním posuvu těžiště vozidla vzhledem k jeho počátečnímu přímému směru. |
1.3. Simulace se musí provést s ověřeným nástrojem modelování a simulačním nástrojem a s použitím dynamických manévrů podle bodu 9.9 tohoto předpisu za zkušebních podmínek podle bodu 8 tohoto předpisu.
Metoda, kterou se ověří správnost simulačního nástroje, je uvedena v příloze 4 tohoto předpisu.
PŘÍLOHA 4
SIMULAČNÍ NÁSTROJ DYNAMICKÉ STABILITY A OVĚŘENÍ JEHO SPRÁVNOSTI
1. SPECIFIKACE SIMULAČNÍHO NÁSTROJE
1.1. Metoda simulace musí vzít v úvahu hlavní faktory, které ovlivňují směrový a klopný pohyb vozidla. Typický model může obsahovat následující parametry vozidla, jak v explicitním tvaru, tak v implicitním tvaru:
|
a) |
náprava/kolo; |
|
b) |
zavěšení nápravy; |
|
c) |
pneumatika; |
|
d) |
podvozek/karoserie vozidla; |
|
e) |
motorová skupina/hnací ústrojí, v příslušných případech; |
|
f) |
brzdový systém; |
|
g) |
hmotnost nákladu. |
1.2. Stabilitní funkce vozidla se připojí k simulačnímu modelu prostřednictvím:
|
a) |
subsystému (softwarového modelu) simulačního nástroje, nebo |
|
b) |
elektronické řídící jednotky v konfiguraci hardwarové smyčky. |
2. OVĚŘENÍ SPRÁVNOSTI SIMULAČNÍHO NÁSTROJE
2.1. Správnost použitého nástroje modelování a simulačního nástroje se ověří prostřednictvím porovnání s praktickými zkouškami vozidla. Zkoušky použité k ověření správnosti musí být dynamické manévry podle bodu 9.9 tohoto předpisu.
V průběhu zkoušek se zaznamenají nebo vypočtou následující proměnné vyjadřující pohyb, které jsou vhodné, a to podle normy ISO 15037 Část 1:2006: Všeobecné podmínky pro osobní automobily nebo Část 2:2002: Všeobecné podmínky pro těžká vozidla a autobusy (v závislosti na kategorii vozidla):
|
a) |
úhel natáčení volantu (δΗ); |
|
b) |
podélná rychlost (vX); |
|
c) |
boční skluz (β) nebo boční rychlost (vY) – (nepovinné); |
|
d) |
podélné zrychlení (aX) – (nepovinné); |
|
e) |
boční zrychlení (aY); |
|
f) |
rychlost stáčení (dψ/dt); |
|
g) |
rychlost klopení (dφ/dt); |
|
h) |
rychlost klonění (dθ/dt); |
|
i) |
úhel klopení (φ); |
|
j) |
úhel klonění (θ). |
2.2. Cílem je ukázat, že simulované chování vozidla a činnost stabilitní funkce vozidla jsou srovnatelné s tím, co bylo zjištěno praktickými zkouškami vozidla.
2.3. Simulátor se pokládá za potvrzený, když je jeho výstup srovnatelný s výsledky praktických zkoušek provedených s daným typem vozidla v průběhu dynamických manévrů podle bodu 9.9 tohoto předpisu. Prostředkem porovnání je činnost a sled stabilitní funkce vozidla při simulaci a v praktických zkouškách vozidla.
2.4. Fyzikální parametry, které jsou rozdílné u referenčního vozidla a u simulovaných konfigurací vozidla, se musí v simulaci příslušně změnit.
2.5. Musí se vypracovat zkušební protokol o simulaci, jehož vzor je uveden v příloze 5 tohoto předpisu, a jeho kopie se musí přiložit k protokolu pro schválení vozidla.
PŘÍLOHA 5
ZKUŠEBNÍ PROTOKOL K SIMULAČNÍMU NÁSTROJI STABILITNÍ FUNKCE VOZIDLA
Číslo zkušebního protokolu: …
1. IDENTIFIKACE
1.1. Název a adresa výrobce simulačního nástroje …
1.2. Identifikace simulačního nástroje: název/model/číslo (hardware a software) …
2. ROZSAH POUŽITÍ
2.1. Typ vozidla: …
2.2. Konfigurace vozidla: …
3. OVĚŘOVACÍ ZKOUŠKA VOZIDLA
3.1. Popis vozidla (vozidel): …
3.1.1. Identifikace vozidla (vozidel): značka/model/VIN …
3.1.2. Popis vozidla, včetně zavěšení/kol, motoru a hnacího ústrojí, brzdového systému (brzdových systémů), systému řízení, s názvem/modelem/číslem identifikace: …
3.1.3. Údaje o vozidle použité v simulaci (explicitně): …
3.2. Popis místa (míst), vlastnosti povrchu silnice/zkušební dráhy, teplota a datum (data): …
3.3. Výsledky se stabilitní funkcí vozidla v činnosti a mimo činnost, včetně proměnných veličin pohybu, které jsou uvedeny v příloze 4 bodě 2.1, v příslušných případech: …
4. VÝSLEDKY SIMULACE
4.1. Parametry vozidla a hodnoty použité v simulaci, které nebyly vzaty ze skutečně zkoušeného vozidla (implicitní): …
4.2. Stabilita z hlediska stáčení a bočního posuvu podle bodů 7.1 až 7.3 tohoto předpisu: …
5. Tato zkouška byla provedena a výsledky byly uvedeny v protokolu podle přílohy 4 předpisu č. 140.
Technická zkušebna, která zkoušku provedla (1) …
Podpis: …
Datum: …
Schvalovací orgán (1) …
Podpis: …
Datum: …
(1) V případě, že technická zkušebna a schvalovací orgán jsou toutéž organizací, musí podepsat rozdílné osoby.