(EHK/OSN) č. 13-HPředpis Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 13-H – Jednotná ustanovení pro schvalování osobních automobilů z hlediska brzdění
| Publikováno: | Úř. věst. L 230, 31.8.2010, s. 1-80 | Druh předpisu: | Nařízení |
| Přijato: | 31. srpna 2010 | Autor předpisu: | |
| Platnost od: | 31. srpna 2010 | Nabývá účinnosti: | |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
Pouze původní texty EHK/OSN mají podle mezinárodního veřejného práva právní účinek. Je zapotřebí ověřit si status a datum vstupu tohoto předpisu v platnost v nejnovější verzi dokumentu EHK/OSN o statusu TRANS/WP.29/343, který je k dispozici na internetové adrese:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Předpis Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 13-H – Jednotná ustanovení pro schvalování osobních automobilů z hlediska brzdění
Zahrnuje veškerá platná znění až po:
dodatek 9 k původnímu znění předpisu – datum vstupu v platnost: 17. března 2010
OBSAH
PŘEDPIS
|
1. |
Oblast působnosti |
|
2. |
Definice |
|
3. |
Žádost o schválení |
|
4. |
Schválení |
|
5. |
Požadavky |
|
6. |
Zkoušky |
|
7. |
Změny typu vozidla nebo jeho brzdového zařízenía rozšíření schválení typu |
|
8. |
Shodnost výroby |
|
9. |
Postihy za neshodnost výroby |
|
10. |
Definitivní ukončení výroby |
|
11. |
Názvy a adresy technických zkušebenodpovědných za provádění schvalovacích zkoušek,názvy a adresy správních orgánů |
|
12. |
Přechodná ustanovení |
PŘÍLOHY
|
Příloha 1 – |
Oznámení o udělení, rozšíření, odmítnutí či odnětí schválení typu nebo o definitivním ukončení výroby typu vozidla z hlediska brzdění dle předpisu č. 13-H. |
|
Příloha 2 – |
Uspořádání značek schválení typu |
|
Příloha 3 – |
Zkoušky brzd a účinek brzdových systémů |
|
Dodatek – |
Postup sledování stavu nabití baterie |
|
Příloha 4 – |
Ustanovení týkající se zdrojů a zásobníků energie (akumulátorů energie) |
|
Příloha 5 – |
Rozložení brzdných sil mezi nápravy vozidel |
|
Dodatek 1 – |
Metoda zkoušky pořadí blokování kol |
|
Dodatek 2 – |
Metoda zkoušky s dynamometrickými koly |
|
Příloha 6 – |
Podmínky, kterými se řídí zkoušky vozidel s protiblokovacími systémy |
|
Dodatek 1 – |
Symboly a definice |
|
Dodatek 2 – |
Využití adheze |
|
Dodatek 3 – |
Brzdný účinek na površích s rozdílnou adhezí |
|
Dodatek 4 – |
Metoda volby povrchu s nízkým součinitelem adheze |
|
Příloha 7 – |
Postup zkoušky brzdových obložení na setrvačníkovém dynamometru |
|
Příloha 8 – |
Zvláštní požadavky týkající se bezpečnostních hledisek komplexních elektronických řídicích systémů vozidel |
|
Příloha 9 – |
Systémy elektronického řízení stability a brzdové asistenční systémy |
1. OBLAST PŮSOBNOSTI
|
1.1 |
Tento předpis se týká brzdění motorových vozidel kategorií M1 a N1 (1). |
|
1.2 |
Oblast působnosti tohoto předpisu nezahrnuje:
|
2. DEFINICE
Pro účely tohoto předpisu se použijí tyto definice:
|
2.1 |
„Schválením vozidla“ se rozumí schválení typu vozidla z hlediska brzdění. |
|
2.2 |
„Typem vozidla“ se rozumí kategorie vozidel, která se mezi sebou neliší v takových podstatných rozdílech, jako jsou:
|
|
2.3 |
„Brzdovým zařízením“ se rozumí soubor částí, jejichž funkcí je postupné zmenšování rychlosti jedoucího vozidla nebo jeho zastavení nebo jeho udržení v nehybném stavu, jestliže je již zastaveno; tyto funkce jsou specifikovány dále v bodě 5.1.2. Zařízení se skládá z ovládacího orgánu, z převodu brzdy a z vlastní brzdy. |
|
2.4 |
„Ovládacím orgánem“ se rozumí část, kterou řidič přímo ovládá dodávku energie do převodu brzdy, potřebnou pro brzdění nebo jeho ovládání. Touto energií může být svalová energie řidiče nebo jiný zdroj energie ovládaný řidičem, nebo kombinace těchto různých druhů energie. |
|
2.5 |
„Převodem“ se rozumí soubor součástí mezi ovládacím orgánem a brzdou, který je spojuje funkčním způsobem. Převod může být mechanický, hydraulický, pneumatický, elektrický nebo smíšený. Jestliže je brzdění zajišťováno nebo posilováno zdrojem energie nezávislým na řidiči, zásoba energie, kterou zařízení obsahuje, je rovněž součástí převodu. Převod se dělí na dvě navzájem nezávislé funkce: převod ovládání a převod energie. Vždy, když se v tomto předpise užije samotný výraz „převod“, rozumí se jím oba tyto převody, tj. „převod ovládání“ a „převod energie“:
|
|
2.6 |
„Brzdou“ se rozumí konstrukční část, kde se vyvíjejí síly, které kladou odpor pohybu vozidla. Brzda může být třecí (jestliže síly vznikají třením mezi dvěma vzájemně se pohybujícími částmi vozidla); elektrická (jestliže síly vznikají elektromagnetickým účinkem mezi dvěma navzájem se pohybujícími částmi vozidla, které se nedotýkají); hydrodynamická (jestliže síly vznikají účinkem kapaliny, která se nachází mezi dvěma navzájem se pohybujícími částmi vozidla); motorová (jestliže síly vznikají z umělého zvýšení brzdného účinku motoru, který se přenáší na kola). |
|
2.7 |
„Brzdovými zařízeními různých typů“ se rozumí zařízení, lišící se navzájem podstatnými rozdíly, zejména pokud jde o:
|
|
2.8 |
„Součástí brzdového zařízení“ se rozumí jeden z jednotlivých dílů, jejichž soubor tvoří brzdové zařízení. |
|
2.9 |
„Odstupňovatelným brzděním“ se rozumí brzdění, při němž v rámci normální činnosti brzdového zařízení a při brzdění (viz bod 2.16 dále):
|
|
2.10. |
„Naloženým vozidlem“ se rozumí, pokud není uvedeno jinak, vozidlo naložené tak, že dosahuje své „maximální hmotnosti“. |
|
2.11. |
„Maximální hmotností“ se rozumí maximální technicky přípustná hmotnost podle prohlášení výrobce (tato hmotnost může být vyšší, než je „maximální povolená hmotnost“, stanovená vnitrostátním orgánem). |
|
2.12. |
„Rozdělením hmotnosti mezi nápravy“ se rozumí rozdělení působení tíže na hmotnost vozidla a/nebo na jeho náklad mezi nápravy. |
|
2.13. |
„Zatížením kola/nápravy“ se rozumí svislá statická reakce (síla) na povrchu vozovky v místě styku kola/kol nápravy s vozovkou. |
|
2.14. |
„Maximálním statickým zatížením kola nebo nápravy“ se rozumí statické zatížení kola nebo nápravy odpovídající podmínkám zatíženého vozidla. |
|
2.15. |
„Hydraulickým brzdovým zařízením s akumulovanou energií“ se rozumí brzdové zařízení, v němž energii pro jeho činnost dodává tlaková kapalina nahromaděná v jednom nebo ve více akumulátorech, které jsou plněny jedním nebo více tlakovými čerpadly, z nichž každé je opatřeno regulátorem omezujícím tlak na největší určenou hodnotu. Tuto hodnotu stanovuje výrobce. |
|
2.16. |
„Ovládáním“ se rozumí působení na ovládací orgán i jeho uvolnění. |
|
2.17. |
„Elektrickým rekuperačním brzdovým systémem“ se rozumí brzdový systém, který při zpomalování zajišťuje přeměnu kinetické energie vozidla v elektrickou energii.
|
|
2.18. |
„Fázovaným brzděním“ se rozumí způsob, který se může použít tam, kde se dva nebo více zdrojů energie pro brzdění ovládají společným ovládacím orgánem, přičemž jeden ze zdrojů může být použit jako první tím, že použití dalšího zdroje/zdrojů je zpožděno tak, aby byl potřebný větší pohyb ovládacího orgánu k uvedení těchto dalších zdrojů do činnosti. |
|
2.19. |
Definice „jmenovité hodnoty“ pro referenční brzdné účinky jsou požadované k určení hodnoty přenosové funkce brzdového zařízení, která je poměrem výstupu ke vstupu, pro jednotlivá vozidla.
|
|
2.20. |
„Automaticky ovládaným brzděním“ se rozumí funkce komplexního elektronického ovládacího systému, kterou se uvádí do činnosti brzdový systém/y nebo brzdy určitých náprav za účelem vyvinout zpomalení vozidla přímým zásahem řidiče nebo bez jeho zásahu, kdy aktivování této funkce je výsledkem automatického vyhodnocení informací předaných palubním systémem vozidla. |
|
2.21. |
„Selektivním brzděním“ se rozumí funkce komplexního elektronického ovládacího systému, kterou se automatickými prostředky uvádějí do činnosti jednotlivé brzdy, přičemž zpomalení vozidla je sekundární vzhledem ke změně dynamického chování vozidla. |
|
2.22. |
„Signálem brzdění“ se rozumí logický signál, který udává brzdění, jak je specifikováno v bodě 5.2.22. |
|
2.23. |
„Signálem tísňového brzdění“ se rozumí logický signál, který udává tísňové brzdění, jak je specifikováno v bodě 5.2.23. |
|
2.24. |
„Ackermanovým úhlem řízení“ se rozumí úhel, jehož tangentou je rozvor dělený poloměrem zatáčení při velmi nízké rychlosti. |
|
2.25. |
„Systémem elektronického řízení stability“ neboli „systémem ESC“ se rozumí systém, který má všechny následující vlastnosti:
|
|
2.26. |
„Bočním zrychlením“ se rozumí složka vektoru zrychlení určitého bodu vozidla kolmá na osu x vozidla (podélnou) a rovnoběžnou s rovinou vozovky. |
|
2.27. |
„Přetáčivostí“ se rozumí stav, při kterém je rychlost stáčení vozidla větší než rychlost stáčení, ke které by došlo při rychlosti vozidla dané Ackermanovým úhlem řízení. |
|
2.28. |
„Bočním skluzem nebo úhlem bočního skluzu“ se rozumí arcustangens poměru boční rychlosti k podélné rychlosti těžiště vozidla. |
|
2.29. |
„Nedotáčivostí“ se rozumí stav, při kterém je rychlost stáčení vozidla menší než rychlost stáčení, ke které by došlo při rychlosti vozidla dané Ackermanovým úhlem řízení. |
|
2.30. |
„Rychlostí stáčení“ se rozumí rychlost změny směrového úhlu vozidla měřená ve stupních na vteřinu rotace okolo svislé osy procházející těžištěm vozidla. |
|
2.31. |
„Maximálním brzdným koeficientem“ se rozumí koeficient tření mezi pneumatikou a povrchem vozovky změřený při maximálním zpomalení valící se pneumatiky. |
|
2.32. |
„Společnou zobrazovací plochou“ se rozumí plocha, na které se může zobrazit více než jeden sdělovač, indikátor, identifikační symbol, nebo jiná zpráva, avšak nikoliv současně. |
|
2.33. |
„Faktorem statické stability“ se rozumí polovina rozchodu vozidla dělená výškou jeho těžiště, což lze vyjádřit jako SSF = T/2H, kde T = rozchod (u vozidel s více než jedním rozchodem se použije střední hodnota; u vozidel s dvojitou montáží kol se použijí k výpočtu hodnoty T vnější kola) a H = výška těžiště vozidla. |
|
2.34. |
„Brzdovým asistenčním systémem (BAS)“ se rozumí funkce brzdového systému, která ze způsobu, kterým řidič ovládá brzdění, odvodí nutnost nouzového brzdění, a v tom případě:
|
|
2.34.1. |
„Kategorií A brzdového asistenčního systému“ se rozumí systém, který detekuje stav nouzového brzdění na základě síly, kterou řidič působí na brzdový pedál. |
|
2.34.2. |
„Kategorií B brzdového asistenčního systému“ se rozumí systém, který detekuje stav nouzového brzdění na základě rychlosti, kterou řidič sešlapuje brzdový pedál. |
|
2.34.3. |
„Kategorií C brzdového asistenčního systému“ se rozumí systém, který detekuje stav nouzového brzdění na základě více kritérií, z nichž jedním musí být způsob, kterým se působí na brzdový pedál. |
3. ŽÁDOST O SCHVÁLENÍ
|
3.1. |
Žádost o schválení typu vozidla z hlediska brzdění předkládá výrobce vozidla nebo jeho řádně pověřený zástupce. |
|
3.2. |
K žádosti musí být přiloženy níže uvedené dokumenty v trojím vyhotovení a s následujícími údaji:
|
|
3.3. |
Vozidlo představující typ vozidla určeného ke schválení musí být předáno pověřené technické zkušebně provádějící zkoušky. |
4. SCHVÁLENÍ
|
4.1. |
Jestliže vozidlo, které bylo přistaveno ke schválení podle tohoto předpisu, vyhoví požadavkům podle následujících bodů 5 a 6, udělí se pro tento typ vozidla schválení. |
|
4.2. |
Každému schvalovanému typu se přidělí číslo schválení, jehož první dvě číslice udávají sérii změn, které včleňují nejposlednější závažné technické změny předpisu v době udělení schválení. Táž smluvní strana nesmí udělit totéž číslo témuž typu vozidla, vybavenému jiným typem brzdového zařízení nebo jinému typu vozidla. |
|
4.3. |
Schválení nebo odmítnutí schválení typu vozidla podle tohoto předpisu se oznámí smluvním stranám Dohody, které používají tento předpis, a to na formuláři podle vzoru v příloze 1 k tomuto předpisu a souhrnem informací, obsažených v dokumentech, uvedených v bodech 3.2.1 až 3.2.4, přičemž výkresy, dodané žadatelem o schválení, musí mít formát maximálně A4 (210 × 297 mm) nebo musí být na tento formát složeny a být ve vhodném měřítku. |
|
4.4. |
Na každém vozidle shodném s typem vozidla schváleným podle tohoto předpisu se zřetelně a na snadno přístupném místě uvedeném ve zprávě o schválení vyznačí mezinárodní značka schválení typu, která se skládá z:
|
|
4.5. |
Vyhovuje-li vozidlo typu vozidla schválenému podle jednoho nebo více dalších předpisů připojených k dohodě v zemi, která udělila schválení typu podle tohoto předpisu, není třeba symbol předepsaný v bodě 4.4.1 opakovat; v takovém případě se čísla předpisu, čísla schválení typu a doplňkové symboly všech předpisů, podle nichž bylo uděleno schválení typu ve státě, který udělil schválení typu podle tohoto předpisu, musejí umístit ve svislých sloupcích vpravo od symbolu předepsaného v bodě 4.4.1. |
|
4.6. |
Značka schválení typu musí být jasně čitelná a nesmazatelná. |
|
4.7. |
Značka schválení typu musí být umístěna v blízkosti štítku s údaji o vozidle nebo na tomto štítku. |
|
4.8. |
Příloha 2 tohoto předpisu uvádí příklady uspořádání značek schválení. |
5. POŽADAVKY
5.1. Všeobecně
5.1.1. Brzdové zařízení
|
5.1.1.1. |
Brzdové zařízení musí být konstruováno, vyrobeno a namontováno takovým způsobem, aby za normálních provozních podmínek mohlo vozidlo vyhovět ustanovením tohoto předpisu, a to i při vibracích, kterým může být vystaveno. |
|
5.1.1.2. |
Zvláště musí být brzdové zařízení konstruováno, vyrobeno a namontováno tak, aby odolávalo korozi a stárnutí, kterým je vystaveno. |
|
5.1.1.3. |
Brzdová obložení nesmějí obsahovat azbest. |
|
5.1.1.4. |
Účinnost brzdového zařízení nesmí být nepříznivě ovlivňována magnetickými nebo elektrickými poli. (To je nutno prokázat splněním požadavků předpisu č. 10 ve znění série změn 02.) |
|
5.1.1.5. |
Signál zjišťování závad může přerušit na okamžik (< 10 ms) požadovaný signál v ovládacím převodu, za předpokladu, že se tím nezmenší brzdný účinek. |
5.1.2. Funkce brzdového zařízení
Brzdové zařízení, definované v bodě 2.3 tohoto předpisu, musí splňovat následující funkce:
|
5.1.2.1. |
Systém provozního brzdění Provozní brzdění musí umožňovat ovládání pohybu vozidla a jeho zastavení bezpečným, rychlým a účinným způsobem, bez ohledu na rychlost, zatížení nebo velikost sklonu stoupání nebo klesání. Musí být odstupňovatelné. Řidič musí být schopen ovládat brzdění ze svého sedadla, aniž by sejmul ruce z ovládacího orgánu řízení. |
|
5.1.2.2. |
Systém nouzového brzdění Nouzové brzdění musí umožňovat zastavení vozidla v přiměřené vzdálenosti v případě selhání provozního brzdění. Musí být odstupňovatelné. Řidič musí být schopen takto brzdit ze svého sedadla, aniž by sejmul ruce z ovládacího orgánu řízení. Pro účely tohoto ustanovení se má za to, že současně se nemůže vyskytovat více než jedna porucha v systému provozního brzdění. |
|
5.1.2.3. |
Systém parkovacího brzdění Parkovací brzdění musí umožňovat udržet vozidlo v nehybném stavu na stoupajícím nebo klesajícím sklonu i v nepřítomnosti řidiče, přičemž brzdící součásti musí být udržovány v poloze pro zabrzdění čistě mechanickým zařízením. Řidič musí mít možnost provést toto brzdění ze svého sedadla. |
5.1.3. Požadavky přílohy 8 platí pro bezpečnostní hlediska všech komplexních elektronických systémů vozidla, které zajišťují nebo tvoří část ovládacího převodu funkcí brzdění, včetně funkcí, které používají brzdový systém/y pro automaticky ovládané brzdění nebo selektivní brzdění.
Na systémy či funkce, které využívají brzdový systém jako prostředku pro dosahování požadovaných účinků vyšší úrovně, se však příloha 8 vztahuje pouze v případě, že mají na brzdový systém přímý vliv. Je-li vozidlo takovými systémy vybaveno, nesmějí být během zkoušek brzdového systému pro schválení typu deaktivovány.
5.1.4. Ustanovení pro periodické technické prohlídky brzdových systémů
|
5.1.4.1. |
Musí být možno snadno kontrolovat stav součástí provozní brzdy, které podléhají opotřebení, např. třecí obložení a bubny nebo kotouče (u bubnů nebo kotoučů nemusí být opotřebení při periodické technické prohlídce nutně kontrolováno). Metoda k provádění výše uvedené kontroly je uvedena v bodě 5.2.11.2 tohoto předpisu. |
|
5.1.4.2. |
Musí být možné snadno ověřit správný provozní stav komplexních elektronických systémů, které řídí brzdění. Jsou-li zapotřebí zvláštní informace, musí k nim být zajištěn volný přístup.
|
|
5.1.4.3. |
Musí být možné vyvinout maximální brzdné síly za statických podmínek na setrvačníkovém dynamometru nebo na válcové zkoušečce stavu brzd. |
5.2. Vlastnosti brzdových systémů
5.2.1. Soubor brzdových zařízení, jimiž je vozidlo vybaveno, musí splňovat požadavky na provozní, nouzové a parkovací brzdění.
5.2.2. Systémy zajišťující provozní, nouzové a parkovací brzdění mohou mít společné součásti, pokud vyhoví následujícím ustanovením:
|
5.2.2.1. |
musí mít nejméně dva na sobě nezávislé ovládací orgány, které jsou řidičem snadno dosažitelné z jeho normální polohy při jízdě. Každý ovládací orgán brzd musí být konstruován tak, aby se při uvolnění vrátil do výchozí klidové polohy. Tento požadavek neplatí pro ovládací orgán parkovací brzdy, pokud je mechanicky zajištěn v poloze pro brzdění; |
|
5.2.2.2. |
ovládací orgán systému provozního brzdění musí být nezávislý na ovládacím orgánu systému parkovacího brzdění; |
|
5.2.2.3. |
vlastnosti spojení mezi ovládacím orgánem systému provozního brzdění a různými částmi převodů se nesmějí po určité době používání změnit; |
|
5.2.2.4. |
systém parkovacího brzdění musí být konstruován tak, aby se mohl uvést v činnost i za jízdy vozidla. Tento požadavek se může splnit i uvedením do činnosti, a to i jen částečné, systému provozního brzdění vozidla prostřednictvím pomocného ovládacího orgánu; |
|
5.2.2.5. |
aniž by tím byly dotčeny požadavky bodu 5.1.2.3 tohoto předpisu, systémy provozního brzdění a parkovacího brzdění mohou používat společné části v jejich převodu (převodech) za podmínky, že při poruše kterékoli části převodu (převodů) je stále zajištěno plnění požadavků na nouzové brzdění; |
|
5.2.2.6. |
při porušení kterékoliv součásti jiné, než jsou brzdy (ve smyslu bodu 2.6 tohoto předpisu), nebo součásti uvedené dále v bodě 5.2.2.10, nebo při jakékoliv jiné poruše v systému provozního brzdění (špatná funkce, částečné nebo celkové vyčerpání zásobníku energie), musí být ta část systému provozního brzdění, která není dotčena poruchou, schopna zastavit vozidlo za podmínek požadovaných pro nouzové brzdění; |
|
5.2.2.7. |
jestliže je provozní brzdění zajišťováno účinkem svalové energie řidiče posilované z jednoho nebo více zásobníků energie, musí být nouzové brzdění v případě selhání tohoto posílení zajištěno svalovou energií řidiče, posilovanou popřípadě ze zásobníků energie, které nejsou dotčeny selháním, přičemž síla na ovládací orgán nesmí přesáhnout předepsaná maxima; |
|
5.2.2.8. |
jestliže brzdná síla a převod při provozním brzdění jsou zajišťovány výhradně energií ze zásobníku, ovládanou řidičem, musí být k dispozici nejméně dva zcela nezávislé zásobníky energie, opatřené rovněž nezávislými vlastními převody; každý z nich smí působit jen na brzdy dvou nebo více kol zvolených tak, aby mohly samy zajistit nouzové brzdění za předepsaných podmínek a aniž tím bude porušena stabilita vozidla při brzdění; kromě toho každý z těchto zásobníků energie musí být opatřen výstražným zařízením definovaným dále v bodě 5.2.14; |
|
5.2.2.9. |
jestliže brzdná síla při provozním brzdění a převod jsou zajišťovány výhradně energií ze zásobníku, pokládá se jeden zásobník pro převod za postačující za podmínky, že předepsaný účinek nouzového brzdění je zajištěn svalovou energií řidiče působící na ovládací orgán provozního brzdění a že jsou splněny požadavky bodu 5.2.5; |
|
5.2.2.10. |
určité součásti, jako je pedál a jeho uchycení, hlavní válec a jeho píst nebo písty, brzdič, mechanismus spojující pedál a hlavní válec nebo brzdič, brzdové válce a jejich písty a páky a klíče brzdových ústrojí se nepovažují za sestavy součástí náchylné k porušení, pokud jsou dostatečně dimenzované, snadno přístupné pro údržbu a vykazují bezpečnostní charakteristiky přinejmenším rovnocenné těm, které jsou požadovány pro jiná důležitá ústrojí vozidel (např. táhla a páky mechanismu řízení). Jestliže selhání jediné z těchto částí by znemožnilo brzdění vozidla s účinkem odpovídajícím nejméně účinku požadovanému pro nouzové brzdění, musí být tato část z kovu nebo z materiálu s rovnocennými vlastnostmi a nesmí se při normální funkci brzdových systémů znatelně deformovat. |
5.2.3. Porucha části systému hydraulického převodu musí být signalizována řidiči zařízením, dávajícím výstražný signál červeným světlem, které se rozsvítí před tím nebo při tom, když vznikne mezi neporušeným a porušeným systémem tlakový rozdíl nepřesahující 15,5 barů, měřeno na výstupu z hlavního brzdového válce. Toto výstražné světlo musí svítit tak dlouho, dokud porucha trvá a spínač zapalovaní (spouštění) je v poloze „zapnuto“ (spouštění). Je však přípustné zařízení obsahující výstražnou signalizaci s červeným světlem, které se rozsvítí, jakmile hladina brzdové kapaliny ve své zásobní nádržce poklesne na výšku nižší, než je hodnota stanovená výrobcem. Světlo výstražného signálu musí být viditelné i za denního světla. Řidič musí mít možnost ze svého sedadla snadno ověřit správnou funkci sdělovače této signalizace. Porucha části tohoto zařízení nesmí vést k úplné ztrátě účinku brzdového zařízení. Aplikace parkovací brzdy musí být řidiči rovněž signalizována. K tomu lze užít tentýž sdělovač výstražného signálu.
5.2.4. Jestliže se používá energie jiné, než je svalová energie řidiče, není třeba použít více zdrojů této jiné energie (hydraulické čerpadlo, vzduchový kompresor atd.), ale prostředek, který je tímto zdrojem, musí být co nejspolehlivější.
|
5.2.4.1. |
V případě poruchy kterékoliv části převodu brzdového systému musí zůstat zajištěno doplňování energie pro tu část, která není dotčena poruchou, pokud je to nutné pro zastavení vozidla, s účinkem předepsaným pro nouzové brzdění. Tato podmínka musí být zajištěna zařízeními, která mohou být snadno uvedena v činnost při stojícím vozidle, nebo zařízeními s automatickou funkcí. |
|
5.2.4.2. |
Mimoto zásobníky, které jsou v okruhu za tímto zařízením, musí být takové, aby v případě poruchy doplňování energie po čtyřech plných zdvizích ovládacího orgánu provozní brzdy, za podmínek stanovených v bodě 1.2 přílohy 4 tohoto předpisu, bylo ještě možné při pátém zdvihu zastavit vozidlo s účinkem předepsaným pro nouzové brzdění. |
|
5.2.4.3. |
U hydraulických brzdových zařízení s akumulovanou energií se však mohou tyto podmínky pokládat za splněné, pokud jsou splněna ustanovení bodu 1.3 přílohy 4 tohoto předpisu. |
5.2.5. Požadavky uvedené v předchozích bodech 5.2.2, 5.2.3 a 5.2.4 musí být splněny, aniž by bylo použito jakékoli automatické zařízení takového typu, že by jeho neúčinnost nemusela být zpozorována, protože díly, které jsou normálně v klidové poloze, by vstupovaly v činnost pouze v případě poruchy brzdového zařízení.
5.2.6. Systém provozního brzdění musí působit na všechna kola vozidla a musí brzdný účinek vhodně rozdělovat mezi nápravy.
5.2.7. U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B může být brzdný výkon jiných zdrojů brzdění vhodně fázován, aby umožnil samostatnou činnost elektrického rekuperačního brzdového systému, jestliže jsou splněny obě následující podmínky:
|
5.2.7.1. |
vnitřní změny brzdného momentu systému elektrického rekuperačního brzdění (např. v důsledku změn stavu nabití trakčních baterií) jsou automaticky kompenzovány příslušnými změnami fázování, pokud jsou plněny požadavky (4) jedné z následujících příloh tohoto předpisu:
|
|
5.2.7.2. |
vždy, když je to potřebné k zajištění poměrného zpomalení (5) podle požadavku řidiče na brzdění, se musí s ohledem na adhezi mezi pneumatikou a vozovkou automaticky brzdit všemi koly vozidla. |
5.2.8. Účinek systému provozního brzdění musí být rozdělen mezi kola jedné a téže nápravy symetricky vzhledem k podélné střední rovině vozidla.
Kompenzace a funkce, jako je protiblokovací zařízení, které mohou způsobit odchylky od tohoto symetrického rozdělení, se musí uvést v prohlášení.
|
5.2.8.1. |
Kompenzace poruchy nebo závady v brzdovém systému prováděná prostřednictvím elektrického ovládacího převodu musí být signalizována řidiči žlutým výstražným signálem specifikovaným níže v bodě 5.2.21.1.2. Tento požadavek platí pro všechny stavy naložení, kdy kompenzace přesáhne následující meze:
|
|
5.2.8.2. |
Kompenzace definovaná výše je přípustná pouze v případě, kdy se začne brzdit při rychlosti vozidla větší než 10 km/h. |
5.2.9. Závady ve funkci elektrického ovládacího převodu nesmějí uvést brzdy v činnost bez úmyslu řidiče.
5.2.10. Systém provozního brzdění, systém nouzového brzdění a systém parkovacího brzdění musí působit na brzdné plochy připojené ke kolům součástmi s dostatečně pevnou konstrukcí.
Jestliže brzdný moment určité nápravy nebo náprav je vyvíjen zároveň systémem třecích brzd a systémem elektrického rekuperačního brzdění kategorie B, je přípustné odpojení tohoto rekuperačního brzdění za podmínky, že systém třecích brzd zůstane trvale v činnosti a že je schopný zajistit kompenzace uvedené v bodě 5.2.7.1.
V případě přechodných krátkodobých odpojení je však přípustná neúplná kompenzace, avšak tato kompenzace musí dosáhnout během jedné sekundy nejméně 75 % své konečné hodnoty.
V každém případě trvale připojený zdroj třecího brzdění musí zajistit, že provozní i nouzové brzdové systémy budou nadále v činnosti s předepsaným stupněm účinnosti.
Pokud jde o systém parkovacího brzdění, oddělení brzdných povrchů je umožněno pouze za podmínky, že je toto oddělení ovládáno výhradně řidičem, který je na svém sedadle, a to systémem, který není možno uvést do činnosti únikem příslušného média.
5.2.11. Opotřebení brzd musí být možno snadno vyrovnávat ručním nebo automatickým vyrovnávacím systémem. Kromě toho musí mít ovládací orgán a součásti převodu a brzd rezervu zdvihu, a pokud je to potřebné, vhodné zařízení pro její vyrovnání tak, aby po zahřátí brzd nebo po určitém stupni opotřebení obložení byl zajištěn brzdný účinek, aniž by bylo nutno ihned provést seřízení.
5.2.11.1. Vyrovnávání opotřebení obložení musí být pro provozní brzdy automatické. Automatická vyrovnávací zařízení musí být taková, aby po zahřátí, po němž následuje ochlazení brzd, zůstalo stále zajištěno účinné brzdění. Vozidlo musí zejména zůstat schopno normálního provozu po zkouškách podle bodu 1.5 přílohy 3 (zkouška typu I).
5.2.11.2. Kontrola opotřebení třecích součástí provozní brzdy
|
5.2.11.2.1. |
Musí být možné snadno zkontrolovat toto opotřebení obložení provozních brzd, a to zvnějšku nebo zespodu vozidla, bez sejmutí kol, prostřednictvím vhodných kontrolních otvorů nebo jiným způsobem. Tuto kontrolu musí být možné provést při použití jednoduchého standardního dílenského nářadí nebo běžného vybavení ke kontrole vozidel. Jako alternativa je přijatelné snímací zařízení na každém kole (dvojitá kola se považují za jedno kolo), které varuje řidiče na jeho místě k řízení vozidla, když je nutno vyměnit obložení. V případě optického výstražného zařízení je možno použít žlutý výstražný signál specifikovaný v dále uvedeném bodě 5.2.21.1.2. |
|
5.2.11.2.2. |
Zhodnocení stavu opotřebení třecích ploch brzdových kotoučů nebo bubnů se musí provádět pouze přímým měřením vlastních součástí nebo prozkoumáním indikátorů opotřebení ve všech kotoučích nebo bubnech, což může vyžadovat určitý stupeň demontáže. Výrobce vozidla proto musí při schválení typu uvést:
Tyto údaje musí být volně dostupné, například v příručce pro vozidlo nebo na elektronickém nosiči dat. |
5.2.12. U brzdových zařízení s hydraulickým převodem musí být snadno přístupné plnicí otvory kapalinových nádržek; kromě toho musí být nádržky, obsahující zásobu kapaliny, konstruovány a vyrobeny tak, aby dovolovaly snadnou kontrolu hladiny zásobní kapaliny, aniž by bylo zapotřebí je otevřít. Minimální celkový objem nádržky se musí rovnat výtlaku kapaliny, ke kterému dojde, když se přesunou všechny písty brzdových válečků, jak v kolech u bubnových brzd, tak i ve třmenech u kotoučových brzd, zásobovaných kapalinou z dané nádržky, z polohy při úplném odbrzdění a při novém obložení do polohy při plném zabrzdění a při zcela opotřebeném obložení. Není-li splněna tato poslední podmínka, musí zařízení pro výstražnou signalizaci s červeným světlem specifikované v bodě 5.2.21.1.1 upozornit řidiče na pokles hladiny zásoby kapaliny, který je schopen způsobit selhání brzdového zařízení.
5.2.13. Druh kapaliny, kterou je nutno použít v brzdových zařízeních s hydraulickým převodem, musí být udán symbolem podle obrázku 1 nebo 2 normy ISO 9128-1987 a příslušným označením DOT (např. DOT 3). Symbol a označení podle obrázku 1 nebo 2 musí být vyznačeny nesmazatelným způsobem na viditelném místě do vzdálenosti 100 mm od plnicích hrdel kapalinových nádržek; výrobce může doplnit další informativní údaje.
5.2.14. Výstražné zařízení
|
5.2.14.1. |
Každé vozidlo, které je vybaveno provozní brzdou uváděnou v činnost energií ze zásobníku energie, musí být opatřeno výstražným zařízením pro případ, že nelze s touto brzdou dosáhnout účinku předepsaného pro nouzové brzdění bez energie ze zásobníku. Toto výstražné zařízení signalizuje opticky nebo akusticky, že hladina energie v kterékoli části systému poklesla na hodnotu, při které, bez doplňování zásobníků a při všech stavech naložení vozidla, zůstává ještě možné, po čtyřech plných zdvizích ovládacího orgánu pro provozní brzdění, obdržet při pátém zdvihu účinek předepsaný pro nouzové brzdění (přičemž v převodu provozní brzdy není závada a brzdová ústrojí jsou seřízena na co nejmenší zdvih). Výstražné zařízení musí být zapojeno přímo a trvalým způsobem do okruhu. Pokud motor pracuje v normálních provozních podmínkách a na brzdovém zařízení nejsou závady, jako je tomu při zkouškách schválení typu vozidla, nesmí výstražné zařízení dávat signál s výjimkou doby potřebné k doplnění zásobníků energie po nastartování motoru. Jako optická výstražné signalizace se použije červený výstražný signál specifikovaný v bodě 5.2.21.1.1. |
|
5.2.14.2. |
Avšak u vozidel, která se pokládají za vozidla splňující ustanovení bodu 5.2.4.1 tohoto předpisu pouze vzhledem k tomu, že splňují požadavky bodu 1.3 přílohy 4, musí výstražné zařízení obsahovat navíc k optickému zařízení také akustické zařízení. Obě tato zařízení nemusí být v činnosti současně za podmínky, že obě zařízení splňují výše uvedené požadavky a že akustický signál nevstupuje do činnosti dříve než optický signál. Jako optická výstražné signalizace se použije červený výstražný signál specifikovaný v bodě 5.2.21.1.1. |
|
5.2.14.3. |
Toto akustické zařízení může být vyřazeno z činnosti při aplikaci parkovacího brzdění a/nebo – podle volby výrobce – je-li ve vozidle s automatickou převodovkou páka předvoliče v poloze „parkování“. |
5.2.15. Bez ohledu na požadavky, které ukládá výše uvedený bod 5.1.2.3, jestliže pro funkci některého z brzdových systémů je nezbytný přídavný zdroj energie, musí být zásoba energie taková, aby v případě zastavení motoru nebo v případě poruchy pohonu zdroje energie zůstal účinek brzdění postačující k zastavení vozidla za předepsaných podmínek. Kromě toho, jestliže je svalové působení řidiče na systém parkovacího brzdění zesilováno posilovačem, musí být činnost parkovacího brzdění zajištěna v případě poruchy tohoto posilovače, je-li nutné i s využitím zásoby energie nezávislé na energii, která normálně zajišťuje toto posílení. Tato zásoba energie může být zásobou energie určenou pro systém provozního brzdění.
5.2.16. Pneumatické nebo hydraulické vedlejší spotřebiče musí být zásobované energií tak, aby se při jejich činnosti mohlo dosáhnout předepsaných hodnot zpomalení a aby i v případě poškození zdroje energie nemohly vedlejší spotřebiče způsobit, že zásoby energie plnící brzdové systémy poklesnou pod úroveň uvedenou výše v bodě 5.2.14.
5.2.17. Motorová vozidla vybavená k tažení přívěsu s elektrickými provozními brzdami musí splňovat následující požadavky:
|
5.2.17.1. |
zdroje elektrického napájení motorového vozidla (generátor a baterie) musí mít dostatečnou kapacitu, aby mohly napájet elektrický brzdový systém. Když motor běží ve volnoběhu s otáčkami doporučenými výrobcem a všechna elektrická zařízení, která výrobce montuje sériově, jsou v činnosti, napětí v elektrických okruzích při největším proudu v systému elektrického brzdění (15 A) nesmí poklesnout pod 9,6 V, přičemž tato hodnota se měří v místě napojení. Elektrické okruhy nesmějí mít možnost zkratování ani v případě přetížení; |
|
5.2.17.2. |
v případě poruchy systému provozního brzdění na motorovém vozidle, kde brzdový systém má nejméně dva na sobě nezávislé okruhy, okruh nebo okruhy, jež nejsou dotčeny poruchou, musí umožňovat uvést v činnost brzdový systém přívěsu s částečným nebo plným brzdným účinkem; |
|
5.2.17.3. |
použití spínače a okruhu brzdových světel pro ovládání systému elektrického brzdění je přípustné pouze tehdy, pokud je ovládací vodič zapojen paralelně s brzdovým světlem a spínač a okruh brzdových světel, které jsou na vozidle, snesou toto zatížení navíc. |
5.2.18. Doplňkové požadavky na vozidla s elektrickými rekuperačními brzdovými systémy
|
5.2.18.1. |
Vozidla s elektrickým rekuperačním brzdovým systémem kategorie A
|
|
5.2.18.2. |
Vozidla s elektrickým rekuperačním brzdovým systémem kategorie B
|
|
5.2.18.3. |
Pro vozidla s elektrickým rekuperačním brzdovým systémem obou kategorií platí všechna příslušná ustanovení, s výjimkou ustanovení bodu 5.2.18.1.1 výše. V tom případě může být elektrické rekuperační brzdění ovládáno akcelerátorem a/nebo neutrální polohou v převodovce. Kromě toho působením na ovládací orgán provozního brzdění se nesmí zmenšit výše uvedený brzdný účinek generovaný uvolněním ovladače akcelerátoru. |
|
5.2.18.4. |
Činnost elektrického brzdění nesmí být nepříznivě ovlivňována magnetickými nebo elektrickými poli. |
|
5.2.18.5. |
U vozidel s protiblokovacím zařízením musí protiblokovací zařízení řídit elektrický brzdový systém. |
|
5.2.18.6. |
Stav nabití trakčních baterií se určí metodou stanovenou v dodatku 1 k příloze 3 tohoto předpisu (6). |
5.2.19. Zvláštní doplňkové požadavky na elektrický převod systému parkovacího brzdění
|
5.2.19.1. |
Při poruše v elektrickém převodu se musí zabránit jakémukoli nezamýšlenému uvedení systému parkovacího brzdění v činnost. |
|
5.2.19.2. |
Při elektrické poruše v ovládacím orgánu nebo při přerušení kabeláže v elektrickém ovládacím převodu, který je mezi ovládacím orgánem a elektronickou řídicí jednotkou, která je s ním přímo spojena, s vyloučením napájení energií, musí být nadále možné uvést do činnosti systém parkovacího brzdění ze sedadla řidiče a udržet jím naložené vozidlo ve stojícím stavu na stoupajícím nebo klesajícím sklonu 8 %. Alternativně je v tomto případě přípustné u stojícího vozidla automatické uvedení parkovací brzdy do činnosti za podmínky, že se dosáhne výše uvedený účinek a že parkovací brzda, jakmile byla jednou uvedena do činnosti, zůstane nadále v činnosti nezávisle na poloze spínače zapalování (startování). Při této alternativě se musí parkovací brzda automaticky uvolnit, jakmile řidič začne uvádět vozidlo opět do pohybu. K dosažení výše uvedeného účinku nebo k podílení se na jeho dosažení je možno také použít motor a ručně řazenou převodovku nebo automatickou převodovku (v parkovací poloze).
|
|
5.2.19.3. |
Vedlejší spotřebič může být napájen energií prostřednictvím elektrického převodu systému parkovacího brzdění za podmínky, že přívod energie je dostatečný, aby umožnil uvádět do činnosti systém parkovacího brzdění navíc ke všem ostatním elektrickým spotřebičům vozidla v bezporuchovém stavu. Kromě toho, když zásoba energie slouží také pro systém provozního brzdění, platí požadavky bodu 5.2.20.6; |
|
5.2.19.4. |
Když se vypne spínač pro zapalování a spouštění, kterým se ovládá elektrické napájení brzdového zařízení, a/nebo se vyjme klíček, musí být nadále možné zabrzdit vozidlo systémem parkovacího brzdění, zatímco nesmí být možné vozidlo odbrzdit. |
5.2.20. Zvláštní doplňkové požadavky na systémy provozního brzdění s elektrickým ovládacím převodem
|
5.2.20.1. |
Systém provozního brzdění musí být při uvolněné parkovací brzdě schopen vyvinout statickou celkovou brzdnou sílu rovnající se nejméně brzdné síle požadované při zkoušce typu 0, a to i když byl vypnut spínač zapalování/startování a/nebo byl vyjmut klíček. Přitom se rozumí, že v převodu energie systému provozního brzdění je dostatečné množství energie. |
|
5.2.20.2. |
Při jediné dočasné poruše (< 40 ms) v elektrickém ovládacím převodu, s výjimkou jeho přívodu energie (např. nepředaný signál nebo chyba v datech) nesmí dojít k žádnému patrnému ovlivnění účinku provozního brzdění. |
|
5.2.20.3. |
Porucha v elektrickém ovládacím převodu (7), s výjimkou jeho zásoby energie, která ovlivňuje funkci a účinky systémů stanovených tímto předpisem, musí být signalizována řidiči výstražným zařízením s červeným nebo žlutým světlem, specifikovaným v bodech 5.2.21.1.1 a 5.2.21.1.2, podle případu. Pokud již nelze dosáhnout účinku předepsaného pro provozní brzdění (červený výstražný signál), musí být poruchy vzniklé přerušením elektrického spojení (např. lom, rozpojení) signalizovány řidiči ihned, jakmile vznikly, a musí se dosáhnout brzdného účinku předepsaného pro nouzové brzdění při působení na ovládací orgán provozního brzdění podle bodu 2.2 přílohy 3 tohoto předpisu. |
|
5.2.20.4. |
V případě poruchy zdroje energie pro elektrický ovládací převod, musí být zajištěn plný ovládací rozsah systému provozního brzdění po dvaceti za sebou následujících plných zdvizích ovládacího orgánu provozního brzdění, počínaje jmenovitou hodnotou hladiny energie. V průběhu zkoušky se ovládací orgán brzdění při každé aplikaci plně sešlápne na dobu 20 sekund a uvolní na dobu 5 sekund. Rozumí se, že v průběhu výše uvedené zkoušky je množství energie v převodu energie dostačující, aby se zajistilo plné ovládání systému provozního brzdění. Tento požadavek se nesmí pokládat za výjimku z uplatnění požadavků přílohy 4. |
|
5.2.20.5. |
Pokud napětí baterie poklesne pod hodnotu uvedenou výrobcem, při které již dále nelze zajistit účinek předepsaný pro provozní brzdění a/nebo při které se znemožní, aby nejméně dvěma nezávislými okruhy systému provozního brzdění mohlo být dosaženo účinku, který je předepsaný pro nouzové brzdění, musí být aktivován červený výstražný signál specifikovaný v bodě 5.2.21.1.1. Po tom, co vstoupila v činnost výstražná signalizace, musí být možné působením na ovládací orgán provozního brzdění dosáhnout alespoň brzdný účinek nouzového brzdění předepsaný v bodě 2.2 přílohy 3 tohoto předpisu. Přitom se rozumí, že v převodu energie systému provozního brzdění je dostatečné množství energie. |
|
5.2.20.6. |
Jestliže se do vedlejších spotřebičů přivádí energie ze stejné zásoby jako do elektrického ovládacího převodu, musí být zajištěno, aby při motoru běžícím s otáčkami nepřesahujícími 80 % otáček maximálního výkonu byl přívod energie dostatečný k dosažení předepsaných hodnot zpomalení pomocí buď zdroje energie schopného zabránit vyčerpání této zásoby, když jsou všechny pomocné spotřebiče v činnosti, nebo automatickým vypnutím předvolených vedlejších spotřebičů, jakmile napětí překročí kritický práh uvedený v bodě 5.2.20.5 tohoto předpisu, čímž se zabrání dalšímu čerpání této zásoby. Dodržení tohoto požadavku se může prokázat výpočtem nebo praktickou zkouškou. Tento bod neplatí pro vozidla, u kterých je možné dosáhnout předepsané hodnoty zpomalení bez použití elektrické energie. |
|
5.2.20.7. |
Jestliže se do pomocných zařízení přivádí energie z elektrického ovládacího převodu, musí se splnit následující požadavky:
|
5.2.21. Všeobecné požadavky na optickou výstražnou signalizaci, jejíž funkcí je signalizovat řidiči určité specifické poruchy (nebo závady) v brzdovém zařízení motorového vozidla, nebo popřípadě jeho přípojného vozidla, jsou uvedeny v následujících bodech. Na rozdíl od toho, co je uvedeno dále v bodě 5.2.21.5, se tato signalizace musí použít výhradně pro účely stanovené tímto předpisem.
|
5.2.21.1. |
U motorových vozidel musí být zajištěna následující optická výstražná signalizace poruch a závad brzd:
|
|
5.2.21.2. |
Výstražné signály musí být viditelné i za denního světla. Řidič sedící na svém sedadle musí mít možnost snadno si ověřit jejich správnou funkci. Porucha součásti ve výstražných zařízeních nesmí mít za následek žádné zmenšení účinku brzdových systémů. |
|
5.2.21.3. |
Pokud není uvedeno jinak:
|
|
5.2.21.4. |
Výše uvedený výstražný signál / výstražné signály se musí rozsvítit, když je elektrické zařízení vozidla (a brzdové zařízení) uvedeno pod napětí. Brzdové zařízení u stojícího vozidla ověří, že se nevyskytuje žádná specifikovaná porucha nebo závada, dříve než výstražné signály zhasnou. Specifikované poruchy nebo závady, které mají uvést v činnost výše uvedené výstražné signály a které přitom nejsou u stojícího vozidla rozpoznatelné, se musí uložit do paměti po jejich rozpoznání a musí být signalizovány při spouštění motoru a vždy když je spínač zapalování (spouštění) v zapnuté poloze, a to tak dlouho, dokud porucha nebo závada trvá. |
|
5.2.21.5. |
Nespecifikované poruchy (nebo závady) nebo jiné informace týkající se brzd a/nebo podvozku motorového vozidla mohou být signalizovány žlutým světlem specifikovaným výše v bodě 5.2.21.1.2 za předpokladu, že jsou splněny všechny následující podmínky:
|
5.2.22. Signalizace brzdění prostřednictvím rozsvícení brzdových svítilen
|
5.2.22.1. |
Uvedení systému provozního brzdění do činnosti působením řidiče musí vyvolat signál, kterým se rozsvítí brzdové svítilny. |
|
5.2.22.2. |
Uvedení systému provozního brzdění do činnosti „automaticky ovládaným brzděním“ musí vyvolat výše uvedený signál. Pokud je ovšem vzniklé zpomalení menší než 0,7 m/s2, může být signál přerušen (8). |
|
5.2.22.3. |
Uvedení části systému provozního brzdění prostřednictvím „selektivního brzdění“ do činnosti nesmí výše uvedený signál vyvolat (9). |
|
5.2.22.4. |
Systémy elektrického rekuperačního brzdění, které způsobí zpomalující sílu uvolněním pedálu akcelerátoru, nesmějí výše uvedený signál vyvolat. |
5.2.23. Jestliže je vozidlo vybaveno zařízením k signalizaci nouzového brzdění, musí uvedení do činnosti a vyřazení z činnosti signálu nouzového brzdění splňovat následující požadavky.
|
5.2.23.1. |
Signál se musí uvést do činnosti tím, že se použije systém provozního brzdění a dosáhne se s ním zpomalení nejméně 6 m/s2. Signál se musí vyřadit z činnosti nejpozději, jakmile zpomalení poklesne pod 2,5 m/s2. |
|
5.2.23.2. |
Signál může být uveden do činnosti nebo vyřazen z činnosti také za následujících podmínek:
Signál se musí vyřadit z činnosti, jakmile protiblokovací systém již plně necykluje. |
5.2.24. Při platnosti požadavků bodů 12.2 a 12.3 musí každé vozidlo opatřené systémem ESC, který splňuje definici podle bodu 2.25, splňovat požadavky na zařízení, vlastnosti a zkoušky obsažené v části A přílohy 9 tohoto předpisu.
|
5.2.24.1. |
Alternativně k požadavku bodu 5.2.24 mohou být vozidla kategorií M1 a N1 s provozní hmotností vyšší než 1 735 kg vybavena stabilizační funkcí vozidla, která zahrnuje opatření proti převrácení a směrové řízení a splňuje technické požadavky přílohy 21 předpisu č. 13. |
5.2.25. Motorová vozidla kategorií M1 a N1 vybavená náhradními koly/pneumatikami pro dočasné použití musí splňovat příslušné technické požadavky přílohy 3 předpisu č. 64.
6. ZKOUŠKY
Zkoušky brzdění, kterým se musí podrobit vozidla předaná ke schválení, jakož i požadované brzdné účinky, jsou popsány v příloze 3 tohoto předpisu.
7. ZMĚNY TYPU VOZIDLA NEBO JEHO BRZDOVÉHO ZAŘÍZENÍ A ROZŠÍŘENÍ SCHVÁLENÍ TYPU
|
7.1. |
Každá změna typu vozidla nebo jeho brzdového zařízení se musí oznámit orgánu státní správy, který udělil schválení typu vozidla. Tento orgán může buď:
|
|
7.2. |
Potvrzení schválení, rozšíření nebo odmítnutí schválení se oznámí stranám dohody, které používají tento předpis, podle postupu ve výše uvedeném bodě 4.3. |
|
7.3. |
Příslušný orgán, který udělí rozšíření schválení, přidělí každému osvědčení o takovém rozšíření pořadové číslo. |
8. SHODNOST VÝROBY
Postupy k ověření shodnosti výroby musejí odpovídat postupům uvedeným v dohodě, dodatek 2 (E/ECE/324 – E/ECE/TRANS/505/Rev.2), přičemž se uplatňují tyto požadavky:
|
8.1. |
každé vozidlo schválené dle tohoto předpisu musí být vyrobeno tak, aby se shodovalo se schváleným typem tím, že splňuje ustanovení výše uvedeného bodu 5; |
|
8.2. |
orgán, který schválení typu udělil, může kdykoliv ověřit metody kontroly shodnosti uplatňované v jednotlivých výrobních závodech. Běžná četnost takových ověření je jednou za dva roky. |
9. POSTIHY ZA NESHODNOST VÝROBY
|
9.1. |
Schválení udělené v souladu s tímto předpisem, pokud jde o typ vozidla, lze odejmout v případě, že nejsou dodržovány požadavky podle bodu 8.1 výše. |
|
9.2. |
Pokud smluvní strana dohody uplatňující tento předpis odejme schválení, kterou dříve udělila, musí o tom ihned informovat osvědčením na formuláři dle vzoru v příloze 1 tohoto předpisu ostatní smluvní strany, které uplatňují tento předpis. |
10. DEFINITIVNÍ UKONČENÍ VÝROBY
Pokud držitel schválení zcela ukončí výrobu typu vozidla, které bylo schváleno podle tohoto předpisu, oznámí to orgánu státní správy, který schválení udělil. Na základě tohoto oznámení tento orgán o tom informuje ostatní smluvní strany dohody, které uplatňují tento předpis, a to výtiskem osvědčení o schválení podle vzoru v příloze 1 tohoto předpisu.
11. NÁZVY A ADRESY TECHNICKÝCH ZKUŠEBEN ODPOVĚDNÝCH ZA PROVÁDĚNÍ SCHVALOVACÍCH ZKOUŠEK, NÁZVY A ADRESY SPRÁVNÍCH ORGÁNŮ
Strany dohody, které uplatňují tento předpis, sdělí sekretariátu organizace Spojených národů názvy a adresy pověřených technických zkušeben odpovědných za provádění schvalovacích zkoušek a orgánů státní správy, které udělují schválení a kterým se zasílají osvědčení o schválení nebo o rozšíření nebo o odmítnutí nebo o odejmutí schválení, vydané v ostatních státech.
12. PŘECHODNÁ USTANOVENÍ
|
12.1. |
V průběhu 24 měsíců, které následují po vstupu v platnost doplňku 5 k původnímu znění tohoto předpisu, musí smluvní strany, které uplatňují tento předpis, pokračovat v udělování schválení EHK podle nezměněného předpisu. |
|
12.2. |
Od 1. listopadu 2011 mohou smluvní strany, které uplatňují tento předpis, odmítnout udělit nové vnitrostátní nebo regionální schválení typu, jestliže typ vozidla nesplňuje požadavky tohoto předpisu ve znění doplňku 9 a není vybaven systémem elektronického řízení stability a brzdovým asistenčním systémem, které oba splňují požadavky přílohy 9 tohoto předpisu. |
|
12.3. |
Od 1. listopadu 2013 mohou smluvní strany, které uplatňují tento předpis, odmítnout první vnitrostátní registraci vozidla, které nesplňuje požadavky tohoto předpisu ve znění doplňku 9 a které není vybaveno systémem elektronického řízení stability a brzdovým asistenčním systémem, které oba splňují požadavky přílohy 9 tohoto předpisu. |
|
12.4. |
Od data vstupu v platnost doplňku 9 k původnímu znění tohoto předpisu, smluvní strany, které uplatňují tento předpis:
|
|
12.5. |
Smluvní strany, které uplatňují tento předpis, musí nadále udělovat schválení pro typy vozidel, které splňují požadavky tohoto předpisu ve znění doplňku 6 k původnímu znění tohoto předpisu. |
(1) Tento předpis nabízí soustavu požadavků pro kategorii vozidel N1, které jsou odlišné od požadavků uvedených v předpise č. 13. Smluvní strany, které uplatňují tento předpis i předpis č. 13 uznávají, že schválení podle jednoho či druhého předpisu mají stejnou platnost. Kategorie vozidel M1 a N1 jsou definovány v příloze 7 úplného usnesení o konstrukci vozidel (R.E.3) (dokument TRANS/WP.29/78/Rev.1/Amend.2, naposledy pozměněný dokumentem Amend.4).
(2) Skupina náprav je posuzována jako jednoduchá náprava a dvojité kolo jako kolo jednoduché.
(3) 1 pro Německo, 2 pro Francii, 3 pro Itálii, 4 pro Nizozemsko, 5 pro Švédsko, 6 pro Belgii, 7 pro Maďarsko, 8 pro Českou republiku, 9 pro Španělsko, 10 pro Srbsko, 11 pro Spojené království, 12 pro Rakousko, 13 pro Lucembursko, 14 pro Švýcarsko, 15 (neobsazeno), 16 pro Norsko, 17 pro Finsko, 18 pro Dánsko, 19 pro Rumunsko, 20 pro Polsko, 21 pro Portugalsko, 22 pro Ruskou federaci, 23 pro Řecko, 24 pro Irsko, 25 pro Chorvatsko, 26 pro Slovinsko, 27 pro Slovensko, 28 pro Bělorusko, 29 pro Estonsko, 30 (neobsazeno), 31 pro Bosnu a Hercegovinu, 32 pro Lotyšsko, 33 (neobsazeno), 34 pro Bulharsko, 35 (neobsazeno), 36 pro Litvu, 37 pro Turecko, 38 (neobsazeno), 39 pro Ázerbájdžán, 40 pro Bývalou jugoslávskou republiku Makedonii, 41 (neobsazeno), 42 pro Evropské společenství (schválení udělují členské státy, přičemž použijí svůj příslušný symbol EHK), 43 pro Japonsko, 44 (neobsazeno), 45 pro Austrálii, 46 pro Ukrajinu, 47 pro Jihoafrickou republiku, 48 pro Nový Zéland, 49 pro Kypr, 50 pro Maltu, 51 pro Korejskou republiku, 52 pro Malajsii, 53 pro Thajsko, 54 a 55 (neobsazeno) a 56 pro Černou Horu. Dalším zemím se přidělí po sobě následující čísla chronologicky v pořadí, v jakém ratifikují Dohodu o přijetí jednotných technických pravidel pro kolová vozidla, zařízení a části, které se mohou montovat a/nebo užívat na kolových vozidlech, a o podmínkách pro vzájemné uznávání schválení typu udělených na základě těchto pravidel, nebo v pořadí, v jakém k uvedené dohodě přistoupí. Takto přidělená čísla sdělí generální tajemník Organizace spojených národů smluvním stranám dohody.
(4) Orgán, který uděluje schválení, musí mít možnost zkontrolovat systém provozního brzdění doplňkovými zkouškami.
(5) Viz pozn. pod čarou č. 3.
(6) Po dohodě s technickou zkušebnou není zhodnocení stavu nabití vyžadováno pro vozidla, která mají na palubě zdroj energie k dobíjení trakčních baterií a prostředky pro regulaci jejich stavu nabití.
(7) Do doby, než se dohodnou jednotné zkušební metody, musí výrobce seznámit technickou zkušebnu s analýzou případných závad v řídicím zařízení/ch a s jejich důsledky. Tyto informace budou projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(8) Dodržení těchto požadavků musí být při schválení potvrzeno výrobcem vozidla.
(9) Během „selektivního brzdění“ se funkce může změnit na „automaticky řízené brzdění“.
PŘÍLOHA 1
OZNÁMENÍ (1)
(maximální formát: A4 (210 × 297 mm))
(1) Na žádost žadatele/(žadatelů o schválení v souladu s předpisem č. 90 musí být informace uvedené v dodatku 1 k této příloze poskytnuty orgánem, který provádí schválení typu. Tyto informace však nesmí být používány k jiným účelům než ke schválení podle předpisu č. 90.
DODATEK 1
Seznam údajů o vozidle pro účely schvalování podle předpisu č. 90
|
1. |
Popis typu vozidla: …
|
|
2. |
Značka a typ brzdových obložení: …
|
|
3. |
Minimální hmotnost vozidla: …
|
|
4. |
Maximální hmotnost vozidla: …
|
|
5. |
Maximální rychlost vozidla: … |
|
6. |
Rozměry pneumatik a kol: … |
|
7. |
Rozdělení brzdového systému na okruhy (např. na přední a zadní nápravu, diagonální): … |
|
8. |
Prohlášení o tom, co tvoří systém nouzového brzdění: … |
|
9. |
Specifikace brzdičů (pokud jsou na vozidle): …
|
|
10. |
Konstrukční rozdělení brzdných sil: … |
|
11. |
Specifikace brzd: …
|
|
12. |
Druh a velikost hlavního válce: … |
|
13. |
Druh a velikost posilovače: … |
PŘÍLOHA 2
USPOŘÁDÁNÍ ZNAČEK SCHVÁLENÍ TYPU
VZOR A
(Viz bod 4.4 tohoto předpisu)
Výše uvedená značka schválení umístěná na vozidle udává, že typ tohoto vozidla byl z hlediska brzdění schválen ve Spojeném království (E11) podle předpisu č. 13-H pod číslem schválení 002439. První dvě číslice čísla schválení znamenají, že schválení bylo uděleno dle požadavků předpisu č. 13-H v jeho původním znění. Doplňkové označení „ESC“ udává, že vozidlo splňuje požadavky na elektronické řízení stability a na brzdový asistenční systém stanovené v příloze 9 tohoto předpisu.
VZOR B
(Viz bod 4.5 tohoto předpisu)

Výše uvedená značka schválení umístěná na vozidle udává, že typ tohoto vozidla byl schválen ve Spojeném království (E11) podle předpisů č. 13-H a č. 24 (1). (V případě posledně uvedeného předpisu je korigovaná hodnota součinitele absorpce 1,30 m-1). Čísla schválení udávají, že k datům, kdy byla příslušná schválení udělena, byl předpis č. 13-H ve svém původním znění a předpis č. 24 byl ve znění své série změn 02.
(1) Toto číslo je uváděno pouze pro příklad.
PŘÍLOHA 3
ZKOUŠKY BRZD A ÚČINEK BRZDOVÝCH SYSTÉMŮ
1. ZKOUŠKY BRZDĚNÍ
1.1 Všeobecně
|
1.1.1 |
Účinek předepsaný pro brzdové systémy je určen brzdnou dráhou a středním plným brzdným zpomalením. Účinek brzdového systému je určen naměřenou brzdnou dráhou vztaženou k počáteční rychlosti vozidla a/nebo středním plným brzdným zpomalením naměřeným v průběhu zkoušky. |
|
1.1.2 |
Brzdná dráha je dráha, kterou vozidlo ujede od okamžiku, kdy řidič začne působit na ovládací prvek brzdového systému, až do okamžiku, kdy se vozidlo zastaví; počáteční rychlost je rychlost v okamžiku, kdy řidič začne působit na ovládací orgán brzdového systému; počáteční rychlost nesmí být nižší než 98 % rychlosti předepsané pro příslušnou zkoušku. Střední plné brzdné zpomalení (dm) se vypočítá jako střední zpomalení, které je funkcí vzdálenosti ujeté v intervalu vb až ve, podle následujícího vzorce:,
kde:
Rychlost a dráha se zjišťují přístroji s přesností ±1 % při předepsané zkušební rychlosti. Hodnota dm může být určena jinými způsoby než měřením rychlosti a dráhy; v takovém případě se dm musí určit s přesností ±3 %. |
1.2 Pro schválení každého vozidla se měří účinek brzdění při silničních zkouškách provedených za následujících podmínek:
|
1.2.1 |
vozidlo musí odpovídat podmínkám pro hmotnost, uvedeným pro každý typ zkoušky; tyto podmínky se musí uvést v protokolu o zkoušce; |
|
1.2.2 |
zkoušet se musí při rychlostech, které jsou stanoveny pro každý typ zkoušky; jestliže je nejvyšší konstrukční rychlost vozidla nižší než rychlost předepsaná pro zkoušku, zkouší se při nejvyšší rychlosti vozidla; |
|
1.2.3 |
síla, kterou se působí na ovládací orgán během zkoušky k dosažení předepsaného účinku, nesmí překročit nejvyšší stanovenou hodnotu; |
|
1.2.4 |
s výhradou jiných ustanovení uvedených v příslušných přílohách musí mít vozovka povrch s dobrými adhezními vlastnostmi; |
|
1.2.5 |
zkoušky se provedou jen tehdy, pokud výsledky nemohou být ovlivněny větrem; |
|
1.2.6 |
na počátku zkoušky musí být pneumatiky studené a nahuštěné na tlak, předepsaný na skutečné zatížení kol u stojícího vozidla; |
|
1.2.7 |
předepsaného účinku se musí dosáhnout bez blokování kol při rychlostech přesahujících 15 km/h, aniž by přitom vozidlo vybočilo z pruhu širokého 3,5 m nebo překročilo úhel stáčení 15o, a bez abnormálních vibrací; |
|
1.2.8 |
u vozidel poháněných zcela nebo zčásti elektromotorem/elektromotory trvale spojeným s koly se vždy zkouší s tímto elektromotorem/elektromotory zapojeným/i; |
|
1.2.9 |
u vozidel se systémem elektrického rekuperačního brzdění kategorie A popsaných v bodě 1.2.8 se zkoušky chování vozidla uvedené v bodě 1.4.3.1 této přílohy provedou na zkušební dráze s nízkým součinitelem adheze (definovaným v bodě 5.2.2 přílohy 6);
|
|
1.2.10 |
blokování kol není během zkoušek uvedených v bodech 1.2.9 a 1.2.9.1 přípustné. Jsou však dovoleny korekce řízení, pokud úhlové natočení volantu je menší než 120o během dvou počátečních sekund a celkem nepřesáhne 240o; |
|
1.2.11 |
u vozidel s elektricky ovládanými provozními brzdami napájenými z trakčních baterií (nebo z pomocné baterie), které získávají energii jen z nezávislého vnějšího nabíjecího systému, musí být tyto baterie v průběhu zkoušek brzdných účinků ve stavu nabití v průměru ne o více než 5 % vyšším, než je stav, při kterém musí být spuštěn výstražný signál poruchy brzd předepsaný v bodě 5.2.20.5. Jestliže došlo ke spuštění tohoto signálu, je přípustné mírné dobití baterií v průběhu zkoušek tak, aby zůstaly v požadovaném rozsahu stavu nabití. |
1.3 Chování vozidla při brzdění
|
1.3.1 |
Při brzdných zkouškách, zejména při zkouškách při vysokých rychlostech, je nutné zhodnotit celkové chování vozidla během brzdění. |
|
1.3.2 |
Chování vozidla v průběhu brzdění na vozovce se sníženou adhezí musí splňovat příslušné požadavky uvedené v příloze 5 a/nebo 6 tohoto předpisu.
|
1.4 Zkouška typu 0 (základní zkouška účinnosti brzd za studena)
1.4.1 Všeobecně
|
1.4.1.1 |
Průměrná teplota provozních brzd na nejvíce zahřáté nápravě vozidla měřená uvnitř brzdových obložení nebo na brzdné ploše kotouče nebo bubnu musí být před každým brzděním mezi 65 a 100 °C. |
|
1.4.1.2 |
Zkoušky musí být provedeny za následujících podmínek:
|
1.4.2 Zkouška typu 0 s odpojeným motorem, provozní brzdění podle bodu 2.1.1.A této přílohy
Zkouška se musí provést při předepsané rychlosti. Pro číselné hodnoty této rychlosti je přípustná určitá tolerance. Musí být dosaženo minimální předepsané účinnosti.
1.4.3 Zkouška typu 0 se zapojeným motorem, provozní brzdění podle bodu 2.1.1.B této přílohy
|
1.4.3.1 |
Zkouška se provádí se zapojeným motorem při rychlosti předepsané v bodě 2.1.1.B této přílohy. Musí být dosaženo minimální předepsané účinnosti. Tato zkouška se neprovádí, pokud je maximální rychlost vozidla ≤ 125 km/h. |
|
1.4.3.2 |
Změří se maximální skutečná účinnost při brzdění, přičemž chování vozidla musí splňovat požadavky bodu 1.3.2 této přílohy. Jestliže však je maximální rychlost vozidla větší než 200 km/h, zkouší se při rychlosti 160 km/h. |
1.5 Zkouška typu I (zkouška ztráty brzdného účinku a jeho obnovení)
1.5.1 Postup zahřívání
|
1.5.1.1 |
Systémy provozního brzdění všech vozidel se musí zkoušet řadou následných brzdění a uvolnění brzd naloženého vozidla podle podmínek uvedených v následující tabulce:
kde:
|
|||||||||||||||||||||||||||
|
1.5.1.2 |
Jestliže vlastnosti vozidla nedovolují dodržet předepsanou dobu Δt, je možno tuto dobu prodloužit; v každém případě musí být v každém cyklu kromě času potřebného pro brzdění a zrychlení vozidla k dispozici 10 sekund na stabilizaci rychlosti v1. |
|
1.5.1.3 |
Pro tyto zkoušky musí být síla působící na ovládací orgán regulována tak, aby se při každém brzdění dosáhlo středního brzdného zpomalení 3 m/s2; jsou možné dvě přípravné zkoušky, aby se určila příslušná síla působící na ovládací orgán. |
|
1.5.1.4 |
Během brzdění musí zůstat trvale zařazen nejvyšší rychlostní stupeň (s výjimkou rychloběhu atd.). |
|
1.5.1.5 |
Při zvyšování rychlosti po brzdění se musí převodovka použít tak, aby se dosáhlo rychlosti v1 v nejkratší možné době (maximální zrychlení, které umožňuje motor a převodovka). |
|
1.5.1.6 |
U vozidel, která nejsou schopna provádět samostatně cykly zahřívání brzd, se zkouší při prvním brzdění při předepsané rychlosti a pak se využije maximální zrychlení, kterého je vozidlo schopné, k opětnému dosažení rychlosti a následně se brzdí vždy z rychlosti dosažené na konci každého cyklu trvajícího 45 sekund. |
|
1.5.1.7 |
U vozidel se systémem elektrického rekuperačního brzdění kategorie B musí být stav baterií na začátku zkoušky takový, aby podíl brzdné síly vyvíjený systémem elektrického rekuperačního brzdění nepřesáhl minimum, které zaručuje konstrukce systému. Tento požadavek se pokládá za splněný, jestliže baterie jsou v jednom ze stavů nabití uvedených výše v bodě 1.4.1.2.3. |
1.5.2 Brzdný účinek se zahřátou brzdou
|
1.5.2.1 |
Na konci zkoušky typu I (popsané v bodě 1.5.1 této přílohy) se změří účinek systému provozního brzdění se zahřátými brzdami za stejných podmínek (a zejména při střední hodnotě síly na ovládací orgán, jež není větší než střední hodnota síly, která se skutečně použila), jako při zkoušce typu 0 s odpojeným motorem (odlišné mohou být teplotní podmínky). |
|
1.5.2.2 |
Tento účinek se zahřátými brzdami nesmí být menší než 75 % (2) předepsaného účinku a ani menší než 60 % hodnoty zjištěné při zkoušce typu 0 s odpojeným motorem. |
|
1.5.2.3 |
U vozidel s elektrickým rekuperačním brzdovým systémem kategorie A musí být během jednotlivých brzdění trvale zařazen nejvyšší rychlostní stupeň a nesmí se použít zvláštní ovladač elektrického rekuperačního brzdění, pokud je na vozidle,. |
|
1.5.2.4 |
U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B se po provedení zahřívacích cyklů podle bodu 1.5.1.6 této přílohy musí zkoušet se zahřátými brzdami při maximální rychlosti, které vozidlo může dosáhnout na konci zahřívacích cyklů, jestliže není možno dosáhnout rychlost stanovenou v bodě 2.1.1.A této přílohy. Pro porovnání se zopakuje zkouška typu 0 se studenými brzdami při téže rychlosti a s podobným podílem elektrického rekuperačního brzdění daným příslušným stavem nabití baterie, jako byl podíl při zkoušce se zahřátými brzdami. Po procesu znovuobnovení vlastností a po zkoušce je přípustné další znovuobnovení vlastností obložení předtím, než se provede zkouška k porovnání výsledků této druhé zkoušky brzdných účinků se studenými brzdami s účinky dosaženými ve zkoušce se zahřátými brzdami s použitím kritérií stanovených v bodech 1.5.2.2 nebo 1.5.2.5 této přílohy. |
|
1.5.2.5 |
S vozidlem, které splňuje požadavek na 60 % účinku uvedeného v bodě 1.5.2.2, avšak nemůže splnit požadavek na 75 % (3) činku dle bodu 1.5.2.2, se může provést další zkouška účinku se zahřátými brzdami, přičemž se na ovládací orgán působí silou, jež nepřesahuje hodnotu uvedenou v bodě 2 této přílohy. Výsledky obou zkoušek se uvedou ve zkušebním protokolu. |
1.5.3 Postup obnovení brzdného účinku
Bezprostředně po zkoušce brzdného účinku se zahřátými brzdami se čtyřikrát zabrzdí z 50 km/h se zapojeným motorem, se středním zpomalením 3 m/s2. Mezi začátky za sebou následujících zabrzdění se ponechá interval 1,5 km. Ihned po každém zabrzdění se vozidlo zrychlí tak, aby dosáhlo co nejdříve rychlosti 50 km/h a tato rychlost se udržuje až do následujícího zabrzdění.
|
1.5.3.1 |
Vozidla s elektrickým rekuperačním brzdovým systémem kategorie B mohou mít baterie znovu nabité nebo nahrazené nabitou sadou, aby se mohl dokončit postup obnovení brzdného účinku. |
1.5.4 Obnovený brzdný účinek
Na konci postupu obnovení brzdného účinku je třeba změřit obnovený brzdný účinek systému provozního brzdění za stejných podmínek jako při zkoušce typu 0 s odpojeným motorem (přičemž teplotní podmínky mohou být rozdílné), a to s použitím střední síly působící na ovládací orgán, která není větší než střední ovládací síla použitá v odpovídající zkoušce typu 0.
Tento obnovený brzdný účinek nesmí být ani menší než 70 %, ani větší než 150 % hodnoty zjištěné při zkoušce typu 0 s odpojeným motorem.
|
1.5.4.1 |
U vozidel s elektrickým rekuperačním brzdovým systémem kategorie B se provede zkouška obnovení brzdného účinku bez složek elektrického rekuperačního brzdění, tj. za podmínek stanovených výše v bodě 1.5.4. Po znovuobnovení vlastností brzdového obložení musí být podruhé provedena zkouška 0, a to ze stejné rychlosti a bez přispění elektrického rekuperačního brzdění jako při zkoušce obnovení brzdného účinku s odpojeným motorem, a provede se srovnání výsledků těchto dvou zkoušek. Tento obnovený brzdný účinek nesmí být ani menší než 70 %, ani větší než 150 % hodnoty zjištěné při konečné opakované zkoušce typu 0. |
2. ÚČINEK BRZDOVÝCH SYSTÉMŮ
2.1 Systém provozního brzdění
|
2.1.1 |
Provozní brzdy musí být zkoušeny za podmínek uvedených v následující tabulce:
kde:
|
|
2.1.2 |
Pokud je u vozidla povoleno tažení nebrzděného přívěsu, nesmí být minimální účinnost soupravy při zkoušce 0 nižší než 5,4 m/s2, a to za podmínek naloženého i nenaloženého vozidla. Brzdný účinek jízdní soupravy se ověří výpočtem z maximálního brzdného účinku, kterého se skutečně dosáhlo se samotným (naloženým) motorovým vozidlem při zkoušce typu 0 s odpojeným motorem, a to podle následujícího vzorce (praktické zkoušky se zapojeným nebrzděným přívěsem nejsou požadovány):,
kde:
|
2.2 Systém nouzového brzdění
|
2.2.1 |
Účinek systému nouzového brzdění se zkouší zkouškou typu 0 s odpojeným motorem, z počáteční rychlosti vozidla 100 km/h a se silou působící na ovládací orgán provozního brzdění nejméně 6,5 daN a nejvýše 50 daN. |
|
2.2.2 |
Se systémem nouzového brzdění se musí dosáhnout brzdná dráha nepřesahující následující hodnotu: 0,1 v + 0,0158 v2 (m) a střední plné brzdné zpomalení nejméně 2,44 m/s2 (což odpovídá druhému členu výše uvedeného vzorce). |
|
2.2.3 |
Účinek nouzového brzdění se zkouší prostřednictvím simulování podmínek skutečné poruchy v systému provozního brzdění. |
|
2.2.4 |
U vozidel s elektrickými rekuperačními brzdovými systémy se rovněž musí ověřit brzdný účinek při následujících dvou druzích poruch:
|
2.3 Systém parkovacího brzdění
|
2.3.1 |
Systém parkovacího brzdění musí udržet stojící naložené vozidlo na stoupání nebo klesání o sklonu 20 %. |
|
2.3.2 |
U vozidel, která se smějí spojit s přípojným vozidlem, musí systém parkovacího brzdění motorového vozidla udržet stojící jízdní soupravu na stoupání nebo klesání o sklonu 12 %. |
|
2.3.3 |
Jestliže je ovládání ruční, síla působící na ovládací orgán nesmí přesáhnout 40 daN. |
|
2.3.4 |
Jestliže je ovládání nožní, síla působící na ovládací orgán nesmí přesáhnout 50 daN. |
|
2.3.5 |
Lze připustit systém parkovacího brzdění, u kterého je nutno ovládací úkon opakovat několikrát, než se dosáhne předepsaného účinku. |
|
2.3.6 |
Pro ověření, že jsou splněny požadavky bodu 5.2.2.4 tohoto předpisu, se musí provést zkouška typu 0 s odpojeným motorem při počáteční rychlosti 30 km/h. Při brzdění působením na ovládací orgán systému parkovacího brzdění nesmí být střední plné brzdné zpomalení a brzdné zpomalení těsně před zastavením vozidla menší než 1,5 m/s2. Zkouší se s naloženým vozidlem. Síla, kterou se působí na ovládací orgán, nesmí překročit předepsané hodnoty. |
3. DOBA NÁBĚHU BRZDĚNÍ
3.1 U všech vozidel, kde systém provozního brzdění používá plně nebo částečně jiné zdroje energie než svalovou sílu řidiče, musí být splněny následující požadavky:
|
3.1.1 |
při rychlém brzdění musí být doba, která uplyne mezi okamžikem, kdy se počne působit na ovládací orgán, a okamžikem, kdy brzdná síla na nápravě umístěné z hlediska náběhu brzdění nejnepříznivěji dosáhne hodnoty odpovídající předepsanému účinku, rovna nejvýše 0,6 s; |
|
3.1.2 |
u vozidel s hydraulickými brzdovými systémy se požadavky výše uvedeného bodu 3.1.1 pokládají za splněné, jestliže při rychlém brzdění dosáhne zpomalení vozidla nebo tlak v nejnepříznivěji umístěném brzdovém válečku do 0,6 sekund hodnot odpovídajících předepsanému brzdnému účinku. |
(1) Výrobce musí technické zkušebně poskytnout soubor brzdných křivek, které připouští použitá strategie ovládání. Tyto křivky mohou být technickou zkušebnou zkontrolovány.
(2) Tato hodnota odpovídá brzdné vzdálenosti 0,1 v + 0,0080 v2 a střednímu plnému brzdnému zpomalení 4,82 m/s2.
(3) Tato hodnota odpovídá brzdné vzdálenosti 0,1 v + 0,0080 v2 a střednímu plnému brzdnému zpomalení 4,82 m/s2.
DODATEK
POSTUP SLEDOVÁNÍ STAVU NABITÍ BATERIE
Tento postup platí pro baterie vozidel, které se používají k trakci a k rekuperačnímu brzdění.
Postup vyžaduje použití dvousměrného watthodinového elektroměru pro stejnosměrný proud.
1. POSTUP
|
1.1 |
Jestliže jsou baterie nové nebo byly dlouhodobě skladovány, musí se s nimi provést cykly doporučené výrobcem. Po dokončení cyklů se musí odstavit na dobu nejméně 8 hodin při běžné teplotě okolí. |
|
1.2 |
Baterie se úplně nabijí podle postupu doporučeného výrobcem. |
|
1.3 |
Při provádění zkoušek brzdění podle bodů 1.2.11, 1.4.1.2.3, 1.5.1.6, 1.5.1.7 a 1.5.2.4 přílohy 3 se zaznamenají watthodiny spotřebované trakčními motory a dodané rekuperačním brzdovým systémem jako souhrn za jízdu, který se pak použije k určení stavu nabití na začátku nebo na konci určité zkoušky. |
|
1.4 |
K reprodukování stavu nabití baterií pro porovnávací zkoušky, jako jsou zkoušky prováděné podle bodu 1.5.2.4, se baterie buď dobijí na tento stav, nebo se nabijí na vyšší úroveň, a pak se vybijí přibližně konstantním zatížením až na požadovaný stav nabití. Alternativně se u vozidel, která mají jen elektrickou trakci napájenou z baterie, může stav nabití upravit jízdou vozidla. Zkoušky, na jejichž začátku je baterie jen částečně nabitá, se musí začít co nejdříve po dosažení požadovaného stavu nabití. |
PŘÍLOHA 4
Ustanovení pro zdroje a zásobníky energie (akumulátory energie)
Hydraulické brzdové systémy s akumulovanou energií
1. KAPACITA ZÁSOBNÍKŮ ENERGIE (AKUMULÁTORŮ ENERGIE)
1.1 Všeobecně
|
1.1.1 |
Vozidla, u nichž brzdové zařízení vyžaduje použití akumulované energie dodávané tlakovou kapalinou, musí být vybavena zásobníky energie (akumulátory energie) o kapacitě splňující požadavky bodu 1.2 nebo 1.3 této přílohy. |
|
1.1.2 |
Pro zásobníky energie se však nepředepisuje kapacita, je-li brzdový systém takový, že bez jakékoli zásoby energie je možné dosáhnout ovládacím orgánem pro provozní brzdění účinku nejméně rovného účinku předepsanému pro systém nouzového brzdění. |
|
1.1.3 |
Při ověřování, zda jsou splněny požadavky bodů 1.2, 1.3 a 2.1 této přílohy, musí být brzdy seřízeny na co nejmenší zdvih a ovládání musí být takové, aby, pokud jde o bod 1.2 této přílohy, byl mezi jednotlivými sešlápnutími brzdového pedálu na plný zdvih interval nejméně 60 s. |
1.2 Vozidla s hydraulickým brzdovým systémem s akumulovanou energií musí splňovat následující požadavky:
|
1.2.1 |
po osmi sešlápnutích pedálu pro provozní brzdění s plným zdvihem musí být ještě možné, při devátém sešlápnutí, dosáhnout účinku předepsaného pro nouzové brzdění; |
|
1.2.2 |
zouší se podle následujících požadavků:
|
1.3 Vozidla s hydraulickým brzdovým systémem s akumulovanou energií, která nemohou splnit požadavky bodu 5.2.4.1 tohoto předpisu, se pokládají za vyhovující ustanovením tohoto bodu, pokud splňují následující požadavky:
|
1.3.1 |
po jakékoli poruše v převodu musí být ještě možné, po osmi plných zdvizích ovládacího orgánu pro provozní brzdění, dosáhnout při devátém zdvihu nejméně účinku předepsaného pro nouzové brzdění. |
|
1.3.2 |
Zkouší se podle následujících požadavků:
|
2. VÝKONNOST ZDROJŮ TLAKOVÉ KAPALINY
2.1 Zdroje tlakové kapaliny musí splňovat požadavky uvedené v následujících bodech.
2.1.1 Definice
|
2.1.1.1 |
„p1“ znamená nejvyšší provozní tlak systému v akumulátoru (akumulátorech) – (tlak, při kterém regulátor vypíná doplňování), určený výrobcem. |
|
2.1.1.2 |
„p2“ znamená tlak, kterého se dosáhne po čtyřech plných zdvizích ovládacího orgánu provozního brzdění, z výchozího tlaku p1, bez doplňování akumulátoru (akumulátorů). |
|
2.1.1.3 |
„t“ znamená dobu potřebnou pro to, aby tlak v akumulátorech vzrostl z hodnoty p2 na hodnotu p1, bez použití ovládacího orgánu brzdění. |
2.1.2 Podmínky měření
|
2.1.2.1 |
Při zkoušce k určení doby t musí být dodávka zdroje energie (výtlak čerpadla) taková, jaká je při motoru běžícím s otáčkami, odpovídajícími jeho největšímu výkonu, nebo s nejvyššími regulovanými otáčkami. |
|
2.1.2.2 |
Při zkoušce k určení doby t se nesmí akumulátor/y vedlejších spotřebičů izolovat jinak než automaticky. |
2.1.3 Výklad výsledků
|
2.1.3.1 |
U všech vozidel nesmí doba t přesáhnout 20 s. |
3. CHARAKTERISTIKY ZAŘÍZENÍ PRO VÝSTRAŽNOU SIGNALIZACI
Při zastaveném motoru a počínaje tlakem, který může být určen výrobcem, avšak nesmí přesáhnout tlak, při kterém regulátor zapíná jeho doplňování, nesmí výstražné zařízení vstoupit v činnost po provedení dvou plných zdvihů ovládacího orgánu pro provozní brzdění.
(1) Počáteční tlak se uvede v dokumentu o schválení.
PŘÍLOHA 5
ROZLOŽENÍ BRZDNÝCH SIL MEZI NÁPRAVY VOZIDEL
1. VŠEOBECNĚ
Vozidla, která nejsou vybavena protiblokovacím zařízením, jak je definováno v příloze 6, musí splňovat všechny požadavky této přílohy. Je-li užito zvláštní zařízení, musí pracovat automaticky.
2. ZNAČKY
|
i |
= |
index označení nápravy (i = 1, přední náprava; i = 2, druhá náprava) |
|
Pi |
= |
normálová reakce povrchu vozovky působící na nápravu i ve statickém stavu |
|
Ni |
= |
normálová reakce vozovky na nápravu i při brzdění |
|
Ti |
= |
brzdná síla na nápravě i při brzdění za běžných brzdných podmínek na vozovce |
|
fi |
= |
Ti/Ni, adheze využitá nápravou i (1) |
|
J |
= |
zpomalení vozidla |
|
g |
= |
gravitační zrychlení g = 9,81 m/s2 |
|
z |
= |
poměrně brzdná síla vozidla = J/g |
|
P |
= |
hmotnost vozidla |
|
h |
= |
výška těžiště nad vozovkou, specifikovaná výrobcem a potvrzená technickou zkušebnou provádějící schvalovací zkoušku |
|
E |
= |
rozvor |
|
k |
= |
teoretický součinitel adheze mezi pneumatikou a vozovkou |
3. POŽADAVKY
|
3.1.A |
Pro všechny stavy naložení vozidla musí být křivka využití adheze přední nápravou situována nad křivkou využití adheze zadní nápravou (2): pro všechna poměrná brzdná zpomalení v rozsahu hodnot mezi 0,15 až 0,8. |
|
3.1.B |
Pro hodnoty „k“ mezi 0,2 a 0,8 (2): z ≥ 0,1 + 0,7 (k – 0,2) (viz diagram 1 této přílohy). |
|
3.2. |
Pro ověření, že jsou splněny požadavky bodu 3.1 této přílohy, musí výrobce předložit křivky využití adheze přední a zadní nápravou, sestrojené z hodnot vypočítaných dle těchto vzorců:
Křivky se musí sestrojit pro oba následující stavy zatížení:
|
4. POŽADAVKY, KTERÉ JE TŘEBA SPLNIT PŘI SELHÁNÍ SYSTÉMU PRO ROZDĚLOVÁNÍ BRZDNÝCH SIL MEZI NÁPRAVY
Jsou-li požadavky této přílohy splněny zvláštním zařízením (např. ovládaným mechanicky od zavěšení náprav vozidla), musí být v případě poruchy ovládání tohoto zařízení (např. odpojením ovládacího pákoví) možno zastavit vozidlo, za podmínek zkoušky typu 0 s odpojeným motorem, na brzdné dráze nepřesahující 0,1 v + 0,0100 v2 (m) a se středním plným brzdným zpomalením nejméně 3,86 m/s2.
5. ZKOUŠENÍ VOZIDLA
Zkušebna odpovědná za provádění schvalovacích zkoušek ověří při schvalovacích zkouškách typu vozidla, zda jsou splněny požadavky této přílohy, a to následujícími zkouškami:
5.1. Zkouška pořadí blokování kol (viz dodatek 1)
Pokud zkouška pořadí blokování kol potvrdí, že se přední kola blokují dříve než zadní kola nebo současně s nimi, ověřilo se, že požadavky oddílu 3 této přílohy byly splněny a zkouška se pokládá za splněnou.
5.2. Doplňkové zkoušky
Pokud zkouška pořadí blokování kol ukáže, že se zadní kola blokují dříve než přední kola, pak:
|
a) |
vozidlo se podrobí následujícím doplňkovým zkouškám:
|
|
b) |
odmítne se schválení typu pro tento typ vozidla. |
5.3. Výsledky praktických zkoušek se přiloží ke zkušebnímu protokolu zkoušky schválení typu.
6. SHODNOST VÝROBY
|
6.1. |
Při kontrolách shodnosti výroby použijí pověřené zkušebny odpovědné za provádění schvalovacích zkoušek tytéž postupy jako u schválení typu. |
|
6.2. |
Požadavky jsou tedy stejné jako u schválení typu, s výjimkou toho, že ve zkoušce uvedené v bodě 5.2 písm. a) bodě ii) této přílohy musí křivka pro zadní nápravu ležet pod přímkou z = 0,9 k pro všechna poměrná brzdná zpomalení mezi 0,15 a 0,8 (místo toho, aby splňovala požadavek bodu 3.1.A) (viz diagram 2). |
DIAGRAM 1
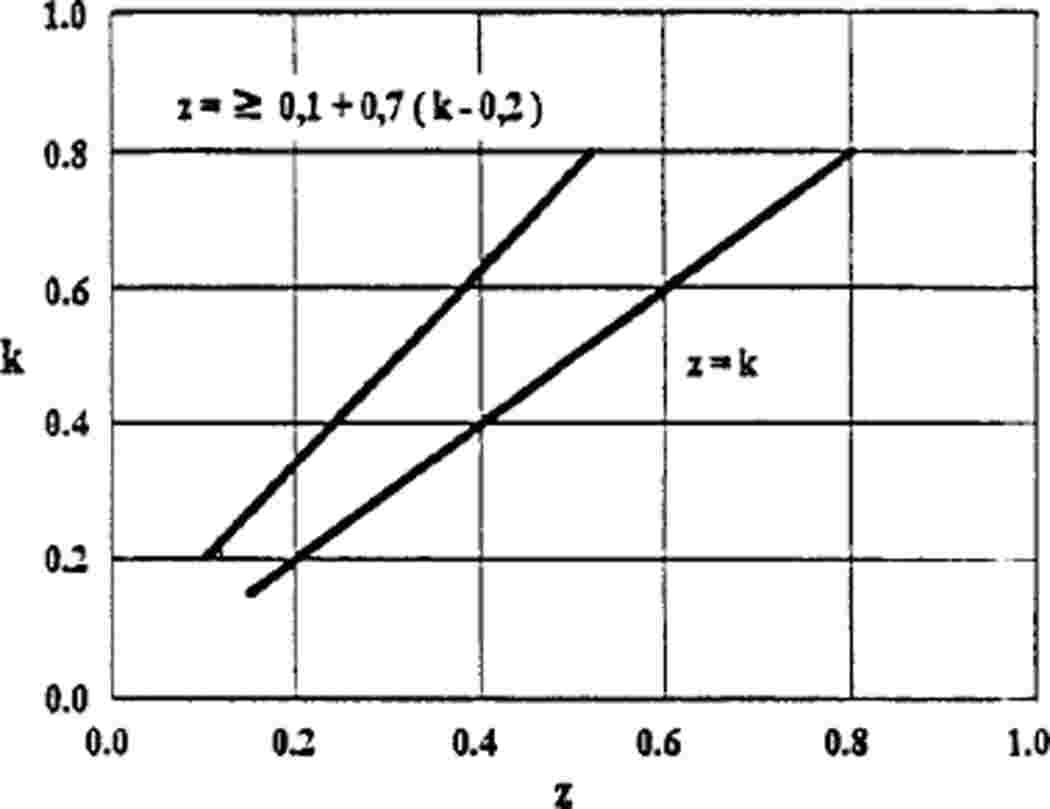
DIAGRAM 2
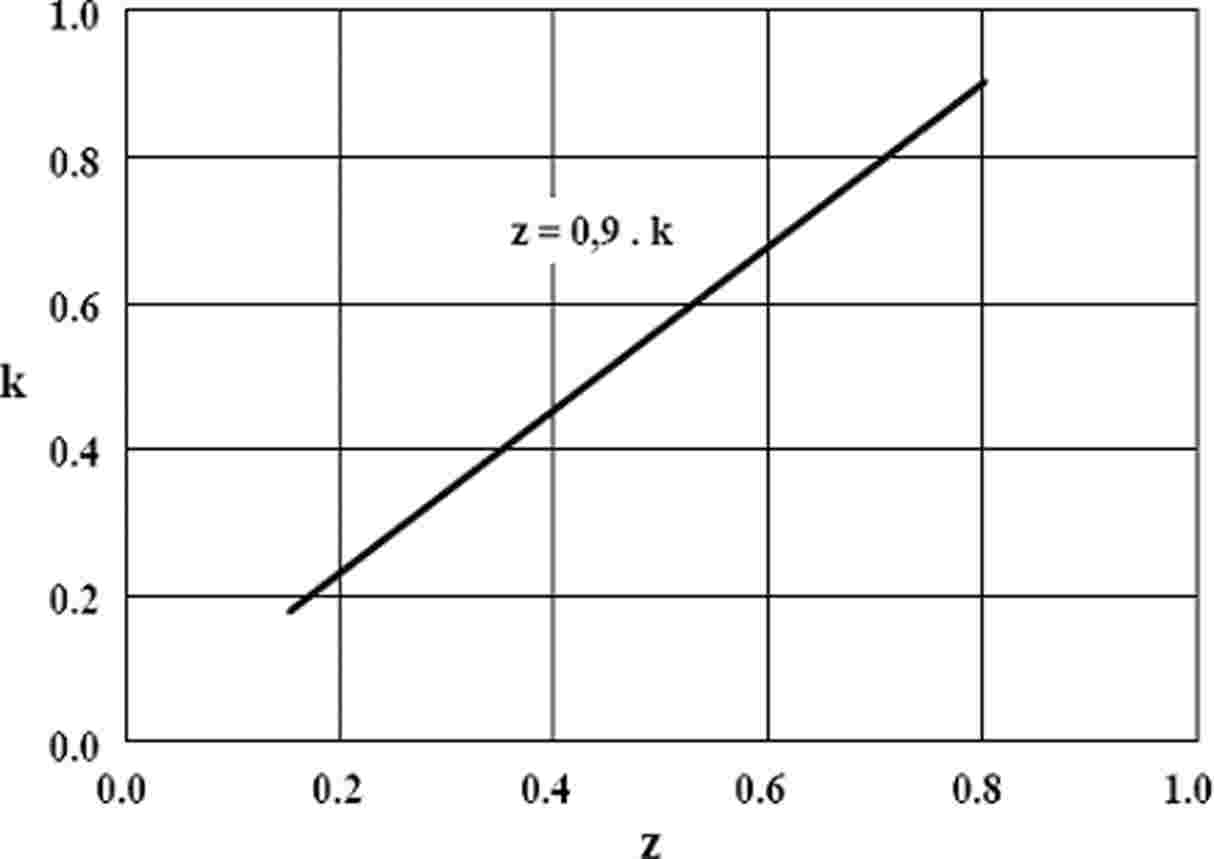
(1) „Křivkami využití adheze“ vozidla se rozumí křivky, které pro stanovené naložení vozidla udávají využití adheze každou z náprav i v závislosti na poměrném zpomalení vozidla.
(2) Ustanovení bodu 3.1 nemají vliv na požadavky přílohy 3 tohoto předpisu, pokud jde o účinnost brzdění. Pokud se však při ověřování provedeném podle ustanovení bodu 3.1 dosáhne větší účinků brzdění, než je předepsána v příloze 3, uplatní se požadavky týkající se křivek využití adheze v oblastech znázorněných na obrázku 1, které jsou definovány přímkami k = 0,8 a z = 0,8.
DODATEK 1
METODA ZKOUŠKY POŘADÍ BLOKOVÁNÍ KOL
1. VŠEOBECNÁ USTANOVENÍ
|
a) |
Účelem této zkoušky je potvrdit, že k blokování obou předních kol dochází při menších poměrných brzdných zpomaleních než k blokování obou zadních kol, když se zkouší na vozovkách, na nichž kola blokují při poměrných brzdných zpomaleních mezi 0,15 a 0,8. |
|
b) |
Za současné blokování předních a zadních kol se pokládá situace, kdy časové rozmezí mezi blokováním posledního (druhého) kola zadní nápravy a blokováním posledního (druhého) kola přední nápravy je menší než 0,1 sekundy při rychlostech vozidel větších než 30 km/h. |
2. STAV VOZIDLA
|
a) |
Zatížení vozidla: naložené a nenaložené |
|
b) |
Zařazení převodového stupně: motor odpojen |
3. ZKUŠEBNÍ PODMÍNKY A POSTUP
|
a) |
Počáteční teplota brzd: průměrně mezi 65 °C až 100 °C na nejvíce zahřáté nápravě. |
|
b) |
|
|
c) |
Síla působící na pedál:
|
|
d) |
Blokování kol: uvažují se blokování kol pouze při rychlostech vozidla nad 15 km/h. |
|
e) |
Povrch zkušební dráhy: zkouší se na zkušebních vozovkách, na nichž dochází k blokování kol při poměrných brzdných zpomaleních mezi 0,15 a 0,8. |
|
f) |
Údaje, které mají být zaznamenány: následující údaje se musejí registrovat automaticky a současně, nepřetržitě v celém průběhu každé dílčí zkoušky, tak aby se mohly hodnoty proměnných vždy vztáhnout k určitému času:
|
|
g) |
Každá dílčí zkouška se jednou zopakuje, aby se potvrdilo pořadí blokování kol: pokud jeden z těchto dvou výsledků nesplní požadavek, je rozhodující třetí zkouška za stejných podmínek. |
4. POŽADAVKY NA ÚČINNOST
|
a) |
Žádné ze zadních kol se nesmí blokovat před blokováním obou předních kol při poměrných brzdných zpomaleních vozidla mezi 0,15 a 0,8. |
|
b) |
Pokud při zkouškách podle výše uvedeného postupu a při poměrných brzdných zpomaleních vozidla mezi 0,15 a 0,8 vozidlo splňuje jedno z následujících kritérií, pokládá se tento požadavek na pořadí blokování kol za splněný:
|
|
c) |
Když blokování kol začne při poměrném brzdném zpomalení menším než 0,15 a větším než 0,8, zkouška je neplatná a musí se opakovat na jiném povrchu vozovky. |
|
d) |
Když se, ať již při vozidle naloženém nebo nenaloženém, při poměrném brzdném zpomalení vozidla mezi 0,15 a 0,8, blokují obě kola zadní nápravy a jedno nebo žádné kolo přední nápravy, nejsou požadavky zkoušky pořadí blokování kol splněny. V tomto případě se ke zjištění objektivních údajů o brzdách k výpočtu hodnot pro sestrojení křivek využití adheze musí vozidlo zkoušet s „dynamometrickými koly“. |
DODATEK 2
METODA ZKOUŠKY S DYNAMOMETRICKÝMI KOLY
1. VŠEOBECNÁ USTANOVENÍ
Účelem této zkoušky je zjistit měřením faktory vnitřního převodu brzd a tak určit využití adheze přední a zadní nápravou v rozmezí poměrného brzdného zpomalení mezi 0,15 a 0,8.
2. STAV VOZIDLA
|
a) |
Zatížení vozidla: naložené a nenaložené |
|
b) |
Zařazení převodového stupně: motor odpojen |
3. ZKUŠEBNÍ PODMÍNKY A POSTUP
|
a) |
Počáteční teplota brzd: průměrně mezi 65 °C až 100 °C na nejvíce zahřáté nápravě. |
|
b) |
Zkušební rychlosti: 100 km/h a 50 km/h |
|
c) |
Síla působící na pedál: síla na pedál se zvětšuje lineárně s růstem mezi 100 až 150 N/s pro zkušební rychlost 100 km/h nebo s růstem mezi 100 až 200 N/s pro zkušební rychlost 50 km/h, dokud se nezačnou blokovat kola určité nápravy jako první nebo do dosažení síly na pedál 1 kN, podle toho, k čemu dojde nejdříve. |
|
d) |
Chlazení brzd: mezi jednotlivými brzděními jede vozidlo rychlostmi až do 100 km/h, až se dosáhne počáteční teploty brzd specifikované ve výše uvedeném bodě 3 písm. a). |
|
e) |
Počet dílčích zkoušek: s nenaloženým vozidlem se pětkrát zabrzdí z rychlosti 100 km/h a pětkrát se zabrzdí z rychlosti 50 km/h, přičemž po každém zabrzdění se střídají tyto dvě zkušební rychlosti. S naloženým vozidlem se opakuje pět zabrzdění z každé z uvedených rychlostí, které se mezi sebou střídají. |
|
f) |
Povrch zkušební dráhy: tato zkouška se vykoná na zkušební dráze s povrchem umožňujícím dobrou adhezi. |
|
g) |
Údaje, které mají být zaznamenány: následující údaje se musejí registrovat automaticky a současně, nepřetržitě v celém průběhu každé dílčí zkoušky, tak aby se mohly hodnoty proměnných vždy vztáhnout k určitému času:
|
|
h) |
Frekvence záznamu údajů: všechny přístroje k záznamu a registraci údajů musí pracovat s frekvencí záznamu nejméně 40 Hz na všech kanálech. |
|
i) |
Určení tlaku v brzdách přední nápravy v porovnání s tlakem v brzdách zadní nápravy: určí se poměr tlaků v brzdách přední nápravy a brzdách zadní nápravy v celém rozmezí tlaků v brzdovém zařízení. Pokud vozidlo nemá systém s proměnným rozdělováním tlaků na nápravy, určí se tento poměr statickými zkouškami. Když má vozidlo systém s proměnným rozdělováním tlaků na nápravy, provedou se dynamické zkoušky s naloženým i nenaloženým vozidlem. Patnáctkrát se zabrzdí při každém z obou stavů naložení, za stejných počátečních podmínek, které jsou specifikovány v tomto dodatku |
4. ZPRACOVÁNÍ DAT
|
a) |
Data z každého brzdění předepsaného v bodě 3 písm. e) se filtrují s použitím pětibodového středěného klouzavého průměru pro údaje ze všech kanálů. |
|
b) |
Pro každé brzdění předepsané v bodě 3 písm. e) výše se z lineární rovnice určené metodou nejmenších čtverců, která popisuje co nejlépe závislost změřeného brzdného momentu každého brzděného kola na změřeném tlaku kapaliny v okruhu téhož kola, stanoví směrnice této závislosti (faktor vnitřního převodu brzdy) a hodnota na ose tlaků, při které se kolo začne blokovat. V této regresní analýze se použijí pouze hodnoty brzdného momentu zjištěné z dat změřených, když zpomalení vozidla bylo v rozmezí 0,15 g až 0,80 g. |
|
c) |
Vypočítají se průměrné hodnoty výsledků zjištěných podle písmene b) a z nich se pak vypočte průměrný vnitřní převod brzdy a průměrný tlak, při němž se kolo začne blokovat, pro všechna brzdění a pro přední nápravu. |
|
d) |
Vypočítají se průměrné hodnoty výsledků zjištěných podle písmene b) a z nich se pak vypočte průměrný vnitřní převod brzdy a průměrný tlak, při němž se kolo začne blokovat, pro všechna brzdění a pro zadní nápravu. |
|
e) |
S použitím poměru tlaků v okruzích brzd přední a zadní nápravy stanoveného podle bodu 3 písm. i) a dynamického poloměru valení pneumatik se vypočítá brzdná síla na každé nápravě jako funkce tlaku v okruhu brzd přední nápravy. |
|
f) |
Vypočítá se poměrné zpomalení vozidla jako funkce tlaku v okruhu přední nápravy s použitím následující rovnice:,
kde:
|

|
g) |
Vypočítá se využití adheze na každé nápravě jako funkce poměrného brzdného zpomalení s použitím následujících rovnic:
Symboly jsou definovány v bodě 2 této přílohy. |
|
h) |
Zakreslete f1 a f2 jako funkci z, pro naložené i nenaložené vozidlo. Jedná se o křivky využití adheze, které musí splňovat požadavky uvedené v bodě 5.2 písm. a) bodě ii) této přílohy (nebo v případě kontroly pro zajištění shodnosti výroby musí tyto křivky splňovat požadavky uvedené v bodě 6.2 této přílohy). |
PŘÍLOHA 6 (1)
Podmínky, kterými se řídí zkoušky vozidel s protiblokovacími systémy
1. OBECNĚ
|
1.1 |
Tato příloha definuje požadavky na brzdné účinky silničních vozidel s protiblokovacími systémy. |
|
1.2 |
Protiblokovací systémy známé v současné době obsahují jedno nebo více čidel, jedno nebo více řídicích zařízení a jeden nebo více modulátorů. Jakákoliv zařízení jiné koncepce, která mohou být zavedena v budoucnu, nebo zařízení, v nichž je protiblokovací funkce integrována do jiného systému, budou se pokládat za protiblokovací brzdový systém ve smyslu této přílohy a přílohy 5 tohoto předpisu, pokud jeho účinky budou ekvivalentní účinkům požadovaným touto přílohou. |
2. DEFINICE
|
2.1 |
„Protiblokovacím systémem“ se rozumí část systému provozního brzdění, která automaticky řídí míru skluzu kola ve směru jeho rotace, na jednom nebo více kolech vozidla při brzdění. |
|
2.2 |
„Čidlem“ se rozumí část určená k identifikaci stavu rotace kola/kol nebo dynamického stavu vozidla a k předání příslušných údajů do řídicího zařízení. |
|
2.3 |
„Řídicím zařízením“ se rozumí část určená k vyhodnocení údajů předaných čidlem/čidly a k předání signálu do modulátoru. |
|
2.4 |
„Modulátorem“ se rozumí část určená k změně brzdné síly / brzdných sil podle signálu, který byl předán ze řídicího zařízení. |
|
2.5 |
„Přímo regulovaným kolem“ se rozumí kolo, jehož brzdná síla se reguluje dle údajů vyslaných nejméně jeho vlastním čidlem (2). |
|
2.6 |
„Nepřímo regulovaným kolem“ se rozumí kolo, jehož brzdná síla se reguluje podle údajů vyslaných čidlem nebo čidly jiného kola nebo jiných kol (2). |
|
2.7 |
„Plným cyklováním“ se rozumí, že protiblokovací zařízení opakovaně řídí brzdnou sílu, aby zabránilo blokování přímo řízených kol. Brzdění, při němž k takovému řízení dojde jen jednou v průběhu zabrzdění do zastavení vozidla, se nepovažuje za brzdění splňující tuto definici. |
3. DRUHY PROTIBLOKOVACÍCH SYSTÉMŮ
3.1 Vozidlo se pokládá za vybavené protiblokovacím systémem ve smyslu bodu 1 přílohy 5 tohoto předpisu, je-li opatřeno některým z následujících systémů:
3.1.1 Protiblokovací systém kategorie 1
Vozidlo vybavené protiblokovacím systémem kategorie 1 musí splňovat všechna příslušná ustanovení této přílohy.
3.1.2 Protiblokovací systém kategorie 2
Vozidlo vybavené protiblokovacím systémem kategorie 2 musí splňovat všechna příslušná ustanovení této přílohy, s výjimkou bodu 5.3.5.
3.1.3 Protiblokovací systém kategorie 3
Vozidlo vybavené protiblokovacím systémem kategorie 3 musí splňovat všechna příslušná ustanovení této přílohy, s výjimkou bodů 5.3.4 a 5.3.5. Na takových vozidlech musí každá jednotlivá náprava, jež neobsahuje alespoň jedno přímo regulované kolo, splňovat místo požadavků na využití adheze stanovených v bodě 5.2 této přílohy požadavky na využití adheze a na pořadí blokování kol podle přílohy 5 tohoto předpisu. Pokud však vzájemná poloha křivek využití adheze nesplňuje požadavky bodu 3.1 přílohy 5 tohoto předpisu, ověří se zkouškou, zda se kola nejméně jedné ze zadních náprav neblokují před koly přední nápravy (nebo náprav) za podmínek stanovených v bodě 3.1 přílohy 5 tohoto předpisu pro tam uvedené brzdné účinky a zatížení vozidel. Plnění těchto ustanovení se může ověřit zkouškami na dráze s vysokým anebo s nízkým součinitelem adheze (přibližně 0,8 a nejvýše 0,3), přičemž se působí vhodnou silou na ovládací orgán provozního brzdění.
4. VŠEOBECNÉ POŽADAVKY
|
4.1 |
Každá elektrická porucha nebo chybná činnost čidla, která ovlivní systém z hlediska funkce a požadavků na účinky podle této přílohy, včetně poruch a chybné činnosti elektrického napájení, vnější kabeláže k řídicímu zařízení, řídicího (nebo řídicích) zařízení (3) a modulátoru/modulátorů, musí být signalizována řidiči zvláštním optickým výstražným zařízením. K tomuto účelu se použije výstražné zařízení se žlutým světlem, specifikované v bodě 5.2.21.1.2. |
|
4.1.1 |
Poruchy čidel, které nemohou být zjištěny ve statickém stavu, musí být zjištěny dříve, než rychlost vozidla překročí 10 km/h (4). Aby se však zabránilo chybné signalizaci, když čidlo nemůže udávat rychlost vozidla, protože se neotáčí určité kolo, může se ověření odložit, avšak porucha musí být zjištěna dříve, než rychlost vozidla překročí 15 km/h. |
|
4.1.2 |
Jakmile se protiblokovací systém uvede pod napětí u stojícího vozidla, musí elektricky ovládaný ventil/y pneumatického modulátoru vykonat nejméně jeden úplný cyklus. |
|
4.2 |
V případě jednotlivé funkční poruchy, která zasahuje jen protiblokovací funkci, jak ji indikuje výše uvedený výstražný signál se žlutým světlem, účinek provozního brzdění, které pak následuje, nesmí být nižší než 80 % předepsaného účinku při zkoušce typu 0 s odpojeným motorem. Tato hodnota odpovídá brzdné vzdálenosti 0,1 v + 0,0075 v2 (m) a střednímu plnému brzdnému zpomalení 5,15 m/s2. |
|
4.3 |
Činnost protiblokovacího systému nesmí být nepříznivě ovlivňována magnetickými nebo elektrickými poli (5) (to se musí prokázat splněním požadavků předpisu č. 10 ve znění série změn 02). |
|
4.4 |
Zakazuje se ruční zařízení k vyřazení protiblokovacího zařízení z činnosti nebo ke změně způsobu jeho řízení (6). |
5. ZVLÁŠTNÍ USTANOVENÍ
5.1 Spotřeba energie
Vozidla s protiblokovacími systémy musí zachovat svou schopnost řídit brzdný účinek při dlouhotrvajícím brzdění s plným zdvihem ovládacího orgánu pro provozní brzdění. Plnění tohoto požadavku se ověřuje následujícími zkouškami:
5.1.1 Zkušební postup
|
5.1.1.1 |
Počáteční energetická hladina v zásobníku/zásobnících musí mít hodnotu udanou výrobcem. Tato energetická hladina musí být nejméně taková, aby zajišťovala účinek předepsaný pro provozní brzdění při naloženém vozidle. Zásobník nebo zásobníky energie pro pneumatické vedlejší spotřebiče musí být izolovány. |
|
5.1.1.2 |
Brzdí se s plným zdvihem ovládacího orgánu, z počáteční rychlosti nejméně 50 km/h, na povrchu vozovky o součiniteli adheze rovném nebo menším než 0,3 (7), s naloženým vozidlem, po dobu t, přičemž se musí uvažovat energie spotřebovaná během této doby všemi nepřímo řízenými koly, přitom protiblokovací zařízení musí nadále řídit po tuto dobu všechna přímo regulovaná kola. |
|
5.1.1.3 |
Pak se zastaví motor vozidla nebo se přeruší doplňování zásobníku/zásobníků převodu energie. |
|
5.1.1.4 |
Provedou se čtyři za sebou následující plné zdvihy ovládacího orgánu pro provozní brzdění při stojícím vozidle. |
|
5.1.1.5 |
Při pátém zabrzdění musí být možné brzdit vozidlo s účinkem nejméně takovým, jaký je předepsán pro nouzové brzdění naloženého vozidla. |
5.1.2 Doplňkové požadavky
|
5.1.2.1 |
Součinitel adheze povrchu vozovky se určí s tímtéž vozidlem, se kterým se konají zkoušky, podle metody uvedené v bodě 1.1 dodatku 2 k této příloze. |
|
5.1.2.2 |
Zkouška brzdění se provede s odpojeným motorem, při volnoběhu a s naloženým vozidlem. |
|
5.1.2.3 |
Doba brzdění t se určí ze vzorce:
(avšak ne méně než 15 sekund), kde doba t je vyjádřena v sekundách a vmax znamená maximální konstrukční rychlost vozidla v km/h s horní hranicí 160 km/h. |

|
5.1.2.4 |
Pokud nelze dosáhnout doby t v jediné fázi brzdění, připouštějí se maximálně čtyři další fáze brzdění. |
|
5.1.2.5 |
Pokud se zkouší ve více fázích, nesmí se mezi jednotlivými fázemi zkoušky doplňovat žádná energie. Počínaje druhou fází se může vzít v úvahu energie spotřebovaná při prvním zabrzdění tím, že se odečte jedno zabrzdění s plným zdvihem od čtyř zabrzdění s plným zdvihem, předepsaných v bodech 5.1.1.4 (a 5.1.1.5 a 5.1.2.6) této přílohy, pro každou z druhé, třetí a čtvrté fáze, které se použily ve zkoušce stanovené bodem 5.1.1 této přílohy, podle případu. |
|
5.1.2.6 |
Účinek předepsaný v bodě 5.1.1.5 této přílohy se pokládá za splněný, pokud u stojícího vozidla na konci čtvrtého brzdění má hladina energie v zásobníku/zásobnících hodnotu rovnou nebo vyšší, než je hladina energie potřebná k dosažení účinku předepsaného pro nouzové brzdění s naloženým vozidlem. |
5.2 Využití adheze
|
5.2.1 |
Využití adheze protiblokovacím systémem odpovídá skutečnému přírůstku brzdné dráhy vzhledem k teoretické minimální hodnotě brzdné dráhy. Protiblokovací systém se pokládá za vyhovující, pokud je splněna podmínka ε ≥ 0,75, kde ε vyjadřuje využití adheze, jak je definováno v bodě 1.2 dodatku 2 k této příloze. |
|
5.2.2 |
Využití adheze ε se zjišťuje na drahách se součinitelem adheze nejvýše 0,3 (7) a pak o hodnotě okolo 0,8 (suchá vozovka), z počáteční rychlosti 50 km/h. Aby se vyloučily vlivy rozdílů teplot mezi brzdami, doporučuje se určit hodnotu zAL dříve než hodnotu k. |
|
5.2.3 |
Zkušební postup pro určení součinitele adheze (k) a způsob výpočtu využití adheze (ε) jsou uvedeny v dodatku 2 k této příloze. |
|
5.2.4 |
Využití adheze protiblokovacím systémem se ověřuje na úplných vozidlech vybavených protiblokovacími zařízeními kategorií 1 nebo 2. U vozidel vybavených protiblokovacími systémy kategorie 3 musí splnit tento požadavek pouze náprava/nápravy s nejméně jedním přímo regulovaným kolem. |
|
5.2.5 |
Požadavek ε ≥ 0,75 se ověří pro naložené i nenaložené vozidlo (8). Zkouška naloženého vozidla na povrchu s vysokým součinitelem adheze se může vypustit, pokud s předepsanou silou působící na ovládací orgán nelze dosáhnout plného cyklování protiblokovacího systému. Při zkoušce s nenaloženým vozidlem se může síla působící na ovládací orgán zvětšit až na 100 daN, pokud při působení plnou předepsanou silou (9) neproběhne úplný cyklus. Pokud síla 100 daN nepostačuje k tomu, aby systém začal cyklovat, pak se tato zkouška může vypustit. |
5.3 Doplňková ověření
Následující doplňková ověření se vykonají s odpojeným motorem a s vozidlem naloženým a nenaloženým:
|
5.3.1 |
kola přímo regulovaná protiblokovacím systémem se nesmějí blokovat, když se náhle zapůsobí na ovládací orgán plnou silou (9), a to na površích vozovky specifikovaných v bodě 5.2.2 této přílohy, při počáteční rychlosti 40 km/h a při vysoké počáteční rychlosti v = 0,8 vmax ≤ 120 km/h (10); |
|
5.3.2 |
když náprava přejíždí z povrchu o vysokém součiniteli adheze (kH) na povrch o nízkém součiniteli adheze (kL), přičemž kH ≥ 0,5 a kH/kL ≥ 2 (11), při působení plné síly (9) na ovládací orgán, nesmějí se přímo regulovaná kola blokovat. Rychlost vozidla a okamžik začátku brzdění se určí tak, aby při protiblokovacím zařízení v plné činnosti na povrchu s vysokým součinitelem adheze proběhl přejezd z jednoho povrchu na druhý jednak vysokou a jednak nízkou rychlostí, za podmínek stanovených v předchozím bodě 5.3.1 (10); |
|
5.3.3 |
když vozidlo přejíždí z povrchu o nízkém součiniteli adheze (kL) na povrch s vysokým součinitelem adheze (kH), přičemž kH ≥ 0.5 a kH/kL ≥ 2 (11) při působení plné síly (9) na ovládací orgán, musí zpomalení vozidla vzrůst na příslušně vysokou hodnotu za přiměřenou dobu a vozidlo se nesmí vychýlit ze svého počátečního směru. Rychlost vozidla a okamžik začátku brzdění se určí tak, aby při protiblokovacím systému v plné činnosti na povrchu s nízkým součinitelem adheze proběhl přejezd z jednoho povrchu na druhý rychlostí přibližně 50 km/h; |
|
5.3.4 |
ustanovení tohoto bodu platí jen pro vozidla s protiblokovacími systémy kategorie 1 nebo 2. Když jsou kola na pravé a levé straně vozidla na površích s rozdílnými součiniteli adheze (kH a kL), přičemž kH ≥ 0,5 a kH/kL ≥ 2 (11), nesmějí se přímo regulovaná kola zablokovat, když se náhle zapůsobí plnou silou (9) na ovládací orgán, při rychlosti vozidla 50 km/h; |
|
5.3.5 |
dále, naložená vozidla s protiblokovacím systémem kategorie 1 musí za podmínek stanovených v předchozím bodě 5.3.4 dosáhnout poměrné brzdné zpomalení předepsané v dodatku 3 této přílohy; |
|
5.3.6 |
při zkouškách stanovených v bodech 5.3.1, 5.3.2, 5.3.3, 5.3.4 a 5.3.5 této přílohy se však připouštějí krátkodobá blokování kol. Dále, blokování kol je přípustné při rychlosti vozidla nižší než 15 km/h a rovněž blokování nepřímo regulovaných kol je přípustné při jakékoli rychlosti vozidla, avšak směrová stabilita a řiditelnost vozidla nesmějí být přitom narušeny a vozidlo nesmí přesáhnout úhel stáčení 15° nebo vybočit z pruhu širokého 3,5 m; |
|
5.3.7 |
při zkouškách dle bodů 5.3.4 a 5.3.5 této přílohy je přípustná korekce směru řízením, pokud úhlové natočení volantu je menší než 120° v prvních dvou sekundách a celkem nepřesáhne 240°. Dále, na začátku těchto zkoušek musí podélná střední rovina vozidla procházet rozhraním mezi povrchy s vysokým a nízkým součinitelem adheze a během těchto zkoušek nesmí žádná část pneumatik překročit toto rozhraní (8). |
(1) Všechny poznámky pod čarou k příloze 6 naleznete na konci této přílohy.
(2) Za protiblokovací systémy s regulací horní selekcí se pokládají systémy obsahující jak přímo regulovaná, tak nepřímo regulovaná kola; v systémech s regulací dolní selekcí se pokládají za přímo regulovaná všechna kola, z nichž čidla snímají signály.
(3) Výrobce předá technickým zkušebnám dokumentaci týkající se řídícího/řídících zařízení ve formátu uvedeném v příloze 8.
(4) Pokud nedošlo k žádné poruše, může se výstražný signál znovu rozsvítit u stojícího vozidla za podmínky, že opět zhasne dříve, než vozidlo dosáhne rychlost 10 km/h nebo 15 km/h, v závislosti na případu.
(5) Do doby, než budou odsouhlaseny jednotné postupy zkoušek, budou výrobci předávat technickým zkušebnám své postupy a výsledky zkoušek.
(6) Rozumí se, že bod 4.4 se nevztahuje na zařízení měnící způsob regulace v protiblokovacím systému, pokud při změněném způsobu regulace jsou splněny všechny požadavky na protiblokovací systémy určité kategorie, kterými je vozidlo vybaveno.
(7) Do doby, než budou všeobecně dostupné zkušební dráhy s těmito povrchy, může technická zkušebna rozhodnout, že se použijí pneumatiky na hranici opotřebení a povrchy s vyššími součiniteli adheze až do hodnoty 0,4. Skutečně zjištěné hodnoty a typ pneumatik a typ povrchu dráhy se musí zaznamenat.
(8) Do doby, než bude vytvořen jednotný postup zkoušek, mohou být zkoušky požadované tímto bodem opakovány s vozidly s elektrickým rekuperačním brzdovým systémem, aby se určil vliv různých hodnot rozdělení brzdného účinku daných automatickými funkcemi na vozidle.
(9) „Plnou silou“ se rozumí největší síla stanovená v příloze 3 tohoto předpisu; větší sílu lze použít, pokud je potřebná k uvedení protiblokovacího systému do činnosti.
(10) Účelem těchto zkoušek je ověřit, že se kola neblokují a že vozidlo zůstává směrově stabilní; proto není potřebné brzdit až do zastavení vozidla na povrchu s nízkým součinitelem adheze.
(11) kH je součinitel adheze povrchu s vysokou adhezí.
kL je součinitel adheze povrchu s nízkou adhezí.
kH a kL se určí měřením uvedeným v dodatku 2 k této příloze.
DODATEK 1
SYMBOLY A DEFINICE
Tabulka
Symboly a definice
|
SYMBOL |
POZNÁMKY |
|
E |
rozvor |
|
ε |
využití adheze vozidlem: podíl největšího poměrného brzdného zpomalení s protiblokovacím zařízením zapnutým (zAL) a součinitelem adheze (k) |
|
εi |
hodnota ε změřená na nápravě „i“ (u motorového vozidla s protiblokovacím systémem kategorie 3) |
|
εH |
hodnota ε na povrchu s vysokým součinitelem adheze |
|
εL |
hodnota ε na povrchu s nízkým součinitelem adheze |
|
F |
síla (vyjádřená v N) |
|
Fdyn |
normálová reakce povrchu vozovky, v dynamickém stavu, s protiblokovacím systémem v činnosti |
|
Fidyn |
Fdyn na nápravě „i“, v případě motorových vozidel |
|
Fi |
normálová reakce povrchu vozovky působící na nápravu „i“ ve statickém stavu |
|
FM |
celková normálová statická reakce povrchu vozovky působící na všechna kola motorového vozidla |
|
FMnd (1) |
celková normálová statická reakce povrchu vozovky působící na nebrzděné a nepoháněné nápravy motorového vozidla |
|
FMd (1) |
celková normálová statická reakce povrchu vozovky působící na nebrzděné a poháněné nápravy motorového vozidla |
|
FWM (1) |
0,01 FMnd + 0,015 FMd |
|
g |
tíhové zrychlení (9,81 m/s2) |
|
h |
výška těžiště nad vozovkou, specifikovaná výrobcem a potvrzená technickou zkušebnou |
|
k |
součinitel adheze mezi pneumatikou a vozovkou |
|
kf |
hodnota součinitele k pro jednu přední nápravu |
|
kH |
hodnota součinitele k zjištěná na povrchu s vysokým součinitelem adheze |
|
ki |
hodnota k zjištěná pro nápravu „i“ na vozidle s protiblokovacím systémem kategorie 3 |
|
kL |
hodnota k zjištěná na povrchu s nízkým součinitelem adheze |
|
klock |
hodnota adheze pro 100% skluz |
|
kM |
hodnota součinitele k pro motorové vozidlo |
|
kpeak |
maximální hodnota křivky součinitele adheze v závislosti na skluzu |
|
kr |
hodnota součinitele k pro jednu zadní nápravu |
|
P |
hmotnost jednotlivého vozidla (kg) |
|
R |
poměr kpeak/klock |
|
t |
časový interval (s) |
|
tm |
střední hodnota t |
|
tmin |
minimální hodnota t |
|
z |
poměrné zpomalení |
|
zAL |
poměrné zpomalení z vozidla s protiblokovacím systémem v činnosti |
|
zm |
střední poměrné brzdné zpomalení |
|
zmax |
maximální hodnota z |
|
zMALS |
zAL motorového vozidla na površích s rozdílnou adhezí |
(1) V případě motorových vozidel s dvěma nápravami se symboly FMnd a FMd mohou zjednodušit odpovídajícími symboly Fi.
DODATEK 2
VYUŽITÍ ADHEZE
1. METODA MĚŘENÍ
1.1 Určení součinitele adheze (k)
|
1.1.1 |
Součinitel adheze (k) se určí jako podíl maximálních brzdných sil bez blokování kol a příslušného dynamického zatížení dané nápravy při brzdění. |
|
1.1.2 |
Zkoušené vozidlo se brzdí pouze jednou nápravou, z počáteční rychlosti 50 km/h. Brzdné síly musí být rozděleny mezi kola této nápravy tak, aby se dosáhlo maximálního brzdného účinku. Protiblokovací systém musí být vypnut nebo být mimo činnost při rychlosti mezi 40 km/h a 20 km/h. |
|
1.1.3 |
Ke stanovení největšího poměrného brzdného zpomalení vozidla zmax se vykoná větší počet zkoušek, přičemž pro každou z nich se vždy zvýší tlak v ovládacím potrubí. Při každé zkoušce se udržuje konstantní síla na pedálu a poměrné brzdné zpomalení se určí s odkazem na čas t potřebný ke snížení rychlosti ze 40 km/h na 20 km/h podle vzorce:
zmax je největší z hodnot z; čas t je vyjádřen v sekundách. |

|
1.1.3.1 |
Kola se smějí blokovat při rychlostech nižších než 20 km/h. |
|
1.1.3.2 |
Začne se s minimální měřenou hodnotou t, která se nazve tmin, pak se zvolí tři hodnoty t, které jsou mezi tmin a 1,05 tmin, a vypočte se jejich aritmetický průměr tm, pak se vypočte:
Pokud se prokáže, že z praktických důvodů nelze získat tři výše uvedené hodnoty, je možno užít hodnotu minimálního času tmin. Stále ovšem platí ustanovení bodu 1.3. |

|
1.1.4 |
Brzdné síly se vypočítají ze změřeného poměrného brzdného zpomalení s uvažováním valivého odporu nebrzděné nápravy, který činí 0,015 statického zatížení nápravy pro hnací nápravu a 0,010 statického zatížení pro nepoháněnou nápravu. |
|
1.1.5 |
Dynamické zatížení nápravy se určí podle vzorců uvedených v příloze 5 tohoto předpisu. |
|
1.1.6 |
Hodnota k se zaokrouhlí na tři desetinná místa. |
|
1.1.7 |
Zkouška se pak opakuje s další nápravou / dalšími nápravami, jak je uvedeno výše v bodech 1.1.1 až 1.1.6. |
|
1.1.8 |
Například pro dvounápravové vozidlo s pohonem zadní nápravy a s brzděnou přední nápravou (1) se součinitel adheze (k) určí podle vzorce:
Ostatní symboly (P, h, E) jsou definovány v příloze 5 tohoto předpisu. |
|
1.1.9 |
Jeden součinitel (kf) se zjistí pro přední nápravu a jeden (kr) pro zadní nápravu. |
1.2 Určení využití adheze (ε)
|
1.2.1 |
Využití adheze (ε) je definováno jako podíl největšího poměrného brzdného zpomalení s protiblokovacím systémem v činnosti (zAL) a součinitele adheze (kM), tj.
|

|
1.2.2 |
Největší poměrné brzdné zpomalení (zAL) se zjistí z počáteční rychlosti vozidla 55 km/h, s plně cyklujícím protiblokovacím systémem, jako průměrná hodnota ze tří zkoušek, jak je uvedeno v bodě 1.1.3 tohoto dodatku, přičemž se uvažuje čas potřebný ke snížení rychlosti vozidla ze 45 km/h na 15 km/h, podle následujícího vzorce:
|

|
1.2.3 |
Součinitel adheze kM se určí jako vážená hodnota s použitím dynamických zatížení náprav:
kde:
|
|
1.2.4 |
Hodnota ε se zaokrouhlí na dvě desetinná místa. |
|
1.2.5 |
U vozidla s protiblokovacím zařízením kategorie 1 nebo 2 se hodnota zAL týká celého vozidla, s protiblokovacím zařízením v činnosti, přičemž využití adheze (ε) je dáno týmž vzorcem, který je uveden v bodě 1.2.1 tohoto dodatku. |
|
1.2.6 |
Pro vozidla vybavená protiblokovacím systémem kategorie 3 se hodnota zAL zjistí pro každou nápravu, která má nejméně jedno přímo regulované kolo. Například, pro dvounápravové vozidlo s protiblokovacím zařízením působícím pouze na zadní nápravu (2), využití adheze (ε) je dáno vzorcem:
Tento výpočet se provede pro každou nápravu mající nejméně jedno přímo regulované kolo. |
1.3 Pokud ε > 1,00, změří se součinitel adheze znovu. Připouští se tolerance 10 %.
DODATEK 3
BRZDNÝ ÚČINEK NA POVRŠÍCH S ROZDÍLNOU ADHEZÍ
|
1. |
Předepsané poměrné brzdné zpomalení uvedené v bodě 5.3.5 této přílohy lze vypočítat jako funkci změřeného součinitele adheze obou povrchů, na nichž se koná zkouška. Tyto dva povrchy musí splňovat požadavky stanovené v bodě 5.3.4 této přílohy. |
|
2. |
Součinitelé adheze pro vysokou a jednak pro nízkou adhezi (kH, resp. kL) se určí podle ustanovení bodu 1.1 dodatku 2 k této příloze. |
|
3. |
Poměrné brzdné zpomalení (zMALS) pro naložená vozidla je dáno těmito vzorci:
|
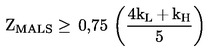 a Z
a ZDODATEK 4
METODA VOLBY POVRCHU S NÍZKÝM SOUČINITELEM ADHEZE
|
1. |
K výběru povrchu se součinitelem adheze definovaným v bodě 5.1.1.2 této přílohy musí mít pověřená technická zkušebna k dispozici určité údaje. |
|
1.1. |
Tyto údaje musí zahrnovat křivku součinitele adheze v závislosti na skluzu (od 0 do 100 % skluzu) pro rychlost přibližně 40 km/h. |
|
1.1.1. |
Maximální hodnota křivky se označí symbolem kpeak a hodnota při 100% skluzu klock. |
|
1.1.2. |
Poměr R se definuje jako podíl kpeak a klock.
|

|
1.1.3. |
Hodnota R se zaokrouhlí na jedno desetinné místo. |
|
1.1.4. |
Použitý povrch musí mít hodnotu poměru R mezi 1,0 a 2,0 (1). |
|
2. |
Před zkouškami se technická zkušebna musí ujistit, že zvolený povrch splňuje stanovené požadavky, a musí jí být známy následující údaje:
|
|
2.1. |
Hodnota R se uvede ve zkušebním protokolu. Povrch zkušební dráhy se musí přezkoušet nejméně jednou ročně, a to reprezentativním vozidlem, aby se ověřilo, zda hodnota R zůstává konstantní. |
(1) Do doby, než budou takové zkušební dráhy všeobecně dostupné, lze přijmout poměr R až do hodnoty 2,5, pokud s tím technická zkušebna souhlasí.
PŘÍLOHA 7
POSTUP ZKOUŠKY BRZDOVÝCH OBLOŽENÍ NA SETRVAČNÍKOVÉM DYNAMOMETRU
1. OBECNĚ
|
1.1 |
Postup popsaný v této příloze lze použít v případě změny typu vozidla, k níž došlo montáží nového typu brzdových obložení na vozidlo, které již bylo schváleno podle tohoto předpisu. |
|
1.2 |
Účinnost brzdových obložení nového typu se musí ověřit tím, že se jejich účinnost porovná s účinností dosaženou s obloženími, kterými bylo vozidlo vybaveno při schválení a odpovídajícími příslušným údajům v osvědčení o schválení, jehož vzor je v příloze 1 tohoto předpisu. |
|
1.3 |
Pověřená technická zkušebna může požadovat, pokud to pokládá za účelné, aby se účinky brzdových obložení porovnaly podle ustanovení obsažených v příloze 3 tohoto předpisu. |
|
1.4 |
Žádost o schválení, jejímž předmětem je porovnání účinků, předloží výrobce vozidla nebo jeho pověřený zástupce. |
|
1.5 |
Ve znění této přílohy se pojmem „vozidlo“ rozumí typ vozidla, který byl schválen podle tohoto předpisu a pro nějž se požaduje, aby porovnání účinků bylo považováno za vyhovující. |
2. ZKUŠEBNÍ VYBAVENÍ
|
2.1 |
Pro zkoušky se musí použít setrvačníkový dynamometr s těmito charakteristikami:
|
3. ZKUŠEBNÍ PODMÍNKY
|
3.1 |
Setrvačníkový dynamometr musí být nastaven tak, aby s tolerancí ±5 % reprodukoval co nejvěrněji rotační moment setrvačnosti odpovídající té části celkové setrvačné hmoty vozidla, jež je brzděna uvažovaným kolem nebo koly, a to podle tohoto vzorce: I = M R2, kde:
|
|
3.2 |
Počáteční otáčky setrvačníkového dynamometru musí odpovídat lineární rychlosti vozidla, která je předepsána v bodě 2.1.1.A přílohy 3 tohoto předpisu a musí se vypočítat jako funkce dynamického poloměru valení pneumatiky. |
|
3.3 |
Brzdová obložení musí být zaběhnuta na alespoň 80 % a během záběhu nesmí jejich teplota přesáhnout 180 °C, nebo alternativně, na žádost výrobce, zaběhnuta podle jeho doporučení. |
|
3.4 |
Lze užít ochlazování vzduchem; proud vzduchu musí směřovat na brzdu kolmo k ose rotace. Rychlost proudění vzduchu na brzdě nesmí být větší než 10 km/h. Teplota chladicího vzduchu se musí rovnat teplotě okolního prostředí. |
4. POSTUP PŘI ZKOUŠCE
4.1 Srovnávacím zkouškám se podrobí pět sad vzorků brzdového obložení; budou se srovnávat s pěti sadami obložení shodnými s původními obloženími, která jsou specifikována v osvědčení o prvním schválení příslušného typu vozidla.
4.2 Ekvivalentnost brzdových obložení se zjišťuje porovnáním výsledků dosažených zkušebními postupy předepsanými v této příloze a podle následujících ustanovení.
4.3 Zkouška brzdného účinku typu 0 se studenou brzdou
|
4.3.1 |
Zabrzdí se třikrát s počáteční teplotou nižší než 100 °C. Teplotu je nutno měřit tak, jak je uvedeno v bodě 2.1.4.4 této přílohy. |
|
4.3.2 |
Zabrzdí se z počátečních otáček odpovídajících počáteční rychlosti při zkoušce stanovené v bodě 2.1.1.A přílohy 3 tohoto předpisu, přičemž brzda se ovládá tak, aby dávala střední brzdný moment ekvivalentní zpomalení předepsanému v uvedeném bodě. Mimoto je třeba také zkoušet při různých počátečních otáčkách, přičemž nejnižší odpovídají 30 % nejvyšší rychlosti vozidla a nejvyšší 80 % této rychlosti. |
|
4.3.3 |
Střední brzdný moment zaznamenaný v průběhu výše uvedených zkoušek účinnosti brzdy za studena provedených na zkoušených obloženích pro účely porovnání, musí zůstat při zkoušce pro stejnou vstupní hodnotu v rozmezí ±15 % od středního brzdného momentu registrovaného pro brzdová obložení typu, který je specifikován v osvědčení o schválení uvažovaného typu vozidla. |
4.4 Zkouška typu I (slábnutí brzdného účinku):
4.4.1 Postup zahřívání
|
4.4.1.1 |
Brzdová obložení se zkoušejí podle postupu uvedeného v bodě 1.5.1 přílohy 3 tohoto předpisu. |
4.4.2 Brzdný účinek se zahřátou brzdou
|
4.4.2.1 |
Po zkoušce podle bodu 4.4.1 této přílohy se provede zkouška brzdného účinku se zahřátou brzdou podle bodu 1.5.2 přílohy 3 tohoto předpisu. |
|
4.4.2.2 |
Střední brzdný moment registrovaný v průběhu výše uvedených zkoušek účinnosti brzdy za tepla provedených na zkoušených obloženích pro účely porovnání, musí zůstat při zkoušce pro stejnou vstupní hodnotu v rozmezí ±15 % od středního brzdného momentu registrovaného pro brzdová obložení typu, který je specifikován v osvědčení o schválení uvažovaného typu vozidla. |
5. PROHLÍDKA BRZDOVÝCH OBLOŽENÍ
|
5.1 |
Po všech výše uvedených zkouškách se musí brzdová obložení vizuálně vyšetřit, aby se ověřilo, že jsou ještě v dostatečně dobrém stavu, aby se mohla nadále na vozidle v normálním provozu používat. |
PŘÍLOHA 8
Zvláštní požadavky týkající se bezpečnostních hledisek komplexních elektronických řídicích systémů vozidel
1. OBECNĚ
V této příloze jsou definovány zvláštní požadavky na dokumentaci, strategii týkající se poruch a na ověřování s ohledem na bezpečnostní hlediska komplexních elektronických řídicích systémů vozidel (definice viz bod 2.3 níže), pokud jde o tento předpis.
Na tuto přílohu může být zvláštními body v tomto předpise odkázáno také v souvislosti s funkcemi týkajícími se bezpečnosti, jež jsou ovládány elektronickým systémem / elektronickými systémy.
V této příloze nejsou specifikována kritéria účinnosti „daného systému“, ale je zde uvedena metodika uplatněná při konstrukčním procesu a informace, jež musí být pro účely schválení typu sděleny technické zkušebně.
Tyto informace musí prokázat, že „daný systém“ za standardních podmínek a v poruchovém stavu splňuje všechny příslušné požadavky na účinnost uvedené jinde v tomto předpise.
2. DEFINICE
Pro účely této přílohy se:
|
2.1 |
„Koncepcí bezpečnosti“ rozumí popis opatření začleněných do systému, např. v rámci elektronických jednotek, aby zajistily integritu systému a tím bezpečný provoz i v případě elektrické poruchy. Částí bezpečnostní koncepce může být možnost přechodu k částečnému fungování nebo dokonce k nouzovému systému pro zásadně důležité funkce vozidla. |
|
2.2 |
„Elektronickým řídicím systémem“ rozumí kombinace jednotek konstruovaná k tomu, aby podporovala zajištění stanovené funkce ovládání vozidla pomocí zpracování elektronických dat. Takové systémy, často softwarově ovládané, se skládají z jednotlivých funkčních součástek, jako jsou čidla, elektronické řídicí jednotky a akční členy, a jsou propojeny přenosovými spoji. Mohou zahrnovat mechanické, elektropneumatické či elektrohydraulické prvky. „Daným systémem“ uvedeným v této souvislosti se rozumí systém, pro který se požaduje schválení typu. |
|
2.3 |
„Komplexními elektronickými řídicími systémy vozidel“ rozumí elektronické řídicí systémy, na které se vztahuje hierarchie ovládání, ve které může být ovládaná funkce potlačena systémem/funkcí elektronického ovládání vyšší úrovně. Potlačená funkce se stává součástí komplexního systému. |
|
2.4 |
„Řídicími systémy nebo funkcemi vyšší úrovně“ rozumí systémy nebo funkce, které používají doplňkové procesy ke snímání a/nebo zpracování za účelem změnit chování vozidla vyvoláním změn normální funkce/funkcí řídicího systému vozidla. To komplexním systémům umožňuje automaticky měnit své požadované účinky s prioritou, jež závisí na zjištěných okolnostech. |
|
2.5 |
„Jednotkami“ rozumí nejmenší části jednotlivých součástí systému, jimiž se tato příloha zabývá, protože tyto kombinace součástí budou pro účely identifikace, analýzy či výměny považovány za samostatné objekty. |
|
2.6 |
„Přenosovými spoji“ rozumí prostředky využívané k propojení různě rozmístěných jednotek za účelem přenosu signálů, provozních dat či přívodu energie. Z celkového pohledu se jedná o elektrická zařízení, avšak některé jejich části mohou být mechanické, pneumatické, hydraulické nebo optické. |
|
2.7 |
„Rozsahem ovládání“ odkazuje na výstupní veličinu a definuje rozsah, v rámci něhož systém pravděpodobně uplatní funkce ovládání. |
|
2.8 |
„Hranicí funkčního provozu“ definují hranice vnějších fyzických možností, v rámci nichž je systém schopen udržet kontrolu. |
3. DOKUMENTACE
3.1 Požadavky
Výrobce musí předložit soubor dokumentace, která dává přehled o základní koncepci „daného systému“ a o prostředcích, pomocí kterých je tento systém propojen s ostatními systémy vozidla a kterými přímo ovládá výstupní veličiny.
Musí být vysvětlena/vysvětleny funkce „daného systému“ a koncepce bezpečnosti, jak jsou stanoveny výrobcem.
Dokumentace musí být stručná, avšak musí dokládat, že v rámci konstrukce a vývoje bylo využito odborných znalostí ze všech oblastí systému, jež jsou zahrnuty.
Pro účely pravidelných technických kontrol musí dokumentace obsahovat popis, jakým způsobem lze zkontrolovat aktuální provozní stav „daného systému“.
|
3.1.1 |
Dokumentace se musí skládat ze dvou částí:
|
3.2 Popis funkcí „daného systému“.
Musí být předložen popis, který poskytne jednoduché objasnění všech ovládacích funkcí „daného systému“ a využívaných metod dosahování požadovaných účinků, včetně uvedení mechanismu/mechanismů, pomocí kterých jsou funkce ovládání prováděny.
|
3.2.1 |
Musí být předložen seznam všech vstupních a zjištěných veličin, jakož i jejich vymezený pracovní rozsah. |
|
3.2.2 |
Musí být předložen seznam všech výstupních veličin, jež jsou ovládány „daným systémem“, a musí být v jednotlivých případech uvedeno, zda ovládání probíhá přímým způsobem nebo prostřednictvím jiného systému vozidla. Musí být vymezen rozsah ovládání (bod 2.7) uplatněný u každé této veličiny. |
|
3.2.3 |
U účinnosti systému musí být případně uvedeny meze vymezující hranice funkčního provozu (bod 2.8). |
3.3 Uspořádání a schéma „systému“
3.3.1 Seznam součástí
Musí být předložen seznam zahrnující všechny jednotky „daného systému“, kde budou uvedeny i ostatní systémy vozidla, jichž je zapotřebí pro zajištění příslušné funkce ovládání.
Musí být předložen základní přehled, jenž tyto jednotky schematicky znázorní v jejich vzájemném spojení, přičemž z něj musí jasně vyplývat rozmístění jednotlivých zařízení i jejich vzájemná propojení.
3.3.2 Funkce jednotek
Funkce každé jednotky „daného systému“ musí být v základních rysech popsány a musí být uvedeny signály, jež ji propojují s ostatními jednotkami nebo s ostatními systémy vozidla. Tento přehled lze předložit v podobě označeného blokového nebo jiného schématu či formou popisu doplněného takovým schématem.
3.3.3 Propojení
Propojení uvnitř „daného systému“ se znázorní schématem zapojení elektrických převodových spojení, schématem optických vláken pro optická spojení, schématem potrubí u pneumatických nebo hydraulických převodů a zjednodušeným schématem sestavy u mechanických spojení.
3.3.4 Tok signálu a priority
Mezi uvedenými přenosovými spoji a signály přenášenými mezi jednotlivými jednotkami musí existovat jasný soulad.
Priority signálů na multiplexovaných datových cestách musí být uvedeny všude, kde může priorita představovat problém ovlivňující účinnost či bezpečnost, pokud jde o tento předpis.
3.3.5 Identifikace jednotek
Každá jednotka musí být jasně a jednoznačně identifikovatelná (např. pomocí označení pro hardware a pomocí označení nebo softwarového výstupu pro softwarový obsah), aby jí bylo možné přiřadit odpovídající hardware a dokumentaci.
V případech, kdy jsou funkce kombinovány v rámci jediné jednotky nebo ve skutečnosti v rámci jediného počítače, avšak z důvodu srozumitelnosti a názornosti znázorněny ve více blocích v blokovém schématu, použije se pouze jediné identifikační označení hardwaru.
Výrobce použitím tohoto označení potvrzuje, že dodané zařízení je v souladu s odpovídajícím dokumentem.
|
3.3.5.1 |
Označení vymezuje hardware a verzi softwaru, přičemž v případě změny verze softwaru jako např. za účelem změny funkce jednotky, pokud jde o tento předpis, se změní i toto označení. |
3.4 Bezpečnostní koncepce výrobce
|
3.4.1 |
Výrobce předloží prohlášení, kterým se potvrzuje, že strategie zvolená k dosahování požadovaných účinků „daného systému“ za podmínek bezporuchového stavu nesníží bezpečnost provozu systémů, na něž se vztahují ustanovení tohoto předpisu. |
|
3.4.2 |
Pokud jde o software použitý v rámci „daného systému“, musí být vysvětlena jeho základní architektura a musí být uvedeny metody a nástroje použité při jeho návrhu. Výrobce musí být připraven na vyžádání předložit doklady o prostředcích, jejichž pomocí v průběhu procesu návrhu a vývoje stanovil provedení logiky systému. |
|
3.4.3 |
Výrobce předloží technickým zkušebnám podklady k objasnění konstrukčních opatření, jež jsou do „daného systému“ zabudovány za účelem zajištění bezpečnosti provozu v poruchovém stavu. Jako příklady případných konstrukčních opatření pro případ poruchy v „daném systému“ lze uvést:
V případě poruchy musí být řidič upozorněn např. pomocí výstražného signálu nebo zobrazeného hlášení. Není-li systém deaktivován řidičem, např. otočením spínače zapalování do pozice „vypnuto“ nebo vypnutím příslušné funkce, je-li za tímto účelem k dispozici zvláštní vypínač, musí být výstraha patrná po celou dobu trvání poruchového stavu. |
|
3.4.3.1 |
V případě, že vybrané opatření zvolí provozní režim částečné účinnosti za určitých podmínek poruchového stavu, musí být tyto podmínky uvedeny a musí být vymezena výsledná omezení účinnosti. |
|
3.4.3.2 |
V případě, že vybrané opatření zvolí pro dosažení požadovaného účinku řídicího systému vozidla druhotné (záložní) prostředky, musí být vysvětleny zásady mechanismu přepínání, logika a úroveň rezervy a veškeré prvky kontroly zálohy a musí být vymezena výsledná omezení účinnosti zálohy. |
|
3.4.3.3 |
V případě, že vybrané opatření zvolí vyřazení funkce vyšší úrovně, musí být potlačeny veškeré odpovídající výstupní ovládací signály s touto funkcí spojené, a sice takovým způsobem, aby bylo omezeno narušení přechodové fáze. |
|
3.4.4 |
K dokumentaci musí být přiložena analýza, která celkově znázorní, jak se systém bude chovat v případě výskytu jakékoli z uvedených poruch souvisejících s účinností ovládání vozidla či bezpečností. Tato analýza může být založena na analýze způsobů selhání a jejich následků (FMEA), analýze pomocí stromové struktury příčin (FTA) nebo na jakémkoli jiném podobném postupu vhodném z hlediska aspektů bezpečnosti systému. Zvolený analytický přístup/y musí být definován/y a aktualizován/y výrobcem a musí být dostupný ke kontrole technickou zkušebnou při schválení typu. |
|
3.4.4.1 |
V této dokumentaci musí být uvedeny parametry, které se monitorují a musí být uveden pro každý druh poruchy, definované výše v bodě 3.4.4, výstražný signál pro řidiče a/nebo pro pracovníky servisu nebo pracovníky provádějící technické prohlídky. |
4. OVĚŘENÍ A ZKOUŠKA
4.1 Funkční provoz „daného systému“, jak je stanoven v dokumentech požadovaných v bodě 3, se zkouší takto:
4.1.1 Ověření funkčnosti „daného systému“
Ověření účinnosti systému vozidla za podmínek bezporuchového stavu jako prostředek pro vytvoření normálních provozních úrovní se provede podle základních specifikací výrobce pro zkušební test, není-li toto ověření předmětem stanovené zkoušky účinnosti jako součásti postupu schvalování podle tohoto nebo jiného předpisu.
4.1.2 Ověření koncepce bezpečnosti podle bodu 3.4
Reakce „daného systému“ pod vlivem poruchy v jakékoli samostatné jednotce se podle uvážení schvalovacího orgánu zkontroluje pomocí vyslání odpovídajících výstupních signálů do elektrických jednotek nebo mechanických prvků za účelem simulace účinků vnitřních poruch v rámci dané jednotky.
|
4.1.2.1 |
Výsledky ověření se musí shodovat s doloženým shrnutím analýzy poruchy na úrovni celkového účinku tak, aby byly koncepce bezpečnosti a její realizace potvrzeny jako přiměřené. |
PŘÍLOHA 9
SYSTÉMY ELEKTRONICKÉHO ŘÍZENÍ STABILITY A BRZDOVÉ ASISTENČNÍ SYSTÉMY
A. POŽADAVKY NA SYSTÉMY ELEKTRONICKÉHO ŘÍZENÍ STABILITY, JESTLIŽE JSOU NA VOZIDLE
1. VŠEOBECNÉ POŽADAVKY
Vozidla vybavená systémem ESC musí splňovat funkční požadavky specifikované v kapitole 2 a požadavky na vlastnosti podle kapitoly 3, postupy zkoušek specifikované v kapitole 4 a podmínky zkoušek uvedené v kapitole 5 této části.
2. FUNKČNÍ POŽADAVKY
Každé vozidlo, pro které platí tato příloha, musí být vybaveno systémem elektronického řízení stability, který:
|
2.1 |
je schopný používat brzdné momenty individuálně na každém ze čtyř kol (1) a má řídicí algoritmus, který umožňuje tuto funkci vykonávat; |
|
2.2 |
je schopný pracovat v celém rozsahu rychlostí vozidla, v průběhu všech fází jízdy, včetně zrychlení, volného dojezdu a zpomalení (včetně brzdění), s výjimkou těchto případů:
|
|
2.3 |
zůstává schopný činnosti, i když jsou v činnosti protiblokovací systém brzd nebo systém regulace trakce. |
3. POŽADAVKY NA ÚČINNOST
V průběhu každé zkoušky provedené za zkušebních podmínek podle bodu 4 a postupem zkoušky podle bodu 5.9 musí vozidlo se systémem ESC v činnosti splňovat kritéria směrové stability podle bodů 3.1 a 3.2 a musí splňovat kritérium odezvy podle bodu 3.3 v průběhu každé z těchto zkoušek vykonávaných s naprogramovaným úhlem natočení volantu o hodnotě 5 A nebo větším, avšak s omezením podle ustanovení bodu 5.9.4, přičemž A je úhel natočení volantu (2) vypočtený podle bodu 5.6.1.
Když bylo vozidlo fyzicky zkoušeno podle bodu 4, lze prokázat vyhovění verzí nebo variant téhož typu vozidla počítačovou simulací, která zahrnuje podmínky zkoušky podle bodu 4 a postup zkoušky podle bodu 5.9. Použití simulátoru je definováno v dodatku 1 k této příloze.
3.1 Rychlost stáčení měřená po jedné sekundě po vykonání sinusového natáčení volantu s následující prodlevou (čas T0 + 1 na obrázku 1) nesmí přesáhnout 35 % první špičkové hodnoty rychlosti stáčení zaznamenané po tom, co úhel natočení volantu změní znaménko (mezi první a druhou špičkovou hodnotou) (ψ peak na obrázku 1) v průběhu téže části zkoušky.
Obrázek 1
Poloha volantu a údaje o rychlosti stáčení k hodnocení boční stability
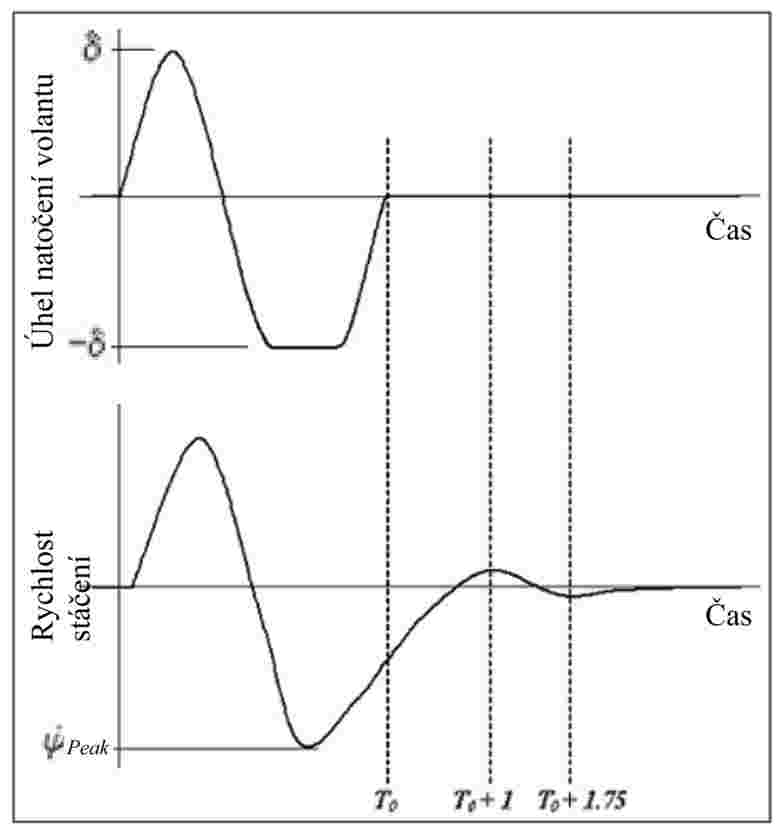
3.2 Rychlost stáčení měřená 1,75 sekundy po vykonání sinusového natáčení volantem s následující prodlevou nesmí překročit 20 % první špičkové hodnoty rychlosti stáčení zaznamenané po tom, co úhel natočení volantu změní znaménko (mezi první a druhou špičkovou hodnotou) v průběhu téže části zkoušky.
3.3 Boční posuv těžiště vozidla vzhledem k jeho počátečnímu přímému směru musí být nejméně 1,83 m u vozidel, která mají maximální hmotnost nejvýše 3 500 kg, a 1,52 m u vozidel, která mají maximální hmotnost vetší než 3 500 kg, když je vypočten za 1,07 sekundy po počátku manévru natáčení volantu. Počátek manévru natáčení volantu je definován v bodě 5.11.6.
|
3.3.1 |
Boční posuv se vypočte jako dvojitý integrál vzhledem k času měření bočního zrychlení v těžišti vozidla podle vzorce: Boční posuv = U zkoušky pro schválení typu je možné povolit alternativní metodu měření, za předpokladu, že tato metoda představuje alespoň stejný stupeň přesnosti, jako metoda dvojitého integrálu. |
|
3.3.2 |
Čas t = 0 pro provedení integrace je okamžik počátku zásahu na volantu, který je nazýván počátkem manévru natáčení volantem. Počátek manévru natáčení volantem je definován v bodě 5.11.6. |
3.4 Zjištění chybné funkce ESC
Vozidlo musí být vybaveno sdělovačem, který signalizuje řidiči výskyt každé chybné funkce, která ovlivňuje generování nebo předávání signálu řízení nebo odezvy v systému elektronického řízení stability.
|
3.4.1 |
Sdělovač chybné funkce ESC:
|
|
3.4.2 |
Sdělovač chybné funkce ESC nemusí být uveden do činnosti, pokud je zablokována činnost startéru. |
|
3.4.3 |
Požadavek bodu 3.4.1.7 neplatí pro sdělovače zobrazující se na společné zobrazovací ploše. |
|
3.4.4 |
Výrobce může použít sdělovač chybné funkce ESC s blikajícím světlem k indikaci činnosti ESC. |
3.5 Ovladače k vypnutí ESC a ovladače jiných systémů
Výrobce muže nainstalovat ovladač „vypnutí ESC“, který musí být osvětlen, když jsou v činnosti světlomety vozidla, a jehož účelem je uvést systém ESC do režimu, ve kterém už nemusí splňovat vlastnosti požadované v bodech 3, 3.1, 3.2 a 3.3. Výrobci mohou také nainstalovat ovladače pro jiné systémy, které mají pomocné funkce k činnosti ESC. Ovladače jednoho i druhého druhu, které uvedou systém ESC do režimu, v němž už nemusí splňovat vlastnosti požadované v bodech 3, 3.1, 3.2 a 3.3, jsou přípustné za podmínky, že systém také splňuje požadavky bodů 3.5.1, 3.5.2 a 3.5.3.
|
3.5.1. |
Systém ESC vozidla se musí vždy vrátit do režimu původního seřízení výrobcem, který splňuje požadavky kapitol 2 a 3, na počátku každého nového cyklu uvedení do činnosti zapalování, bez ohledu na to, jaký režim předtím zvolil řidič. Avšak systém ESC vozidla se nemusí na počátku každého nového cyklu zapalování vždy vrátit do režimu, ve kterém splňuje požadavky bodů 3 až 3.3, jestliže:
|
|
3.5.2 |
Ovladač, jehož jediným účelem je uvést systém ESC do režimu, v kterém už dále nebude splňovat požadavky na vlastnosti podle bodů 3, 3.1, 3.2 a 3.3, musí být označen dále znázorněným symbolem pro „ESC vypnut“ nebo nápisem „ESC OFF“:
|

|
3.5.3. |
Ovladač pro systém ESC, jehož účelem je uvést systém ESC do různých režimů, z nichž nejméně jeden už dále nebude splňovat požadavky na vlastnosti podle bodů 3, 3.1, 3.2 a 3.3, musí být označen níže znázorněným symbolem, který je doprovázen nápisem „OFF“ v blízkosti polohy ovladače pro tento režim.
Alternativně, pokud je režim systému ESC řízen multifunkčním ovladačem, musí displej zřetelně identifikovat řidiči polohu ovladače pro tento režim s použitím buď symbolu podle bodu 3.5.2, nebo nápisu „ESC OFF“. |

|
3.5.4 |
Ovladač pro jiný systém, který má jako vedlejší účinek uvedení systému ESC do režimu, v kterém systém ESC už dále nebude splňovat požadavky na vlastnosti podle bodů 3, 3.1, 3.2 a 3.3, nemusí být označen identifikátory „ESC OFF“ podle bodu 3.5.2. |
3.6 Sdělovač vypnutí systému ESC
Jestliže výrobce zvolí namontování ovladače k vypnutí systému ESC nebo k omezení jeho vlastností, jak je uvedeno v bodě 3.5, musí být splněny požadavky bodů 3.6.1 až 3.6.4 za účelem výstrahy řidiči o omezení funkčnosti systému ESC. Tento požadavek neplatí pro režim zvolený řidičem uvedený v bodě 3.5.1.2.
|
3.6.1 |
Výrobce vozidla musí instalovat sdělovač signalizující, že vozidlo bylo uvedeno do režimu, ve kterém už není možno splňovat požadavky na vlastnosti podle bodů 3, 3.1, 3.2 a 3.3, jestliže systém takový režim obsahuje. |
|
3.6.2 |
Sdělovač vypnutí systému ESC:
|

|
3.6.3 |
Sdělovač vypnutí systému ESC nemusí být uveden do činnosti, když je zablokována činnost startéru. |
|
3.6.4 |
Požadavek bodu 3.6.2.7 neplatí pro sdělovače zobrazující se na společné zobrazovací ploše. |
|
3.6.5 |
Výrobce vozidla muže použít sdělovač vypnutí ESC k indikování úrovně funkce ESC jiné než původního standardního nastavení výrobce, i když vozidlo splňuje požadavky na vlastnosti podle bodů 3, 3.1, 3.2 a 3.3 při uvedené úrovni funkce ESC. |
3.7 Technická dokumentace systému ESC
Kromě požadavku stanovených v příloze 8 tohoto předpisu musí dokumentace o schválení obsahovat dokumentaci výrobce uvedenou dále v bodech 3.7.1 až 3.7.4, aby se potvrdilo, že vozidlo je vybaveno systémem ESC, který splňuje definici systému ESC stanovenou v bodě 2.25 tohoto předpisu.
|
3.7.1 |
Schéma systému identifikující celý hardware systému ESC. Schéma musí identifikovat, které komponenty jsou použity ke generování brzdných momentů na každém kole, k určování rychlosti stáčení vozidla, k vyhodnocení bočního skluzu nebo změny bočního skluzu a k určení vstupních hodnot volantu od řidiče. |
|
3.7.2 |
Stručný písemný výklad postačující k popisu základních provozních charakteristik systému ESC. Tento výklad musí zahrnovat celkový popis schopností systému vytvářet brzdné momenty na každém kole a způsoby, jimiž systém upravuje hnací moment v průběhu činnosti systému ESC a vysvětlit, jak se přímo určuje rychlost stáčení vozidla. Výklad musí také identifikovat rozsah rychlostí vozidla a jednotlivé fáze jízdy (zrychlení, zpomalení, volný dojezd, průběh činnosti ABS nebo regulace trakce), za nichž může být systém ESC v činnosti. |
|
3.7.3 |
Logický diagram. Diagram ilustruje výklad podle bodu 3.7.2. |
|
3.7.4 |
Informace o nedotáčivosti. Celkový popis příslušných vstupů do počítače, které ovládají hardware systému ESC a popis, jak jsou tyto vstupy použity k omezení nedotáčivosti vozidla. |
4. ZKUŠEBNÍ PODMÍNKY
4.1 Podmínky okolí
|
4.1.1 |
Okolní teplota je mezi 0 °C a 45 °C. |
|
4.1.2 |
Maximální rychlost větru nesmí být větší než 10 m/s u vozidel s faktorem statické stability SSF > 1,25 a 5 m/s u vozidel s SSF ≤ 1,25. |
4.2 Povrch zkušební dráhy
|
4.2.1 |
Zkoušky se provedou na suchém, stejnorodém a tvrdém povrchu. Nevhodné jsou povrchy s nepravidelnostmi a zvlněními, jako jsou prolákliny a široké trhliny. |
|
4.2.2 |
Povrch zkušební dráhy musí mít jmenovitý (3) maximální brzdný koeficient 0,9, pokud není stanoveno jinak, který se měří:
|
|
4.2.3 |
Zkušební povrch má pravidelný sklon nejvýše 1 %. |
4.3 Podmínky týkající se vozidla
|
4.3.1 |
Systém ESC je při všech zkouškách v činnosti. |
|
4.3.2 |
Hmotnost vozidla. Vozidlo je naložené, s palivovou nádrží naplněnou na nejméně 90 % objemu, a uvnitř vozidla je celkové zatížení 168 kg, které se skládá ze zkušebního řidiče, přibližně 59 kg zkušebního zařízení (automatizovaný přístroj k řízení, systém sběru dat a zdroj pro pohon přístroje k řízení) a ze zátěže potřebné k vyrovnání rozdílů v hmotnosti zkušebního řidiče a zkušebního zařízení. Tam, kde je to potřebné, se zátěž umístí na podlahu za předním sedadlem spolujezdce nebo, je-li to nutné, v prostoru pro nohy spolujezdce na předním sedadle. Všechna zátěž musí být zajištěna tak, aby se v průběhu zkoušek nemohla posouvat. |
|
4.3.3 |
Pneumatiky. Pneumatiky jsou nahuštěny na tlak/y doporučený/é výrobcem vozidla pro studené pneumatiky, např. jak jsou specifikovány na nálepce ve vozidle nebo na štítku s údaji o huštění pneumatik. Pneumatiky mohou být opatřeny dušemi, aby se zabránilo vyvlečení patek pláště. |
|
4.3.4 |
Opěry proti převrácení. Při zkouškách se mohou použít opěry proti převrácení, jestliže se to pokládá za potřebné pro bezpečnost zkušebního řidiče. V takovém případě u vozidel s faktorem statické stability SSF ≤ 1,25 platí následující ustanovení:
|
|
4.3.5 |
Automatizovaný přístroj k řízení. Přístroj k řízení naprogramovaný k vykonávání požadovaných manévrů řízení se použije podle bodů 5.5.2, 5.5.3, 5.6 a 5.9. Přístroj k řízení musí být schopný vytvořit momenty na hřídeli volantu mezi 40 Nm až 60 Nm. Přístroj k řízení musí být schopný vytvořit tyto momenty při rychlostech natáčení volantu až do 1 200 stupňů za sekundu. |
5. POSTUP ZKOUŠKY
5.1 Pneumatiky se nahustí na tlak/y doporučený/é výrobcem vozidla pro studené pneumatiky, např. jak jsou specifikovány na nálepce ve vozidle nebo na štítku s údaji o huštění pneumatik.
5.2 Kontrola žárovky sdělovače na stojícím vozidle a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ se uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“), nebo, podle případu, do polohy určené ke kontrole žárovky. Sdělovač chybné funkce ESC se musí uvést do činnosti, jako kontrola funkce žárovky, jak je specifikováno v bodě 3.4.1.7, a pokud je na vozidle, musí se také uvést do činnosti sdělovač vypnutí ESC, jako kontrola žárovky, jak je specifikováno v bodě 3.6.2.7. Kontrola žárovky sdělovače se nepožaduje u sdělovače, který se zobrazí na společné zobrazovací ploše, jak je specifikováno v bodech 3.4.3 a 3.6.4.
5.3 Kontrola ovladače vypnutí ESC. U vozidel vybavených ovladačem „ESC OFF“ se u stojícího vozidla a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“). Ovladač „ESC OFF“ se uvede do činnosti a ověří se, že se rozsvítí sdělovač „ESC OFF“, jak je uvedeno v bodě 3.6.4. Systém zámku zapalování se uvede opět do polohy „uzamknuto“ nebo „vypnuto“. Znovu se uvede systém zámku zapalování do polohy „zapnuto“ („běh motoru“) a ověří se, že sdělovač „ESC OFF“ zhasnul, čímž se udává, že systém ESC byl znovu zapnut, jak je uvedeno v bodě 3.5.1.
5.4 Příprava brzd
Brzdy vozidla se připraví, jak je popsáno v bodech 5.4.1 až 5.4.4.
|
5.4.1 |
Vykoná se deset zabrzdění z rychlosti 56 km/h s průměrným zpomalením přibližně 0,5 g. |
|
5.4.2 |
Bezprostředně po sérii zabrzdění z 56 km/h se vykonají tři doplňková zabrzdění z rychlosti 72 km/h s větším zpomalením. |
|
5.4.3 |
Při brzděních podle bodu 5.4.2 se působí na brzdový podál silou, která postačí k uvedení protiblokovacího systému vozidla (ABS) do činnosti po větší část každého brzdění. |
|
5.4.4 |
Po závěrečném zabrzdění podle bodu 5.4.2 jede vozidlo rychlostí 72 km/h po dobu pěti minut, aby se brzdy ochladily. |
5.5 Příprava pneumatik
Pneumatiky se připraví následujícím postupem podle bodů 5.5.1 až 5.5.3, aby se odstranil lesklý povrch z výrobní formy a aby se dosáhlo provozní teploty bezprostředně před začátkem zkoušek podle bodů 5.6 a 5.9.
|
5.5.1 |
Se zkoušeným vozidlem se jede po kružnici o průměru 30 m rychlostí, při které dojde k bočnímu zrychlení přibližně 0,5 g až 0,6 g, a projedou se tři kružnice ve směru pohybu hodinových ručiček a tři kružnice ve směru proti pohybu hodinových ručiček. |
|
5.5.2 |
Použije se sinusové natáčení volantu s frekvencí 1 Hz, s vrcholem amplitudy úhlu natočení volantu odpovídajícím maximu bočního zrychlení 0,5 g až 0,6 g, a při rychlosti 56 km/h se s vozidlem projedou čtyři úseky, během každého z nichž se vykoná 10 cyklů sinusového natáčení volantu. |
|
5.5.3 |
Amplituda úhlu natočení volantu v posledním cyklu posledního úseku je dvojnásobná v porovnání s ostatními cykly. Maximální doba, která je přípustná mezi dvěma kružnicovými průjezdy nebo mezi dvěma průjezdy úseku, je pět minut. |
5.6 Manévr s pomalu se zvětšujícím úhlem natočení volantu
S vozidlem se provedou dvě série jízd zkoušky s pomalu se zvětšujícím úhlem natočení volantu při konstantní rychlosti vozidla 80 km/h ± 2 km/h a s úhlem natočení volantu, který roste o 13,5 °/s, do dosažení bočního zrychlení přibližně 0,5 g. Každá série zkoušek zahrnuje tři opakované zkoušky. V jedné sérii zkoušek se volant natáčí proti směru pohybu hodinových ručiček, v druhé sérii zkoušek ve směru pohybu hodinových ručiček. Maximální doba přípustná mezi každou z jednotlivých zkoušek je pět minut.
|
5.6.1 |
Ze zkoušek s pomalu se zvětšujícím úhlem natočení volantu se určí veličina „A“. Veličina „A“ je úhel natočení volantu vyjádřený ve stupních, při kterém se dosáhne ustálené boční zrychlení (korigované metodou podle bodu 5.11.3) zkoušeného vozidla o hodnotě 0,3 g. Lineární regresí se vypočte z každé ze šesti zkoušek s pomalu se zvětšujícím úhlem natočení volantu hodnota „A“ na nejbližší desetinu stupně. Určí se střední hodnota ze šesti vypočtených absolutních hodnot „A“ a zaokrouhlí se na nejbližší desetinu stupně, což je konečná výsledná hodnota „A“, která je nadále používána. |
5.7 Jakmile byla určena hodnota „A“, vykoná se bezprostředně před zkouškou sinusového natáčení volantu s následující prodlevou podle bodu 5.9 postup přípravy pneumatik popsaný v bodě 5.5, aniž by se pneumatiky vyměnily. První série zkoušek sinusového natáčení volantem s následující prodlevou musí začít nejpozději do dvou hodin od ukončení zkoušek s pomalu se zvětšujícím úhlem natočení volantu podle bodu 5.6.
5.8 Zkontroluje se, že systém ESC je zapnut, a to ověřením, že sdělovač chybné funkce ESC ani sdělovač „ESC OFF“ (pokud existuje) nejsou rozsvíceny.
5.9 Zkouška se sinusovým natáčením volantu s následující prodlevou k ověření zásahu proti přetáčivosti a k ověření odezvy
S vozidlem se vykonají dvě série zkoušek se vstupem na volantu ve formě sinusové vlny s frekvencí 0,7 Hz a s prodlevou 500 ms začínající na druhém vrcholu amplitudy, jak je znázorněno na obrázku 2 (zkouška sinusového natáčení volantu s následující prodlevou). U jedné série se volant natáčí proti směru pohybu hodinových ručiček v první polovině cyklu, u druhé série se volant natáčí ve směru pohybu hodinových ručiček v první polovině cyklu. Mezi každými z dílčích zkoušek se stojící vozidlo nechá ochladit po dobu 1,5 až 5 minut.
Obrázek 2
Sinusové natáčení volantu s následující prodlevou
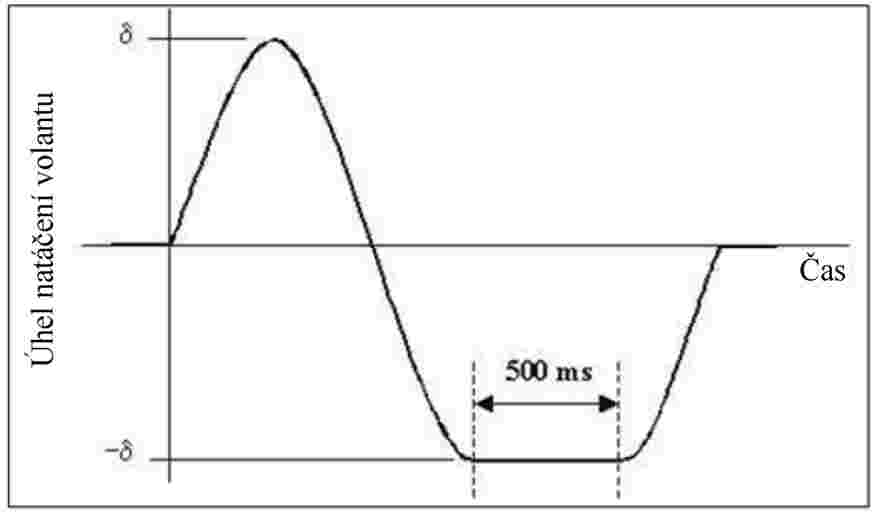
|
5.9.1 |
Volant se začne natáčet, když se vozidlo pohybuje volným dojezdem, se zařazeným nejvyšším rychlostním stupněm a rychlostí 80 km/h ± 2 km/h. |
|
5.9.2 |
U počáteční zkoušky z každé série zkoušek je amplituda natáčení volantu 1,5 A, kde A je úhel natočení volantu zjištěný podle bodu 5.6.1. |
|
5.9.3 |
V každé sérii zkušebních jízd se amplituda natáčení volantu zvětšuje od jízdy k jízdě o 0,5 A, za podmínky, že u žádné takové zkušební jízdy nedojde k amplitudě natáčení volantu větší než při konečné zkušební jízdě specifikované v bodě 5.9.4. |
|
5.9.4 |
Amplituda natáčení řízení poslední zkušební jízdy v každé sérii je větší z hodnot 6,5 A nebo 270 °, za podmínky, že vypočtená hodnota 6,5 A je nejvýše 300 °. Jestliže kterýkoli přírůstek o hodnotě 0,5 A, a to až do 6,5 A, má za následek hodnotu větší než 300 °, musí mít amplituda natáčení řízení v poslední zkušební jízdě hodnotu 300 °. |
|
5.9.5 |
Po ukončení dvou sérií zkušebních jízd se následně zpracují údaje rychlosti stáčení a bočního zrychlení, jak je uvedeno v bodě 5.11. |
5.10 Zjištění chybné funkce ESC
|
5.10.1 |
Odpojením zdroje napájení ke kterékoli části ESC nebo rozpojením kteréhokoli elektrického spojení mezi částmi ESC (při přerušeném napájení) se simuluje jedna nebo více chybných funkcí ESC. Při simulaci chybné funkce ESC se nerozpojí elektrická spojení sdělovače/sdělovačů a/nebo volitelný ovladač/ovladače systému ESC. |
|
5.10.2 |
U stojícího vozidla a se systémem zámku zapalování v poloze „uzamknuto“ nebo „vypnuto“ se uvede systém zámku zapalování do polohy „start“ a nastartuje se motor. S vozidlem se jede tak, aby dosáhlo rychlost 48 km/h ± 8 km/h za nejdéle 30 sekund od startu motoru a v průběhu následujících dvou minut se při této rychlosti vykoná nejméně jeden mírný zatáčecí manévr doleva a jeden doprava, bez ztráty směrové stability, a jedno zabrzdění. Ověří se, že se na konci těchto manévrů rozsvítí sdělovač chybné funkce ESC podle bodu 3.4. |
|
5.10.3 |
Vozidlo se zastaví, systém zámku zapalování se uvede do polohy „vypnuto“ nebo „uzamknuto“. Po uplynutí pěti minut se uvede systém zámku zapalování do polohy „start“ a nastartuje se motor. Ověří se, že sdělovač chybné funkce ESC se opět rozsvítí, aby signalizoval chybnou funkci, a zůstane rozsvícen tak dlouho, dokud motor běží, nebo dokud není chybná funkce opravena. |
|
5.10.4 |
Systém zámku zapalování se uvede do polohy „vypnuto“ nebo „uzamknuto“. Systém ESC se uvede do stavu normální funkce, systém zámku zapalování se uvede do polohy „start“ a nastartuje se motor. Znovu se vykoná manévr popsaný v bodě 5.10.2 a ověří se, že sdělovač zhasne, jakmile se manévr ukončí, nebo bezprostředně potom. |
5.11 Zpracování údajů po zkoušce – výpočty výsledků
Měření a výpočty rychlosti stáčení a bočního posuvu se vyhodnotí podle metod specifikovaných v bodech 5.11.1 až 5.11.8.
|
5.11.1 |
Neupravená data úhlu natočení volantu se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 10 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou. |
|
5.11.2 |
Neupravená data rychlosti stáčení se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 6 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou. |
|
5.11.3 |
Neupravená data bočního zrychlení se filtrují dvanáctipólovým bezfázovým filtrem podle Butterwortha a s mezním kmitočtem 6 Hz. U filtrovaných dat se pak nastaví nula, aby se odstranil posun údajů snímače, s použitím statických údajů zjištěných před zkouškou. Data bočního zrychlení v těžišti vozidla se určí odečtením účinků klopení karoserie vozidla a korekcí údajů v závislosti na umístění snímače s použitím transformace souřadnic. K získávání dat se musí akcelerometr pro boční zrychlení umístit co nejblíže k podélnému a příčnému těžišti vozidla. |
|
5.11.4 |
Rychlost natáčení volantu se určí derivací filtrovaných hodnot úhlu natočení volantu. Data úhlové rychlosti volantu se pak filtrují filtrem s klouzavou střední hodnotou měnící se vždy o 0,1 s. |
|
5.11.5 |
U kanálů pro data bočního zrychlení, rychlosti stáčení a úhlu natočení volantu se pak nastaví nula s použitím definovaného „rozsahu nulování“. Metody, které se použijí ke stanovení rozsahu nulování, jsou uvedeny v bodech 5.11.5.1 a 5.11.5.2.
|
|
5.11.6 |
Počátek manévru řízení je definován jako první okamžik, v kterém filtrovaná a k nule nastavená data úhlu natočení volantu dosáhnou –5 ° (pokud se počáteční akce na volant děje ve směru proti pohybu hodinových ručiček) nebo +5 ° (pokud se počáteční akce na volant děje ve směru pohybu hodinových ručiček) po uplynutí doby definující konec „rozsahu nulování“. Čas v okamžiku začátku manévru řízení se vypočte interpolací. |
|
5.11.7 |
Ukončení manévru řízení je definováno jako okamžik, kdy se úhel natáčení volantu vrátí zpět na nulu na konci sinusového natáčení volantu s prodlevou. Čas v okamžiku nulového natočení volantu se vypočte interpolací. |
|
5.11.8 |
Druhý vrchol rychlosti stáčení je definován jako první vrchol rychlosti stáčení vzniklý natáčením volantu v opačném směru. Rychlosti stáčení v době 1 000 a 1 750 sekund se po ukončení manévru řízení určí interpolací. |
|
5.11.9 |
Určí se boční rychlost integrací dat bočního zrychlení, která byla korigována, filtrována a u nichž byla nastavena nula. Nulová boční rychlost je vztažena k okamžiku začátku manévru řízení. Určí se boční posuv integrováním boční rychlosti, u níž byla nastavena nula. Nulový boční posuv je vztažen k okamžiku začátku manévru řízení. Boční posuv za 1,07 sekund od okamžiku začátku manévru řízení se určí interpolací. |
B. ZVLÁŠTNÍ POŽADAVKY NA BRZDOVÝ ASISTENČNÍ SYSTÉM, POKUD JE NA VOZIDLE
1. OBECNĚ
Následující požadavky platí pro vozidla vybavená brzdovým asistenčním systémem (BAS), který je definován v bodě 2.34 tohoto předpisu a je uveden v osvědčení o schválení podle přílohy 1 bodu 22 tohoto předpisu.
Kromě požadavků této přílohy platí pro brzdové asistenční systémy všechny příslušné požadavky uvedené kdekoli v tomto předpise.
Kromě požadavků této přílohy musí být vozidla s BAS vybavena také protiblokovacím brzdovým systémem podle přílohy 6.
1.1 Všeobecné charakteristiky účinků systémů BAS kategorie „A“
Když byly detekovány podmínky nouzového brzdění při poměrně vysoké síle působící na pedál, sníží se doplňková síla potřebná k vyvolání plného cyklování protiblokovacího zařízení v porovnání se silou na pedál, která by byla potřebná, kdyby systém BAS nebyl v činnosti.
Splnění tohoto požadavku se prokáže splněním ustanovení uvedených v bodech 3.1 až 3.3 této části.
1.2 Všeobecné charakteristiky účinků systémů BAS kategorie „B“ a „C“
Když byly detekovány podmínky nouzového brzdění, nejméně velmi rychlým sešlápnutím pedálu, musí systém BAS zvětšit tlak tak, aby došlo k maximálnímu dosažitelnému brzdnému zpomalení nebo k plnému cyklování protiblokovacího zařízení.
Splnění tohoto požadavku se prokáže splněním ustanovení uvedených v bodech 4.1 až 4.3 této části.
2. VŠEOBECNÉ ZKUŠEBNÍ POŽADAVKY
2.1 Proměnné veličiny
Při provádění zkoušek popsaných v části B této přílohy se měří následující proměnné veličiny:
|
2.1.1 |
síla působící na brzdový pedál, Fp; |
|
2.1.2 |
rychlost vozidla, vx; |
|
2.1.3 |
zpomalení vozidla, ax; |
|
2.1.4 |
teplota brzdy, Td; |
|
2.1.5 |
tlak v brzdovém potrubí P, kde přichází v úvahu; |
|
2.1.6 |
zdvih pedálu Sp, měřený ve středu plochy pedálu nebo v místě pedálového mechanismu, kde je posuv úměrný zdvihu středu plochy pedálu a kde se měření jednoduše kalibruje. |
2.2 Měřící zařízení
|
2.2.1 |
Proměnné veličiny uvedené v bodě 2.1 této části se měří příslušnými snímači. Přesnost, pracovní rozsahy, techniky filtrování, zpracování údajů a ostatní požadavky jsou popsány v normě ISO 15037-1: 2006. |
|
2.2.2. |
Přesnost měření síly působící na pedál a teploty kotouče musí být:
|
|
2.2.3 |
Podrobnosti o analogovém a digitálním zpracování dat v rámci postupů zkoušek BAS jsou popsány v dodatku 5 k této příloze. Požaduje se vzorkovací frekvence odběru dat nejméně 500 Hz. |
|
2.2.4 |
Metody měření, které jsou alternativní k metodám uvedeným v bodě 2.2.3, se mohou připustit, pokud se prokáže, že mají nejméně rovnocennou úroveň přesnosti |
2.3 Zkušební podmínky
|
2.3.1 |
Zatížení zkoušeného vozidla: vozidlo musí být nenaložené. Kromě řidiče v něm může být další osoba na předním sedadle, která je odpovědná za zaznamenávání výsledků zkoušek. |
|
2.3.2 |
Zkoušky brzdění se vykonají na suchém povrchu s dobrou adhezí. |
2.4 Zkušební metoda
|
2.4.1 |
Zkoušky, popsané v kapitolách 3 a 4 tohoto oddílu, se provedou při počáteční rychlosti 100 ± 2 km/h. Vozidlo se zkušební rychlostí pohybuje po přímce. |
|
2.4.2 |
Průměrná teplota brzd musí být v souladu s bodem 1.4.1.1 přílohy 3. |
|
2.4.3 |
Pro účely zkoušek je referenční čas (t0) definován jako okamžik, kdy síla na brzdový pedál dosáhne hodnoty 20 N.
|
3. POSOUZENÍ EXISTENCE KATEGORIE „A“ SYSTÉMU BAS
Kategorie „A“ systému BAS musí vyhovovat zkušebním požadavkům uvedeným v bodech 3.1 a 3.2.
3.1 Zkouška 1: Referenční zkouška ke stanovení FABS a aABS.
|
3.1.1 |
Referenční hodnoty FABS a aABS se stanoví postupem popsaným v dodatku 4 k této příloze. |
3.2 Zkouška 2: Uvedení systému BAS do činnosti
|
3.2.1 |
Jakmile byla zjištěna situace nouzového brzdění, systémy, které jsou citlivé na sílu působící na pedál, musí vykázat významný nárůst poměru mezi:
|
|
3.2.2 |
Požadavky na výkon u systému BAS kategorie „A“ jsou splněny, pokud je možné definovat specifickou charakteristiku stlačení brzdy, která umožňuje 40 až 80 % snížení síly, kterou je potřeba působit na pedál pro (FABS – FT) v porovnání s (FABS extrapolated – FT). |
|
3.2.3 |
FT a aT jsou prahová síla a prahové zpomalení, jak je znázorněné na obrázku 1. Hodnoty FT a aT musí být poskytnuty technické zkušebně během předložení žádosti o schválení typu. Hodnota aT musí být mezi 3,5 m/s2 a 5,0 m/s2. |
|
3.2.4 |
Zakreslí se přímka spojující počátek s bodem o souřadnicích FT, aT (viz obrázek 1a). Hodnota síly působící na pedál „F“ v bodě průsečíku mezi touto přímkou a vodorovnou přímkou definovanou jako a = aABS je definována jako FABS, extrapolated:
|

|
3.2.5 |
Jako alternativa, která může být zvolena výrobcem v případě vozidel kategorií N1 nebo M1, odvozená od vozidel kategorie N1 s celkovou maximální hmotností > 2 500 kg, mohou být hodnoty síly působící na pedál FT, FABS,min, FABS,max a FABS,extrapolated odvozeny z charakteristiky odezvy tlaku v okruhu brzd a nikoli z charakteristik zpomalení vozidla. Uvedené hodnoty musí být měřeny v době, kdy se síla působící na pedál zvyšuje.
|
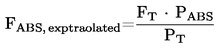
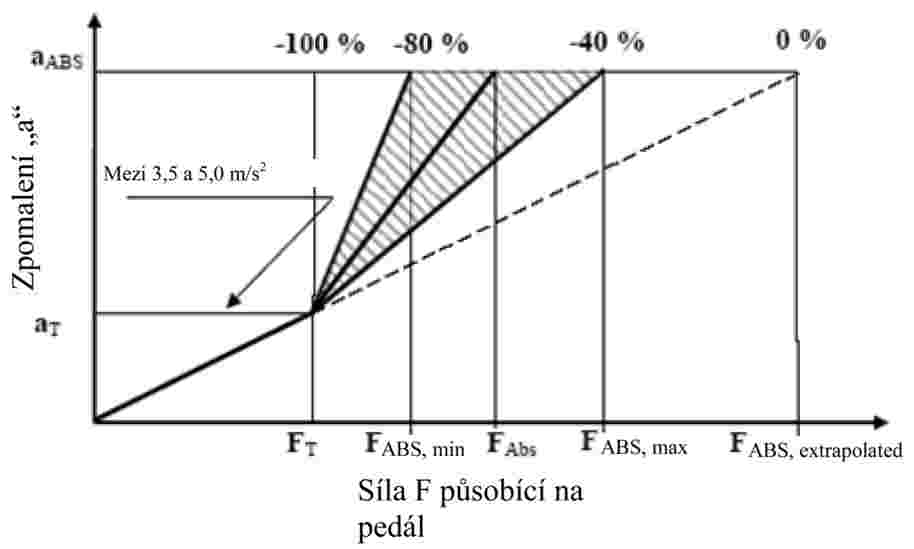
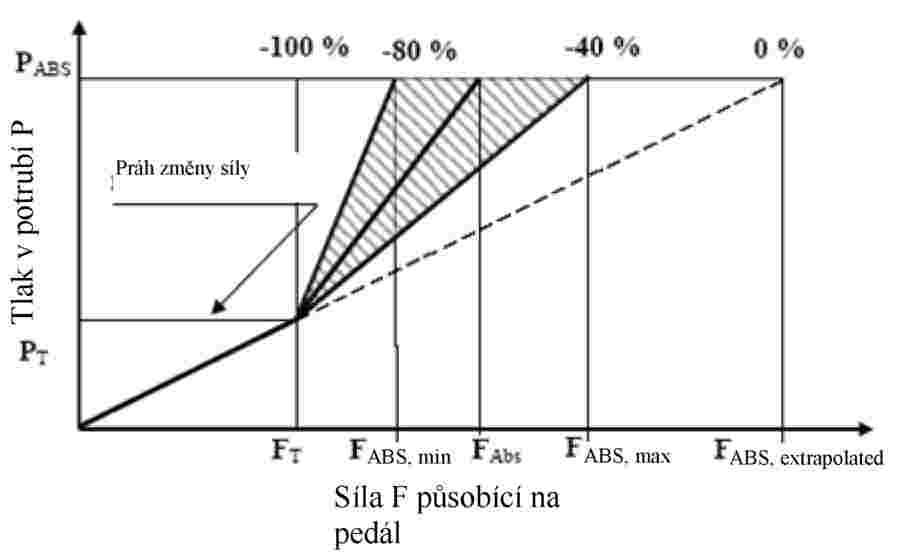
3.3 Vyhodnocení změřených hodnot
Existence systému BAS kategorie „A“ je prokázána, pokud:
FABS,min ≤ FABS ≤ FABS,max
kde:
FABS,max – FT ≤ (FABS,extrapolated – FT) · 0,6
a dále
FABS,min – FT ≥ (FABS,extrapolated – FT) · 0,2
4. POSOUZENÍ EXISENCE KATEGORIE „B“ SYSTÉMU BAS
Kategorie „B“ systému BAS musí vyhovovat zkušebním požadavkům uvedeným v bodech 4.1 a 4.2 tohoto oddílu.
4.1 Zkouška 1: Referenční zkouška ke stanovení FABS a aABS.
|
4.1.1 |
Referenční hodnoty FABS a aABS se stanoví postupem popsaným v dodatku 4 k této příloze. |
4.2 Zkouška 2: Uvedení systému BAS do činnosti
Vozidlo musí být řízeno po přímce při zkušební rychlosti uvedené v bodě 2.4 tohoto oddílu. Řidič rychle stlačí pedál brzdy podle obrázku 2, čímž je simulováno nouzové brzdění, takže je aktivován systém BAS a systém ABS plně cykluje.
Aby byl systém BAS aktivován, musí být brzdový pedál stlačen tak, jak je specifikováno výrobcem vozidla. Výrobce uvědomí technickou zkušebnu o vyžadované hodnotě působení na pedál při podání žádosti o schválení typu. Ke spokojenosti technické zkušebny musí být prokázáno, že systém BAS je aktivován za podmínek stanovených výrobcem v souladu s body 22.1.2 a 22.1.3 přílohy 1.
Poté, co t = t0 + 0,8 s a dokud vozidlo nezpomalí na rychlost 15 km/h, musí být brzdový pedál udržován v pásmu FABS, upper a FABS, lower, kde FABS, upper je 0,7 FABS a FABS, lower je 0,5 FABS.
Požadavky se považují za splněné, pokud se poté, co t = t0 + 0,8 s, se síla působící na pedál sníží pod hodnotu FABS, lower, za podmínky, že je splněn požadavek uvedený v bodě 4.3.
4.3 Vyhodnocení změřených hodnot
Existence systému BAS kategorie „B“ je prokázána, pokud průměrné zpomalení (aBAS) o hodnotě alespoň 0,85 · aABS je udržováno od okamžiku, kdy t = t0 + 0,8 s, do okamžiku, kdy se rychlost snížila na 15 km/h.
Obrázek 2
Příklad zkoušky 2 u systému BAS kategorie „B“
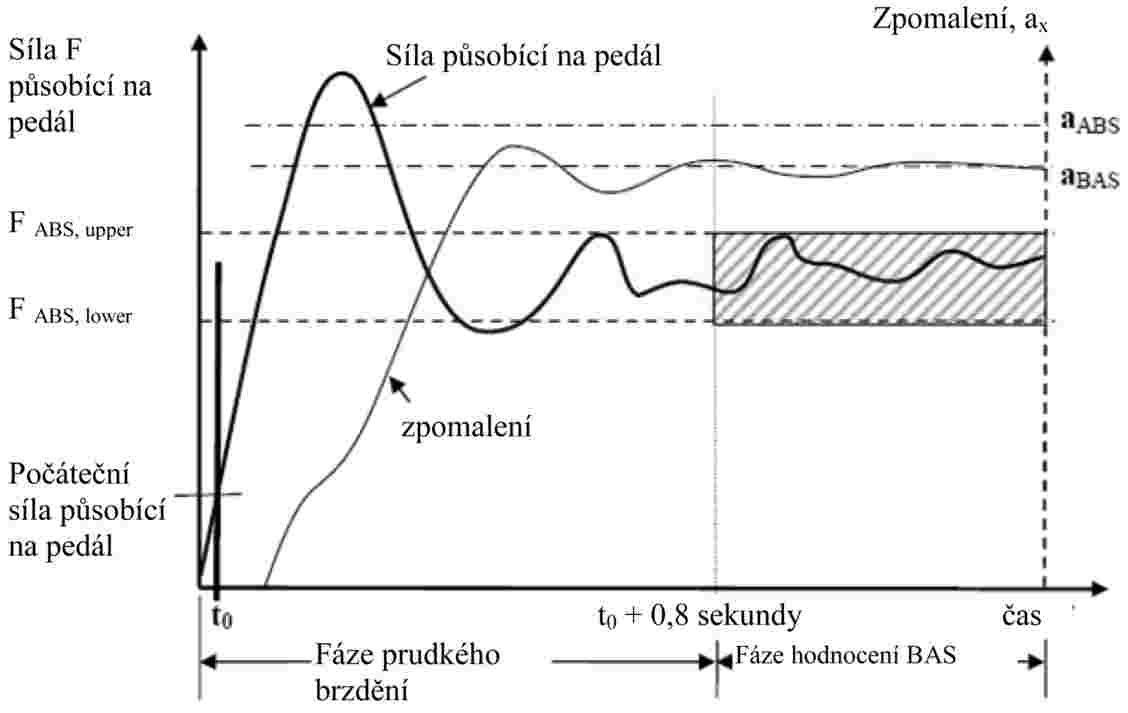
5. POSOUZENÍ EXISTENCE KATEGORIE „C“ SYSTÉMU BAS
5.1 Kategorie „C“ systému BAS musí vyhovovat zkušebním požadavkům uvedeným v bodech 4.1 a 4.2 tohoto oddílu.
5.2 Vyhodnocení změřených hodnot
Kategorie „C“ systému BAS musí vyhovovat požadavkům uvedeným v bodě 4.3 tohoto oddílu.
(1) Skupina náprav je posuzována jako jednoduchá náprava a dvojité kolo jako kolo jednoduché.
(2) Znění této přílohy vychází z toho, že řízení vozidla je prováděno volantem. Vozidla používající jiný druh řízení mohou být v souladu s touto přílohou také schválena, pokud je výrobce schopen prokázat technické zkušebně, že požadavků na účinnost uvedených v této příloze může být dosaženo použitím vstupů řidiče ekvivalentním vstupům uvedeným v bodě 5 tohoto oddílu.
(3) „Jmenovitou“ hodnotou se rozumí teoretická cílová hodnota.
(4) Použije se, jak je stanoveno v bodě 3.2.5.
DODATEK 1
POUŽITÍ SIMULACE DYNAMICKÉ STABILITY
Účinky systému elektronického řízení stability se mohou určit počítačovou simulací.
1. POUŽITÍ SIMULACE
|
1.1 |
Výrobce vozidla prokáže stabilitní funkci vozidla orgánu pro schválení typu nebo technické zkušební simulací dynamických manévrů podle bodu 5.9 přílohy 9. |
|
1.2 |
Simulace je prostředkem, kterým se prokážou stabilitní vlastnosti vozidla těmito veličinami:
|
|
1.3 |
Simulace se provede s potvrzeným modelovacím a simulačním nástrojem a s použitím dynamických manévrů podle bodu 5.9 přílohy 9 a za podmínek zkoušek podle bodu 4 přílohy 9. Metoda, kterou se potvrdí simulační nástroj, je stanovena v dodatku 2 k této příloze. |
DODATEK 2
SIMULAČNÍ NÁSTROJ DYNAMICKÉ STABILITY A POTVRZENÍ JEHO PLATNOSTI
1. SPECIFIKACE SIMULAČNÍHO NÁSTROJE
|
1.1 |
Metoda simulace musí vzít v úvahu hlavní faktory, které ovlivňují směrový a klopný pohyb vozidla. Typický model může obsahovat následující parametry vozidla v explicitním nebo implicitním tvaru:
|
|
1.2 |
Stabilitní funkce vozidla se přidá do simulačního modelu prostřednictvím:
|
2. POTVRZENÍ PLATNOSTI SIMULAČNÍHO NÁSTROJE
|
2.1 |
Platnost použitého modelovacího a simulačního nástroje se ověří porovnáním s praktickými zkouškami vozidla. Jako zkoušky k potvrzení platnosti se použijí dynamické manévry podle bodu 5.9 přílohy 9. V průběhu zkoušek se následující kinematické proměnné, v závislosti na případu, registrují nebo vypočtou podle normy ISO 15037, část 1:2005: Všeobecné podmínky pro osobní automobily, nebo část 2:2002: Všeobecné podmínky pro těžká vozidla a autobusy (v závislosti na kategorii vozidla):
|
|
2.2 |
Cílem je prokázat, že simulované chování vozidla a činnost stabilitní funkce vozidla jsou srovnatelné s tím, co bylo zjištěno v praktických zkouškách vozidla. |
|
2.3 |
Simulátor se pokládá za potvrzený, když je jeho výstup srovnatelný s výsledky praktických zkoušek provedených s daným typem vozidla v průběhu dynamických manévrů podle bodu 5.9 přílohy 9. Prostředkem k porovnání je činnost a postup stabilitní funkce vozidla při simulaci a v praktických zkouškách vozidla. |
|
2.4 |
Fyzikální parametry, které jsou rozdílné mezi konfiguracemi referenčního vozidla a simulovaného vozidla, se musí při simulaci příslušně upravit. |
|
2.5 |
Vypracuje se zpráva o zkoušce simulací, jejíž vzor je uveden v dodatku 3 k této příloze a jejíž výtisk se připojí ke zprávě o schválení. |
DODATEK 3
ZPRÁVA O ZKOUŠCE SIMULAČNÍHO NÁSTROJE PRO STABILITNÍ FUNKCI VOZIDLA
Číslo zprávy o zkoušce: …
1. Identifikace
|
1.1 |
Název a adresa výrobce simulačního nástroje: … |
|
1.2 |
Identifikace simulačního nástroje: název/model/číslo (hardware a software): … |
2. Rozsah použití
|
2.1 |
Typ vozidla: … |
|
2.2 |
Konfigurace vozidla: … |
3. Ověřovací zkouška vozidla
|
3.1 |
Popis vozidla/vozidel: …
|
|
3.2 |
Popis místa/míst, vlastnosti povrchu silnice/zkušební dráhy, teplota a datum/data: |
|
3.3 |
Výsledky se stabilitní funkcí vozidla zapnutou a vypnutou, včetně příslušných kinematických proměnných uvedených v příloze 9 dodatku 2 bodě 2.1: … |
4. Výsledky simulace
|
4.1 |
Parametry vozidla a hodnoty použité v simulaci, které nebyly převzaty ze skutečného zkoušeného vozidla (implicitně): … |
|
4.2 |
Stabilita z hlediska stáčení a bočního posuvu podle bodů 3.1 až 3.3 přílohy 9: |
5. Tato zkouška byla vykonána a výsledky byly uvedeny podle dodatku 2 k příloze 9 předpisu č. 13-H naposledy změněného doplňkem 7.
Technická zkušebna, která provedla zkoušky (1)…
Podpis: …Datum: …
Schvalující orgán (1)…
Podpis: …Datum: …
(1) Pokud je technická zkušebna a schvalující orgán stejná organizace, musí být podepsány různé osoby.
DODATEK 4
METODA K URČENÍ FABS A aABS
|
1.1 |
Síla na brzdový pedál FABS je minimální silou působení na pedál, která se musí použít u daného vozidla, aby se dosáhlo maximální zpomalení, které znamená, že ABS plně cykluje. Veličina aABS je zpomalení daného vozidla v průběhu zpomalení s ABS, jak je definováno v bodě 1.7. |
|
1.2 |
Brzdový pedál se pomalu sešlapuje (bez aktivace systému BAS kategorie B nebo kategorie C) tak, aby se zpomalení konstantně zvětšovalo až do dosažení plného cyklování ABS (obrázek 3). |
|
1.3 |
Plné zpomalení musí být dosaženo v časovém pásmu 2,0 s ± 0,5 s. Křivka zpomalení zaznamenaná v závislosti na čase musí být v pásmu ±0,5 s od střednice pásma křivky zpomalení. V příkladu znázorněném na obrázku 3 má střednice počátek v čase t0 a průsečík s čarou aABS v čase 2 sekundy. Jakmile bylo jednou dosaženo plné zpomalení, nesmí se zmenšit zdvih pedálu Sp nejméně po dobu 1 sekundy. Čas, ve kterém dojde k plné činnosti systému ABS, je definován jako čas, kdy se dosáhne síly na pedál FABS. Měřené hodnoty musí být v pásmu kolísání nárůstu zpomalení (viz obrázek 3). Obrázek 3 Pásmo zpomalení pro určení FABS a aABS
|
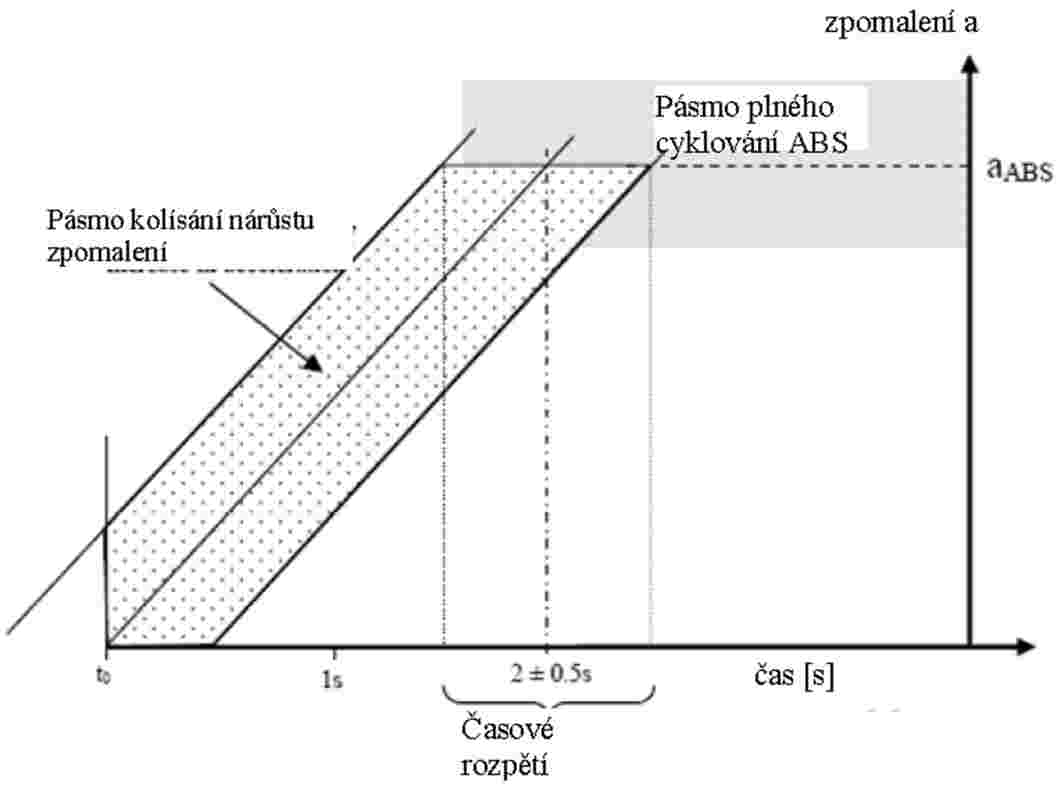
|
1.4 |
Vykoná se pět zkoušek splňujících požadavky bodu 1.3. Pro každou z těchto platných zkoušek se vynese zpomalení vozidla jako funkce zaznamenané síly na brzdový pedál. K výpočtům popsaným v následujících bodech se použijí jen údaje zaznamenané při rychlostech vyšších než 15 km/h. |
|
1.5 |
K určení aABS a FABS se použije nízkofrekvenční filtr 2 Hz pro zpomalení vozidla a pro sílu působící na pedál. |
|
1.6 |
Pět jednotlivých křivek závislosti zpomalení na síle na brzdový pedál se zprůměruje tak, že se vypočte střední zpomalení z pěti jednotlivých křivek závislosti zpomalení na síle na brzdový pedál, po stupních přírůstku síly na pedál 1 N. Výsledkem je křivka středního zpomalení v závislosti na síle na brzdový pedál, která se označuje v tomto dodatku jako „křivka maF“. |
|
1.7 |
Maximální hodnota zpomalení vozidla se určí z křivky maF a označí se jako „amax“. |
|
1.8 |
Všechny hodnoty křivky maF, které jsou nad 90 % hodnoty zpomalení amax,se zprůměrují. Tato hodnota „a“ je zpomalením aABS, které je uváděno v tomto dodatku. |
|
1.9 |
Minimální síla na pedál FABS postačující k dosažení zpomalení aABS je definována jako hodnota F, která odpovídá hodnotě a = aABS na křivce maF. |
DODATEK 5
ZPRACOVÁNÍ ÚDAJŮ PRO SYSTÉM BAS
(viz bod 2.2.3 oddílu B této přílohy)
1. ANALOGOVÉ ZPRACOVÁNÍ ÚDAJŮ
Celková šířka pásma kombinovaného systému snímače/záznamu nesmí být menší než 30 Hz.
K nutnému filtrování signálů se použijí nízkofrekvenční filtry s řádem 4 nebo vyšším. Šířka propustného pásma (od 0 Hz do kmitočtu fo při –3 dB) nesmí být menší než 30 Hz. Chyby amplitudy musí být menší než ±0,5 % v příslušném kmitočtovém rozsahu od 0 Hz do 30 Hz. Všechny analogové signály se musí zpracovávat filtry, které mají dostatečně podobné fázové charakteristiky, aby se zajistilo, že rozdíly v časových prodlevách způsobené filtrováním jsou v požadovaných mezích přesnosti pro měření času.
Pozn.: V průběhu analogového filtrování signálů s rozdílnými kmitočtovými obsahy může dojít k fázovým posunům. Proto má přednost metoda zpracování údajů popsaná v bodě 2 tohoto dodatku.
2. DIGITÁLNÍ ZPRACOVÁNÍ ÚDAJŮ
2.1 Všeobecné posouzení
Příprava analogových signálů zahrnuje posouzení tlumení amplitudy filtrem a frekvence vzorkování za účelem vyhnout se chybám způsobeným vzorkováním, fázovému zpoždění způsobenému filtrem a časovým prodlevám. Posouzení vzorkování a digitalizace zahrnuje zesílení signálů před vzorkováním, aby se minimalizovaly chyby způsobené digitalizací; počet bitů na vzorek, počet vzorků na cyklus; zesilovače vzorků; a uchovávání dat a časové rozložení vzorků. Posouzení doplňkového bezfázového digitálního filtrování zahrnuje výběr propustných a nepropustných pásem a tlumení a přípustné zvlnění v každém z nich a korekci fázového zpoždění způsobeného filtrem. Je nutno posoudit každý z těchto faktorů tak, aby se dosáhla relativní celková přesnost ±0,5 %.
2.2 Chyby vzorkování (aliasing)
Za účelem vyhnout se nekorigovatelným chybám způsobeným vzorkováním se musí analogové signály vhodně filtrovat před vzorkováním a digitalizací. Řád použitých filtrů a jejich pásmo propustnosti se musí zvolit jak podle požadované plochosti v příslušném kmitočtovém rozsahu, tak podle frekvence vzorkování.
Minimální charakteristiky filtru a frekvence vzorkování musí být takové, aby:
|
a) |
v příslušném kmitočtovém rozsahu od 0 Hz do fmax = 30 Hz bylo tlumení menší, než je rozlišovací schopnost systému sběru dat; a dále |
|
b) |
při polovině vzorkovací frekvence (tj. Nyquistovy nebo „mezní“ frekvence) byly velikosti všech frekvenčních složek signálu a šum redukovány na méně, než je rozlišovací schopnost systému. |
Pro rozlišovací schopnost 0,05 % musí být tlumení filtru menší než 0,05 % ve frekvenčním rozsahu mezi 0 Hz a 30 Hz a tlumení musí být větší než 99,95 % při všech frekvencích větších než polovina vzorkovací frekvence.
Pozn.: Pro Butterworthův filtr je tlumení dáno vzorci:
 a
a 
kde:
n je řád filtru
fmax je příslušný frekvenční rozsah (30 Hz)
fo je mezní frekvence filtru
fN je Nyquistova nebo „mezní“ frekvence
Pro filtr čtvrtého řádu
pro A = 0,9995: fo = 2,37 · fmax
pro A = 0,0005: fS = 2 · (6,69 · fo), kde fS je vzorkovací frekvence = 2 · fN
2.3 Fázové posuvy filtrů a zpoždění pro filtrování anti-aliasing
Zabrání se nadměrnému analogovému filtrování a všechny filtry mají dostatečně podobnou fázovou charakteristiku, aby se zajistilo, že rozdílná zpoždění odpovídají požadované přesnosti měření času. Fázové posuvy jsou zejména významné v případech, kdy jsou naměřené proměnné společně vynásobeny, aby vytvořily nové proměnné, protože při násobení amplitud se fázové posuvy a související zpoždění sčítají. Fázové posuvy a zpoždění se sníží zvýšením fo. Jsou-li známy rovnice popisující filtry před vzorkováním, je vhodné odstranit jejich fázové posuvy a zpoždění jednoduchými algoritmy provedenými ve frekvenční doméně.
Pozn.: Ve frekvenčním rozsahu, v němž zůstávají charakteristiky amplitudy filtru ploché, je možné aproximovat fázový posuv Φ Butterworthova filtru takto:
Φ = 81 · (f/f0) stupňů pro druhý řád
Φ = 150 · (f/f0) stupňů pro čtvrtý řád
Φ = 294 · (f/f0) stupňů pro osmý řád
Časové zpoždění pro všechny řády filtrů činí: t = (Φ/360) · (1/f0)
2.4 Sběr a digitalizace dat
Při 30 Hz se amplituda signálu mění každou milisekundu až o 18 %. V zájmu omezení dynamických chyb způsobených změnou analogových vstupů na 0,1 % musí být čas vzorkování nebo digitalizace kratší než 32 μs. Všechny páry nebo soubory datových vzorků, které mají být srovnávány, se použijí současně nebo v dostatečně krátkém časovém úseku.
2.5. Požadavky na systém
Datový systém má rozlišení 12 bitů (±0,05 %) nebo více a přesnost 2 LSB (±0,1 %). Filtry anti-aliasing jsou řádu 4 nebo vyššího a příslušný rozsah dat fmax činí 0 Hz až 30 Hz.
U filtrů čtvrtého řádu je frekvence pásma propusti fo (od 0 Hz do frekvence fo) vyšší než 2,37 · fmax, pokud jsou chyby fáze následně upraveny při digitálním zpracování dat, a v jiných případech vyšší než 5 · fmax. U filtrů čtvrtého řádu je vzorkovací frekvence fs větší než 13,4 · fo.