(EU) 2019/1213Prováděcí nařízení Komise (EU) 2019/1213 ze dne 12. července 2019, kterým se stanoví podrobná ustanovení zajišťující jednotné podmínky při zavádění interoperability a kompatibility palubních zařízení pro zjišťování hmotnosti podle směrnice Rady 96/53/ES (Text s významem pro EHP.)
| Publikováno: | Úř. věst. L 192, 18.7.2019, s. 1-22 | Druh předpisu: | Prováděcí nařízení |
| Přijato: | 12. července 2019 | Autor předpisu: | Evropská komise |
| Platnost od: | 7. srpna 2019 | Nabývá účinnosti: | 27. května 2021 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
PROVÁDĚCÍ NAŘÍZENÍ KOMISE (EU) 2019/1213
ze dne 12. července 2019,
kterým se stanoví podrobná ustanovení zajišťující jednotné podmínky při zavádění interoperability a kompatibility palubních zařízení pro zjišťování hmotnosti podle směrnice Rady 96/53/ES
(Text s významem pro EHP)
EVROPSKÁ KOMISE,
s ohledem na Smlouvu o fungování Evropské unie,
s ohledem na směrnici Rady 96/53/ES ze dne 25. července 1996 (1), a zejména na čl. 10d odst. 5 uvedené směrnice,
vzhledem k těmto důvodům:
|
(1) |
Palubní zařízení pro zjišťování hmotnosti představují pro členské státy způsob kontroly vozidel nebo souprav vozidel, jež by mohly být přetíženy, stanovený směrnicí 96/53/ES. |
|
(2) |
V souladu s čl. 10d odst. 5 druhým pododstavcem směrnice 96/53/ES musí být palubní zařízení pro zjišťování hmotnosti v zájmu zajištění interoperability schopna v kterémkoli okamžiku přenášet údaje o hmotnosti z jedoucího vozidla příslušným orgánům a řidiči, a to pomocí rozhraní definovaného v normách CEN DSRC. Proto by měly být přijaty technické specifikace, jimiž bude obsah norem přizpůsoben zvláštnostem informací, které mají být poskytovány palubními zařízeními pro zjišťování hmotnosti. |
|
(3) |
Palubní zařízení pro zjišťování hmotnosti mohou být namontována do motorových vozidel i přívěsů a návěsů. Je třeba zaručit, aby palubní zařízení pro zjišťování hmotnosti namontovaná v různých vozidlech soupravy vozidel byla vzájemně kompatibilní. Kompatibilita by měla být zajištěna prováděním evropských norem pro C-ITS uvedených v aktu v přenesené pravomoci, kterým se doplňuje směrnice Evropského parlamentu a Rady 2010/40/EU (2), pokud jde o zavádění a provozní využití kooperativních inteligentních dopravních systémů. |
|
(4) |
Členské státy, které zavedou povinnou instalaci palubních zařízení pro zjišťování hmotnosti, by měly mít možnost z této povinnosti vyjmout vozidla nebo soupravy vozidel, u nichž není možné překročit maximální povolenou hmotnost, jako jsou přívěsy nebo návěsy navržené speciálně pro přepravu kapalin nebo hospodářských zvířat. |
|
(5) |
Používání palubních zařízení pro zjišťování hmotnosti pro účely prosazování právních předpisů může vyvolat pokusy o manipulaci, jako je tomu v případě dalších systémů pro vozidla, například u digitálních tachografů nebo systémů pro omezování emisí. S cílem zachovat přiměřenou úroveň zabezpečení proti manipulaci musí být komunikace mezi motorovým vozidlem a přívěsem nebo návěsem zabezpečená. Dále by palubní zařízení pro zjišťování hmotnosti měla být certifikována v souladu se všeobecnými kritérii certifikačním orgánem, který je uznán řídícím výborem v rámci „dohody o vzájemném uznávání osvědčení o posuzování informací o technologické bezpečnosti“ skupiny vyšších úředníků pro bezpečnost informačních systémů (SOG-IS). |
|
(6) |
Členské státy, které se rozhodnou pro instalaci palubních zařízení pro zjišťování hmotnosti ve vozidlech, by měly zajistit, aby daná zařízení v těchto vozidlech byla kontrolována v dílnách specializovaných na OBW. S cílem zajistit jednotné provádění pravidel pro interoperabilitu stanovených v tomto nařízení by tyto dílny měly zaručit, že palubní zařízení fungují s odpovídající úrovní přesnosti. S výhradou nezbytných úprav mohou být těmito dílnami stanice technické kontroly uvedené ve směrnici Evropského parlamentu a Rady 2014/45/EU (3), dílny uvedené v nařízení Evropského parlamentu a Rady (EU) č. 165/2014 (4) nebo jakékoli jiné dílny splňující požadavky v tomto nařízení. Členské státy, které se nerozhodnou pro zavedení palubních zařízení pro zjišťování hmotnosti na základě důvodů uvedených v čl. 10d odst. 1 směrnice 96/53/ES, by neměly mít povinnost tyto dílny zřizovat. |
|
(7) |
Současný stav technologií neumožňuje, aby byly do 27. května 2021 na palubní zařízení pro zjišťování hmotnosti uplatněny komunikační normy CEN DSRC ani C-ITS. Z tohoto důvodu by měla být palubní zařízení pro zjišťování hmotnosti zaváděna postupně, tak aby bylo možné vyvinout produkty, jež budou v souladu s požadavky tohoto nařízení, a zejména s požadavky v příloze II a některými požadavky v příloze III. Členské státy, které se rozhodnou pro instalaci palubních zařízení pro zjišťování hmotnosti ve vozidlech, by do 27. května 2021 měly uplatnit požadavky pro 1. fázi stanovené v přílohách I a III. Pro uplatnění požadavků stanovených v příloze II a požadavků pro 2. fázi stanovených v přílohách I a III by měla být poskytnuta dodatečná tříletá lhůta. |
|
(8) |
Členské státy mohou přijmout zvláštní opatření s cílem požadovat, aby vozidla zkontrolovaná příslušnými orgány za účelem zajištění souladu se směrnicí 96/53/ES, která byla uvedena do provozu ode dne 27. května 2021 a registrována na jejich území, byla vybavena palubním zařízením pro zjišťování hmotnosti. Nemělo by být povinné zpětně vybavovat takovým zařízením vozidla uvedená do provozu a registrovaná před tímto datem. |
|
(9) |
Opatření stanovená v tomto nařízení jsou v souladu se stanoviskem Výboru pro silniční dopravu uvedeného v článku 10i směrnice 96/53/ES, |
PŘIJALA TOTO NAŘÍZENÍ:
Článek 1
Oblast působnosti
1. Toto nařízení stanoví jednotné podmínky pro interoperabilitu a kompatibilitu palubních zařízení pro zjišťování hmotnosti instalovaných ve vozidlech nebo v soupravách vozidel pro účely zajištění souladu s čl. 10d odst. 4 až 5 směrnice Rady 96/53/ES nebo s požadavky na maximální hmotnost pro vnitrostátní dopravu členského státu, v němž se vozidlo používá.
2. Toto nařízení se nevztahuje na členské státy, které se nerozhodnou pro zavedení palubních zařízení pro zjišťování hmotnosti v souladu s čl. 10d odst. 1 směrnice 96/53/ES.
3. Členské státy mohou od povinnosti instalovat palubní zařízení pro zjišťování hmotnosti osvobodit vozidla nebo soupravy vozidel, u nichž vzhledem k jejich konstrukci nebo typu nákladu není možné překročit maximální povolenou hmotnost. Tyto výjimky se nesmí zakládat na maximální technicky přípustné hmotnosti naloženého vozidla uváděné výrobcem. Příslušné orgány mohou u vozidel nebo souprav vozidel, na která se vztahuje výjimka, přesto kontrolovat maximální povolenou hmotnost.
Článek 2
Definice
Použijí se tyto definice:
|
a) |
„palubním zařízením pro zjišťování hmotnosti“ (on-board weighing equipment, dále též „OBW“) se rozumí zařízení na palubě vozidla, které je schopno určit celkovou hmotnost nebo hmotnost na nápravu; |
|
b) |
„celkovou hmotností“ se rozumí celková hmotnost motorového vozidla a v případě soupravy vozidel celková hmotnost soupravy vozidel, kterou určí OBW, v kilogramech; |
|
c) |
„hmotností na nápravu“ nebo „zatížením na nápravu“ se rozumí hmotnost na zatíženou nápravu nebo skupinu náprav, kterou určí OBW, v kilogramech; |
|
d) |
„vypočtenou hmotností“ nebo „hodnotou hmotnosti“ se rozumí buď celková hmotnost, nebo hmotnost na nápravu v kilogramech; |
|
e) |
„celkem v motorovém vozidle“ (motor vehicle unit, dále též „MVU“) se rozumí část OBW umístěná v motorovém vozidle, bez senzorů, která je schopna shromažďovat, ukládat a zpracovávat údaje a vypočítat hodnotu hmotnosti na základě těchto údajů; |
|
f) |
„celkem v přívěsu“ (trailer unit, dále též „TU“) se rozumí část OBW umístěná v přívěsu nebo návěsu, bez senzorů, která je schopna shromažďovat, ukládat a zpracovávat údaje ze zařízení v přívěsu nebo návěsu a vypočítat hodnoty hmotnosti na nápravu na základě těchto údajů; |
|
g) |
„celkem ve vozidle pro vyhrazenou komunikaci krátkého dosahu“ (dedicated short-range communication vehicle unit, dále též „DSRC-VU“) se rozumí „zařízení pro včasné dálkové odhalování“ uvedené v dodatku 14 přílohy IC prováděcího nařízení Komise (EU) 2016/799 (5), které je schopno přijímat údaje OWS buď z MVU, nebo ze stanice C-ITS a posílat je do REDCR; |
|
h) |
„snímačem komunikace včasného dálkového odhalování“ (remote early detection communication reader, dále též „REDCR“) se rozumí snímač komunikace včasného dálkového odhalování v držení donucovacích orgánů, jenž je schopen číst údaje OWS, které přenáší DSRC-VU. REDCR může být totéž zařízení jako zařízení pro čtení dat RTM podle nařízení (EU) 2016/799, i když přenos dat RTM a údajů OWS se provádí na základě samostatných žádostí od REDCR; |
|
i) |
„údaji o hmotnosti“ se rozumí primární údaje přenášené mezi prvky OBW, které musí být zpracovány k získání vypočtené hmotnosti; |
|
j) |
„údaji palubního systému pro zjišťování hmotnosti“ (on-board weighing system data, dále též „údaje OWS“) se rozumí zabezpečené údaje v definovaném formátu, které REDCR požaduje po DSRC-VU; |
|
k) |
„senzorem“ se rozumí prvek palubního zařízení pro zjišťování hmotnosti, který je schopen generovat údaje o hmotnosti na základě měření konkrétních fyzikálních parametrů, přičemž tyto údaje využívá buď MVU, nebo TU k dalšímu zpracování; |
|
l) |
„stanicí kooperativních inteligentních dopravních systémů“ (cooperative intelligent transport systems station, dále též „stanicí C-ITS“) se rozumí stanice C-ITS ve smyslu aktu v přenesené pravomoci, kterým se doplňuje směrnice Evropského parlamentu a Rady 2010/40/EU, pokud jde o zavádění a provozní využití kooperativních inteligentních dopravních systémů, přijatého na základě čl. 6 odst. 1 uvedené směrnice; |
|
m) |
„fází přiřazení adresy“ se rozumí předběžná fáze elektronické komunikace mezi vozidly soupravy vozidel, při níž je každému vozidlu přiřazena pozice. |
|
n) |
„dílnou specializovanou na palubní zařízení pro zjišťování hmotnosti“ („dílnou specializovanou na OBW“) se rozumí dílna schválená členským státem k provádění kontrol palubního zařízení pro zjišťování hmotnosti. |
Článek 3
Certifikační politika
Členské státy zajistí, aby existoval nejméně jeden základní certifikační orgán, registrační orgán a schvalovací orgán, které jsou pro účely palubního zařízení pro zjišťování hmotnosti schopny plnit úkoly stanovené v certifikační politice pro zavádění a provoz evropských kooperativních inteligentních dopravních systémů (C-ITS), na něž se odkazuje v aktu v přenesené pravomoci, kterým se doplňuje směrnice Evropského parlamentu a Rady 2010/40/EU, pokud jde o zavádění a provozní využití kooperativních inteligentních dopravních systémů, přijatého na základě čl. 6 odst. 1 uvedené směrnice.
Článek 4
Pravidelné kontroly
1. Palubní zařízení pro zjišťování hmotnosti je každé dva roky po instalaci do vozidla nebo soupravy vozidel podrobeno pravidelné kontrole v dílně specializované na OBW.
2. Pravidelné kontroly se provádí v souladu s přílohou IV.
3. Cílem kontroly je zajistit soulad s těmito požadavky:
|
a) |
palubní zařízení pro zjišťování hmotnosti je namontováno v souladu s dokumentací poskytnutou výrobcem a je pro vozidlo vhodné; |
|
b) |
palubní zařízení pro zjišťování hmotnosti funguje správně a poskytuje přesné hodnoty hmotnosti; |
|
c) |
na palubním zařízení pro zjišťování hmotnosti nejsou připevněna žádná manipulační zařízení ani nenese po používání takových zařízení stopy. |
4. Na závěr kontroly vypracuje dílna specializovaná na OBW zprávu o kontrole palubního zařízení pro zjišťování hmotnosti. Kopie této zprávy musí zůstat uložena ve vozidle.
5. Zpráva o kontrole musí obsahovat alespoň tyto informace:
|
a) |
identifikační číslo vozidla (číslo VIN nebo číslo podvozku); |
|
b) |
datum a místo zkoušky; |
|
c) |
zkouška úspěšná (ano/ne); |
|
d) |
zjištěné nedostatky, včetně manipulace, a opatření přijatá k jejich nápravě; |
|
e) |
datum příští pravidelné kontroly nebo doba platnosti stávajícího osvědčení, není-li tato informace poskytnuta jiným způsobem; |
|
f) |
název, adresa a identifikační číslo dílny specializované na OBW a podpis nebo identifikace osoby odpovědné za kontrolu; |
|
g) |
značka, typ, identifikační číslo, číslo osvědčení typové zkoušky a datum nejnovějšího ověření certifikovaného zařízení pro zjišťování hmotnosti použitého pro pravidelnou kontrolu. |
6. Zprávy o kontrolách se uchovávají nejméně po dobu dvou let od vypracování, přičemž však členské státy mohou rozhodnout, že jsou tyto zprávy během uvedeného období zaslány příslušnému orgánu. Pokud jsou uchovávány v dílně specializované na OBW, zpřístupní tato dílna na žádost příslušného orgánu zprávy o kontrolách a kalibracích provedených v uvedeném období.
Článek 5
Dílny specializované na OBW
1. Členské státy schvalují, pravidelně auditují a certifikují dílny specializované na OBW, které mohou provádět kontroly palubního zařízení pro zjišťování hmotnosti.
2. Členské státy zajistí, aby dílny specializované na OBW, které se nacházejí na jejich území, prováděly kontroly palubních zařízení pro zjišťování hmotnosti spolehlivě. Za tímto účelem stanoví a zveřejní soubor postupů zajišťujících, že jsou splněna tato minimální kritéria:
|
a) |
zaměstnanci dílny specializované na OBW jsou řádně vyškoleni; |
|
b) |
vybavení nezbytné pro provádění příslušných zkoušek a úkolů je k dispozici a bylo certifikováno podle směrnice Evropského parlamentu a Rady 2014/31/EU (6) nebo směrnice Evropského parlamentu a Rady 2014/32/EU (7); |
|
c) |
dílny mají dobrou pověst. |
3. Dílny specializované na OBW jsou podrobovány těmto auditům:
|
a) |
nejméně každých pět let auditu prováděnému orgánem dozoru, který se týká postupů používaných při manipulaci s palubním zařízením pro zjišťování hmotnosti. Audit se zaměří na úkoly a činnosti stanovené v bodě 1 přílohy V směrnice 2014/45/EU; orgán dozoru musí splňovat požadavky stanovené v bodě 2 uvedené přílohy; |
|
b) |
rovněž mohou být prováděny neohlášené technické audity za účelem kontroly vybavení a prováděných kontrol, případně kalibrací. |
4. Členské státy přijmou vhodná opatření, aby zabránily střetu zájmů mezi dílnami specializovanými na OBW a dopravními podniky. Zejména v případech, kdy existuje vážné riziko střetu zájmů, například jsou-li dílny specializované na OBW ve vlastnictví dopravních podniků, je třeba přijmout další zvláštní opatření s cílem zajistit, aby byly tyto dílny v souladu s tímto článkem.
5. Příslušné orgány členských států zveřejní na svých internetových stránkách aktualizovaný seznam dílen specializovaných na OBW, který obsahuje alespoň tyto údaje:
|
a) |
identifikační číslo dílny a název [subjektu/subjektů tvořících] dílnu; |
|
b) |
poštovní adresu; |
|
c) |
e-mailovou adresu; |
|
d) |
telefonní číslo. |
6. Příslušné orgány členských států dočasně nebo trvale odejmou schválení dílnám specializovaným na OBW, které neplní své povinnosti vyplývající z tohoto nařízení.
Článek 6
Vstup v platnost a použitelnost
Toto nařízení vstupuje v platnost dvacátým dnem po vyhlášení v Úředním věstníku Evropské unie.
Toto nařízení se použije ode dne 27. května 2021.
Bod 1.4 písm. d) a body 5.3 a 8.1 přílohy I, příloha II a body 3, 8.2 a 10 přílohy III se však použijí ode dne 27. května 2024.
Toto nařízení je závazné v celém rozsahu a přímo použitelné ve všech členských státech.
V Bruselu dne 12. července 2019.
Za Komisi
předseda
Jean-Claude JUNCKER
(1) Směrnice Rady 96/53/ES ze dne 25. července 1996, kterou se pro určitá silniční vozidla provozovaná v rámci Společenství stanoví maximální přípustné rozměry pro vnitrostátní a mezinárodní provoz a maximální přípustné hmotnosti pro mezinárodní provoz (Úř. věst. L 235, 17.9.1996, s. 59).
(2) Směrnice Evropského parlamentu a Rady 2010/40/EU ze dne 7. července 2010 o rámci pro zavedení inteligentních dopravních systémů v oblasti silniční dopravy a pro rozhraní s jinými druhy dopravy (Úř. věst. L 207, 6.8.2010, s. 1).
(3) Směrnice Evropského parlamentu a Rady 2014/45/EU ze dne 3. dubna 2014 o pravidelných technických prohlídkách motorových vozidel a jejich přípojných vozidel a o zrušení směrnice 2009/40/ES (Úř. věst. L 127, 29.4.2014, s. 51).
(4) Nařízení Evropského parlamentu a Rady (EU) č. 165/2014 ze dne 4. února 2014 o tachografech v silniční dopravě, o zrušení nařízení Rady (EHS) č. 3821/85 o záznamovém zařízení v silniční dopravě a o změně nařízení Evropského parlamentu a Rady (ES) č. 561/2006 o harmonizaci některých předpisů v sociální oblasti týkajících se silniční dopravy (Úř. věst. L 60, 28.2.2014, s. 1).
(5) Prováděcí nařízení Komise (EU) 2016/799 ze dne 18. března 2016, kterým se provádí nařízení Evropského parlamentu a Rady (EU) č. 165/2014, kterým se stanoví požadavky na konstrukci, zkoušení, montáž, provoz a opravy tachografů a jejich součástí (Úř. věst. L 139, 26.5.2016, s. 1).
(6) Směrnice Evropského parlamentu a Rady 2014/31/EU ze dne 26. února 2014 o harmonizaci právních předpisů členských států týkajících se dodávání vah s neautomatickou činností na trh (Úř. věst. L 96, 29.3.2014, s. 107).
(7) Směrnice Evropského parlamentu a Rady 2014/32/EU ze dne 26. února 2014 o harmonizaci právních předpisů členských států týkajících se dodávání měřidel na trh (Úř. věst. L 96, 29.3.2014, s. 149).
PŘÍLOHA I
OBECNÁ USTANOVENÍ PRO PALUBNÍ ZAŘÍZENÍ PRO ZJIŠŤOVÁNÍ HMOTNOSTI (OBW)
1. Obecná ustanovení
1.1. Do oblasti působnosti tohoto nařízení jsou zahrnuty tyto typy systémů OBW:
|
a) |
dynamický systém: systém OBW, který určuje hmotnost tím, že shromažďuje a zpracovává informace o parametrech, které jsou získávány během jízdy vozidla, jako jsou zrychlení, trakce nebo brzdné síly, a ke kterým nedochází, když vozidlo stojí; |
|
b) |
statický systém: systém OBW, který určuje hmotnost prostřednictvím informací získaných z parametrů, které jsou získávány v době, kdy vozidlo stojí, jako je tlak vzduchu pod ním. |
1.2. Toto nařízení se provádí ve dvou fázích:
|
a) |
1. fáze OBW uvedená v bodě 5.2; |
|
b) |
2. fáze OBW uvedená v bodě 5.3. |
1.3. OBW vypočítá celkovou hmotnost a případně i hmotnost na nápravu.
1.4. OBW je tvořen těmito prvky:
|
a) |
celkem v motorovém vozidle (MVU) umístěným v motorovém vozidle; |
|
b) |
případně TU v přívěsu nebo návěsu; |
|
c) |
senzory; |
|
d) |
pro 2. fázi stanicí C-ITS v každém vozidle, v němž se nachází buď MVU, nebo TU. |
1.5. MVU a celek v přívěsu mohou každý obsahovat jednu procesorovou jednotku, nebo mohou být rozděleny na různé jednotky.
2. Celek v motorovém vozidle (MVU)
MVU:
|
a) |
přijímá zatížení nápravy z TU, je-li tento celek přítomen; |
|
b) |
shromažďuje údaje o hmotnosti od senzorů v motorovém vozidle; |
|
c) |
zpracovává dostupné informace a vypočítává odpovídající hodnoty hmotnosti. |
3. Celek v přívěsu (TU)
Je-li přítomen, TU:
|
a) |
shromažďuje údaje o hmotnosti od senzorů v přívěsu nebo návěsu, zpracovává dostupné informace a vypočítává hmotnosti na nápravy na základě těchto údajů; |
|
b) |
předává hodnoty hmotnosti na nápravy motorovému vozidlu. |
4. Výpočet hmotnosti
4.1. V případě dynamických systémů se první hodnota hmotnosti vypočítá nejpozději 15 minut poté, co se vozidlo začne pohybovat vpřed, a poté se přepočítává každých 10 minut nebo častěji.
4.2. V případě statických systémů se hodnoty hmotnosti vypočítávají každou minutu, když je zapnuto zapalování a vozidlo stojí.
4.3. Rozlišení vypočítané hmotnosti je 100 kg nebo vyšší.
5. Výměna informací mezi motorovým vozidlem a přívěsy nebo návěsy soupravy vozidel
5.1. Každý přívěs nebo návěs zpřístupní motorovému vozidlu hodnoty hmotnosti vypočítané přívěsem nebo návěsem v souladu s body 5.2 nebo 5.3, dle situace.
5.2. 1. fáze OBW
5.2.1. Každému přívěsu nebo návěsu je přiřazena pozice v soupravě vozidel v rámci dynamického přiřazení adresy podle normy ISO 11992–2:2014.
5.2.2. Po fázi přiřazení adresy předá TU každého přívěsu nebo návěsu MVU součet zatížení náprav nebo zatížení nápravy podle popisu uvedeného v bodech 6.5.4.7 a 6.5.5.42 normy ISO 11992–2:2014.
5.2.3. Zprávy o součtu zatížení náprav nebo zatížení nápravy se řídí specifikacemi normy ISO 11992–2:2014 pro zprávy typu EBS22 a RGE22.
5.2.4. Formát, směrování a obecné rozsahy parametrů zpráv musí být v souladu s body 6.1, 6.3 a 6.4 normy ISO 11992–2:2014.
5.3. 2. fáze OBW
Informace jsou mezi motorovým vozidlem a taženými přívěsy nebo návěsy vyměňovány prostřednictvím stanic C-ITS, jak je uvedeno v příloze II.
5.4. Pro 1. i 2. fázi OBW mohou být použity odlišené specifikace za předpokladu, že jsou s nimi kompatibilní zařízení OBW v motorovém vozidle a v přívěsech nebo návěsech.
6. Příprava údajů a přenos do DSRC-VU
MVU pro 1. fázi nebo stanice C-ITS v motorovém vozidle pro 2. fázi pošlou modulu DSRC-VU údaje z palubního systému pro zjišťování hmotnosti (OWS) v souladu s přílohou III.
Obrázek 1
Příklad uspořádání pro OBW v 1. fázi v případě soupravy vozidel v kombinaci nákladní vozidlo/návěs
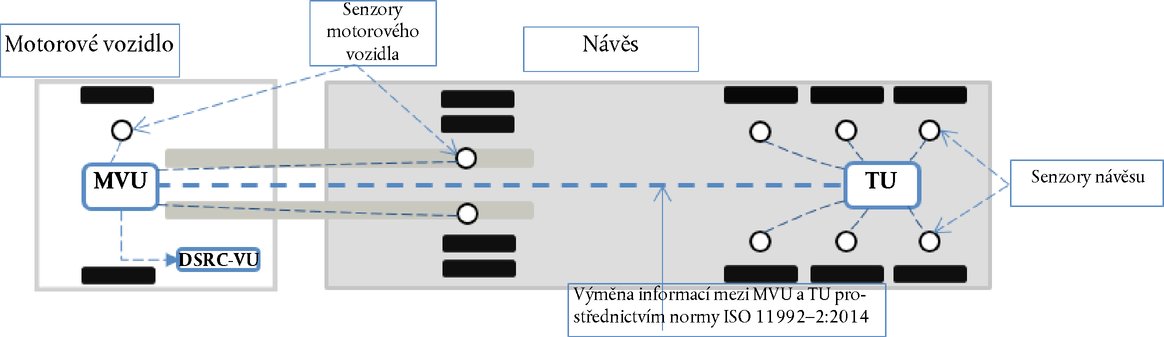
Motorové vozidlo
Výměna informací mezi MVU a TU pro-střednictvím normy ISO 11992–2:2014
Senzory motorového vozidla
TU
DSRC-VU
MVU
Senzory návěsu
Návěs
Obrázek 2
Příklad uspořádání pro OBW v 2. fázi v případě soupravy vozidel v kombinaci nákladní vozidlo/návěs
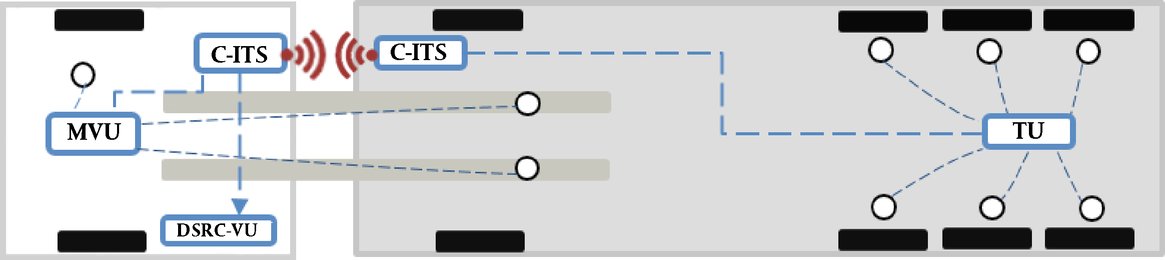
TU
C-ITS
C-ITS
DSRC-VU
MVU
7. Informace o hmotnosti pro řidiče
Řidič je informován zobrazením alespoň celkové hmotnosti.
8. Přesnost
8.1. Přesnost vypočítané hmotnosti je ± 5 % nebo vyšší, pokud je na vozidle náklad převyšující 90 % jeho maximální povolené hmotnosti.
8.2. Bez ohledu na bod 8.1 může být přesnost v 1. fázi OBW ± 10 % nebo vyšší.
PŘÍLOHA II
ZVLÁŠTNÍ USTANOVENÍ PRO 2. FÁZI OBW
1. Tato příloha se vztahuje výhradně na 2. fázi OBW.
2. Motorové vozidlo a přívěsy nebo návěsy soupravy vozidel s celkem v přívěsu (TU) musí být vybaveny stanicí C-ITS napojenou na celek v motorovém vozidle (MVU) nebo na TU příslušného vozidla. MVU a TU mohou být začleněny do svých příslušných stanic C-ITS.
3. MVU a TU posílají stanicím C-ITS, k nimž jsou připojeny, nezbytné informace pro přenos zpráv podle bodu 4.3 této přílohy.
Obrázek 3
Příklad toku zpráv ve 2. fázi OBW
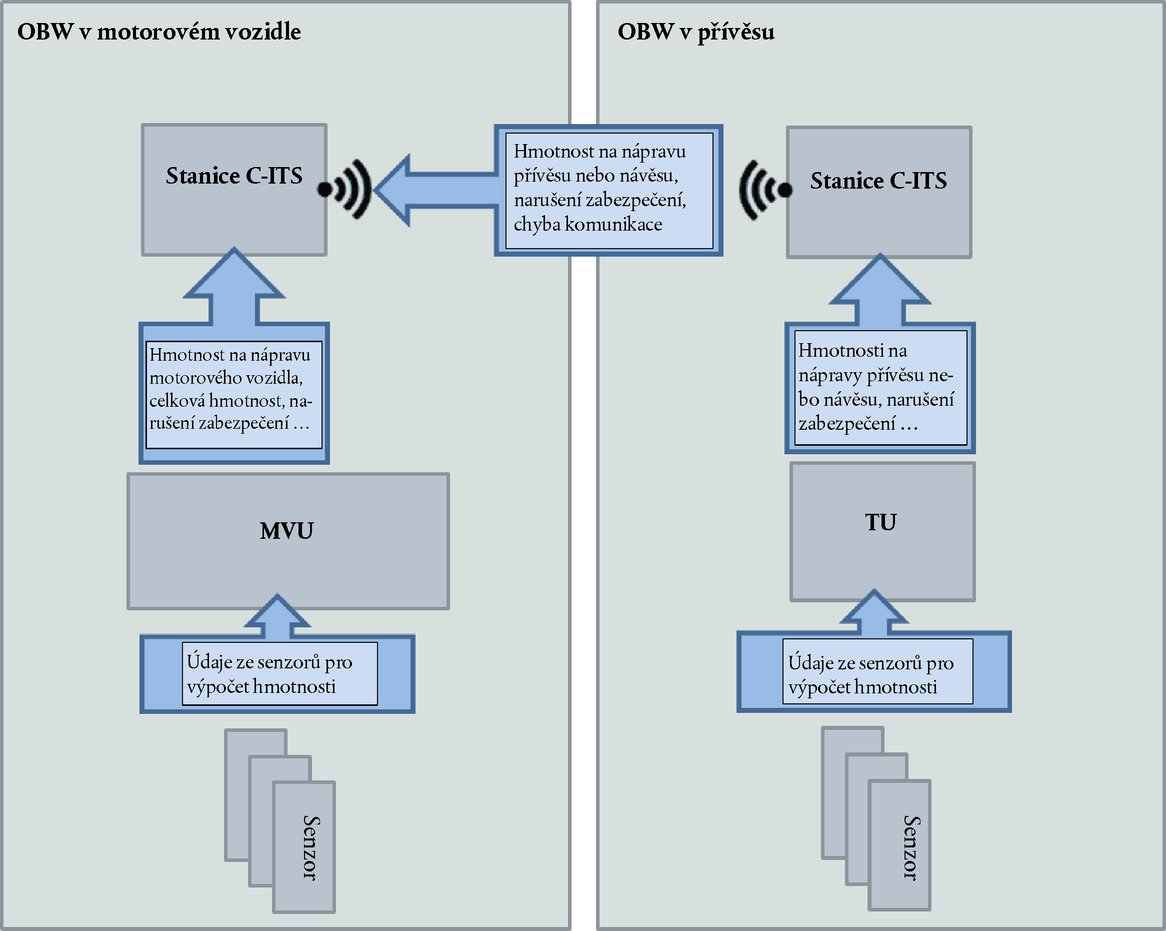
Údaje ze senzorů pro výpočet hmotnosti
Hmotnost na nápravu motorového vozidla, celková hmotnost, na-rušení zabezpečení …
Hmotnosti na nápravy přívěsu ne-bo návěsu, narušení zabezpečení …
Senzor
Senzor
Údaje ze senzorů pro výpočet hmotnosti
Stanice C-ITS
Hmotnost na nápravu přívěsu nebo návěsu, narušení zabezpečení, chyba komunikace
Stanice C-ITS
TU
MVU
OBW v přívěsu
OBW v motorovém vozidle
4. Výměna informací mezi motorovým vozidlem a přívěsem nebo návěsem
4.1. Informace o hmotnosti jsou mezi motorovým vozidlem a taženými přívěsy nebo návěsy vyměňovány prostřednictvím bezdrátového spojení vytvořeného mezi stanicemi C-ITS motorového vozidla a přívěsů nebo návěsů v souladu s normami EN 302 663-V1.1.1, s výjimkou bodu 4.2.1, EN 302 636-4-1-V1.3.1, EN 302 636-5.1-V2.1.1 a evropské normy o aplikaci OBW pro C-ITS, kterou vytvoří Evropský ústav pro telekomunikační normy (ETSI).
4.2. Zprávy vyměňované mezi stanicemi C-ITS musí být zabezpečeny v souladu s bodem 5.1.
4.3. Mezi stanicemi C-ITS se předávají tyto informace:
|
a) |
hmotnost na nápravu tažených přívěsů nebo návěsů; |
|
b) |
zprávy, které obsahují události typu „OBW communication error“ (chyba v komunikaci OBW): k události typu chyba v komunikaci OBW dojde v případě, že stanice C-ITS nenavážou vzájemnou zabezpečenou komunikaci v souladu s bodem 5.1 na více než tři pokusy; |
|
c) |
zprávy, které obsahují událost typu „security breach attempt“ (pokus o narušení zabezpečení): k události typu pokus o narušení zabezpečení dojde v případě, že OBW detekuje pokus o manipulaci s OBW, jak je stanoveno v bodě 5.2 a v dodatku. |
4.4. Formát zpráv potřebných pro fázi přiřazení adresy a pro předání informací uvedených v bodě 4.3 se stanoví na základě normy pro aplikaci OBW uvedené v bodě 4.1.
5. Bezpečnostní ustanovení
5.1. Zabezpečená komunikace mezi stanicemi C-ITS
5.1.1. Komunikace mezi stanicemi C-ITS musí být zabezpečena v souladu s evropskou normou ETSI TS 103 097-V1.3.1 a evropskou normou pro použití OBW pro C-ITS uvedenými v bodě 4.1.
5.1.2. V souladu s certifikační politikou pro zavádění a provoz evropských spolupracujících inteligentních dopravních systémů, kterou přijala Komise, musí stanice C-ITS splňovat tyto požadavky:
|
a) |
potvrzení o registraci od registračního úřadu, které slouží jako oprávnění, aby mohly být používány jako stanice C-ITS pro účely palubního zjišťování hmotnosti; |
|
b) |
určitý počet autorizačních lístků vydaných schvalovacím orgánem, které slouží jako oprávnění, aby mohly být používány v prostředí C-ITS jako součást OBW. |
5.2. Ochrana proti pokusům o narušení zabezpečení
Ochrana OBW ve 2. fázi proti pokusům o narušení zabezpečení musí být provedena v souladu s dodatkem k této příloze.
DODATEK K PŘÍLOZE II
OSVĚDČENÍ O BEZPEČNOSTI PRO 2. FÁZI OBW
1. MVU a TU musí mít osvědčení o bezpečnosti podle režimu všeobecných kritérií (Common Criteria). V tomto dodatku jsou MVU a TU dále označovány jako „OBW-VU“.
2. Minimální bezpečnostní požadavky, které musí OBW-VU splňovat, jsou definovány v bezpečnostním cíli (ST) podle režimu Common Criteria.
3. ST je navržen výrobcem zařízení, které má být certifikováno, a schválen vládním orgánem pro certifikaci bezpečnosti v oblasti informačních technologií vytvořeným v rámci společné interpretační pracovní skupiny, která podporuje vzájemné uznávání osvědčení v rámci evropské dohody o vzájemném uznávání osvědčení o posouzení bezpečnosti informačních technologií (SOGIS-MRA).
4. Brána V2X a hardwarový bezpečnostní modul stanic C-ITS musí mít osvědčení o zabezpečení vůči ochranným profilům brány V2X a hardwarovému bezpečnostního modulu vyvinutých konsorciem v oblasti komunikací Car2Car.
5. Stupeň záruky pro osvědčení o bezpečnosti OBW-VU je EAL2. Je-li však jako MVU používán tachograf, musí být certifikován vůči stupni záruky EAL4 rozšířeném o složky záruky ATE_DPT.2 a AVA_VAN.5, jak je stanoveno v dodatku 10 přílohy IC nařízení (EU) 2016/799.
6. Majetek chráněný ST
Chráněn je tento majetek:
|
a) |
Zpráva OBW-VU: veškeré zprávy odeslané nebo přijaté příslušným modulem OBW-VU, které přenášejí informace nezbytné pro výpočet hmotnosti. Příslušnými moduly OBW jsou hardwarové a softwarové jednotky OBW-VU, které zpracovávají informace, jež mohou v případě útoku vést k nesprávnému výpočtu celkové hmotnosti nebo hmotnosti na nápravu zařízením OBW. OBW-VU může být jeden příslušný modul nebo se skládat z různých příslušných modulů v souladu s bodem 1.5 přílohy I, přičemž v takovém případě je ST identifikuje. |
|
b) |
Zpráva o hmotnosti: zpráva obsahující celkovou hmotnost nebo hmotnost na nápravu vypočítanou zařízením OBW-VU. |
|
c) |
Kalibrační údaje: informace zadané do paměti OBW-VU pro kalibraci OBW. |
|
d) |
Informace o auditu: informace o pokusech o narušení zabezpečení odpovídající hrozbám, které jsou uvedeny v tomto dodatku. |
|
e) |
Software OBW-VU: software používaný v rámci OBW-VU pro používání a podporu funkcí OBW, které jsou relevantní pro výpočet hmotnosti a detekci pokusů o narušení zabezpečení. |
Obrázek 4
Příklady zpráv a zpráv o hmotnosti OBW-VU, které mají být chráněny v MVU skládajícím se ze dvou příslušných modulů
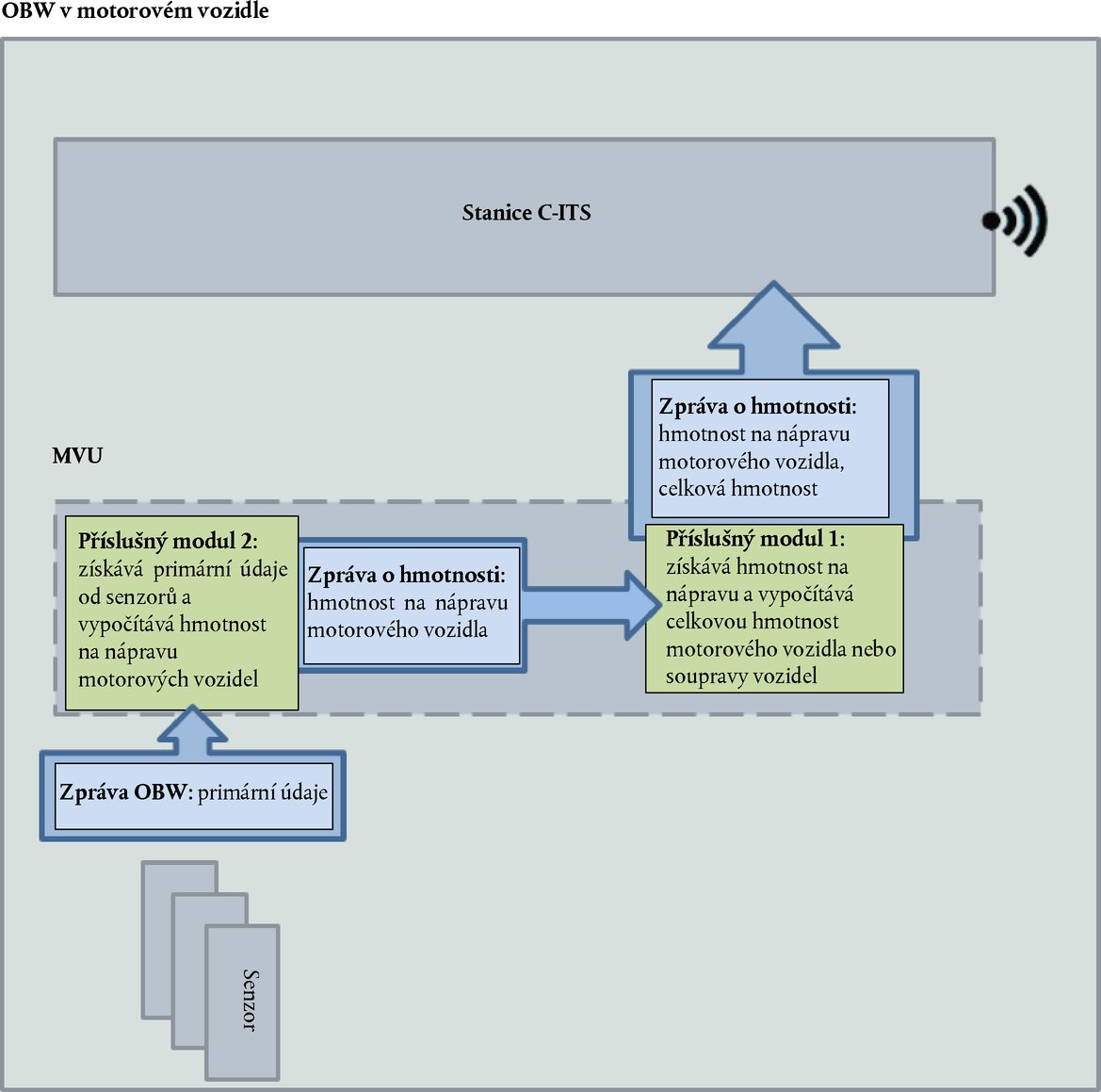
Zpráva OBW: primární údaje
Příslušný modul 1: získává hmotnost na nápravu a vypočítává celkovou hmotnost motorového vozidla nebo soupravy vozidel
Zpráva o hmotnosti: hmotnost na nápravu motorového vozidla, celková hmotnost
Zpráva o hmotnosti: hmotnost na nápravu motorového vozidla
MVU
Stanice C-ITS
Senzor
Příslušný modul 2: získává primární údaje od senzorů a vypočítává hmotnost na nápravu motorových vozidel
OBW v motorovém vozidle
7. Hrozby řešené v rámci ST
ST řeší tyto hrozby:
|
a) |
T.OBW-VU_message_spoof: útočník by mohl zfalšovat zprávy OBW-VU tak, aby OBW-VU vypočítal celkovou hmotnost nebo hmotnost na nápravu nesprávně. |
|
b) |
T.OBW-VU_message_tamper: útočník by mohl upravit zprávy OBW-VU tak, aby OBW-VU vypočítal celkovou hmotnosti nebo hmotnost na nápravu nesprávně. |
|
c) |
T.Weight_message_spoof: útočník by mohl zfalšovat zprávy o hmotnosti tak, aby se změnila hmotnost vypočítaná OBW-VU. |
|
d) |
T.Weight_message_tamper: útočník by mohl upravit zprávy o hmotnosti tak, aby se změnila hmotnost vypočítaná OBW-VU. |
|
e) |
T.Audit_spoof: útočník by mohl zfalšovat zprávy s informacemi o auditu. |
|
f) |
T.Audit_tamper: útočník by mohl upravit zprávy s informacemi o auditu. |
|
g) |
T.Calibration_tamper: útočník by mohl zadat nesprávné kalibrační údaje, aby přiměl OBW-VU vypočítat nesprávně hmotnost. |
|
h) |
T.Software_tamper: útočník by mohl upravit nebo nahradit software OBW-VU tak, aby se změnil běžný výpočet hmotnosti. |
|
i) |
T.Stored_Data_tamper: útočník by se mohl pokusit upravit nebo vymazat příslušné informace uložené v OBW-VU, včetně informací o auditu. |
8. Bezpečnostní cíle pro OBW-VU jsou následující:
|
a) |
O.Plausibility_validation: OBW-VU ověří, zda informace získané z příchozí zprávy do příslušného modulu, buď od senzorů, nebo od jiného modulu, lze považovat za důvěryhodné na základě jejich věrohodnosti. |
|
b) |
O.OBW-VU_stored_information_protection: OBW-VU musí být schopen chránit uložený software a údaje proti úpravám. |
|
c) |
O.Notification: OBW-VU musí být schopen oznámit pokus o narušení zabezpečení. |
9. Odůvodnění
|
a) |
T.OBW-VU_message_spoof je řešen O.Plausibility_validation a O.Notification. |
|
b) |
T.OBW-VU_message_tamper je řešen O.Plausibility_validation a O.Notification. |
|
c) |
T.Weight_message_spoof je řešen O.Plausibility_validation a O.Notification. |
|
d) |
T.Weight_message_tamper je řešen O.Plausibility_validation a O.Notification. |
|
e) |
T.Audit_spoof je řešen O.Plausibility_validation a O.Notification. |
|
f) |
T.Calibration_tamper je řešen O.Plausibility_validation a O.Notification. |
|
g) |
T.Software_tamper je řešen O.OBW-VU_stored_information_protection a O.Notification. |
|
h) |
T.Stored_data_tamper je řešen O.OBW-VU_stored_information_protection a O.Notification. |
Tabulka 1
Odůvodnění bezpečnostních cílů
|
|
O.Plausibility_validation |
O.OBW-VU_stored_information_protection |
O.Notification |
|
T.OBW_message_spoof |
X |
|
X |
|
T.OBW_message_tamper |
X |
|
X |
|
T.Weight_message_spoof |
X |
|
X |
|
T.Weight_message_tamper |
X |
|
X |
|
T.Audit_spoof |
X |
|
X |
|
T.Audit_tamper |
X |
|
X |
|
T.Calibration_tamper |
X |
|
X |
|
T.Software_tamper |
|
X |
X |
|
T.Stored_data_tamper |
|
X |
X |
PŘÍLOHA III
PŘÍPRAVA ÚDAJŮ A PŘENOS INFORMACÍ DO REDCR
1. Tato příloha, která doplňuje dodatek 14 přílohy IC nařízení (EU) 2016/799 (dále jen „dodatek 14“), upřesňuje požadavky na přípravu a přenos údajů OWS z motorového vozidla do snímače komunikace včasného dálkového odhalování (REDCR).
2. Přenos údajů z palubního systému pro zjišťování hmotnosti (OWS) pro 1. fázi OBW
2.1. Údaje OWS poskytuje celku v motorovém vozidle pro vyhrazenou komunikaci krátkého dosahu (DSRC-VU) celek v motorovém vozidle (MVU).
2.2. MVU:
|
2.2.1. |
vytvoří údaje OWS pomocí informací získaných z MVU a TU podle struktury uvedené v bodě 6; |
|
2.2.2. |
přepošle údaje OWS do DSRC-VU pro další přenos do REDCR. |
Obrázek 5
Přenos údajů OWS z MVU do REDCR pro 1. fázi OBW
Údaje OWS
DSRC-VU
Údaje OWS
MVU
REDCR
OBW v motorovém vozidle
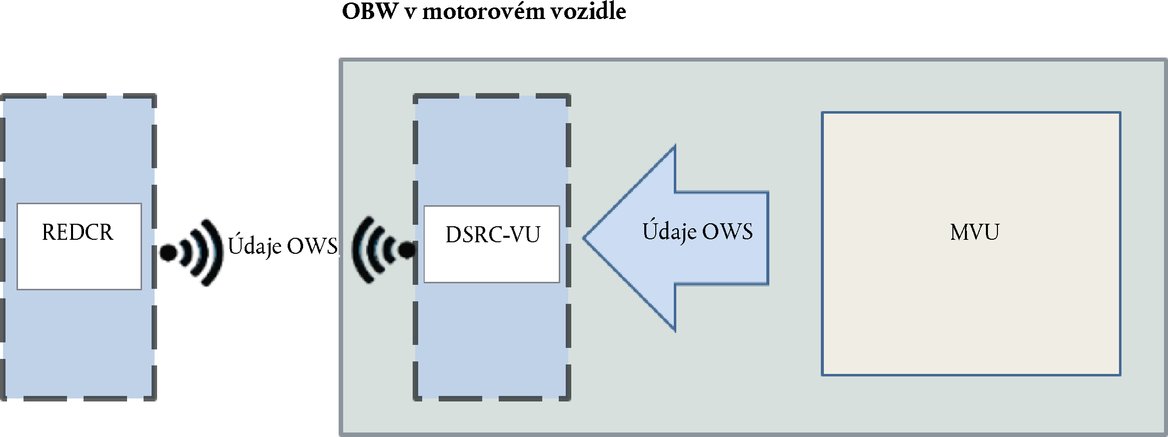
3. Přenos údajů OWS pro 2. fázi OBW
3.1. Údaje OWS jsou poskytovány DSRC-VU stanicí C-ITS v motorovém vozidle.
Obrázek č. 6
Přenos údajů OWS ze stanice C-ITS do REDCR pro 2. fázi OBW
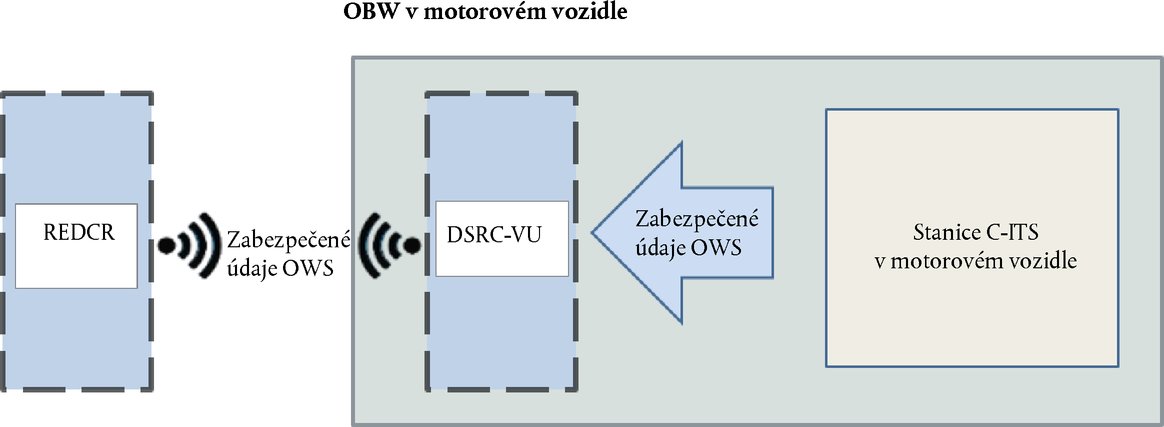
Zabezpečené údaje OWS
Zabezpečené údaje OWS
DSRC-VU
Stanice C-ITS v motorovém vozidle
REDCR
OBW v motorovém vozidle
3.2. Stanice C-ITS v motorovém vozidle:
|
3.2.1. |
vytvoří údaje OWS pomocí informací získaných od MVU a stanice C-ITS v tažených přívěsech nebo návěsech podle struktury uvedené v bodě 6; |
|
3.2.2. |
zabezpečí údaje OWS tak, jak je stanoveno v bodě 8 a |
|
3.2.3. |
přepošle údaje OWS do DSRC-VU pro další přenos do REDCR. |
4. Přenos údajů mezi DSRC-VU a buď MVU (1. fáze), nebo stanicí C-ITS v motorovém vozidle (2. fáze) musí být proveden tak, jak je stanoveno v bodě 5.6 dodatku 14, pokud je VU chápán buď jako MVU, nebo stanice C-ITS, v závislosti na dané fázi.
5. Komunikace mezi DSRC-VU a REDCR
5.1. Komunikace mezi DSRC-VU a REDCR se provádí přes rozhraní definované v normách CEN DSRC EN 12253, EN 12795, EN 12834, EN 13372 a ISO 14906, jak je uvedeno ve směrnici Rady 96/53/ES.
5.2. Transakční protokol pro stahování údajů OWS pomocí rozhraní 5.8 GHz DSRC je stejný jako protokol používaný pro údaje RTM v bodě 5.4.1 dodatku 14 s tím, že jediným rozdílem je, že identifikátor objektu, který se vztahuje k normě TARV, odpovídá normě ISO 15638 (TARV) části 20 týkající se WOB/OWS.
5.3. Příkazy používané pro transakci OWS jsou totožné s příkazy stanovenými v bodě 5.4.2 dodatku 14 pro transakci RTM.
5.4. Pořadí dotazovacích příkazů pro údaje OWS je totožné s pořadím stanoveným v bodě 5.4.3 dodatku 14 pro údaje RTM.
5.5. Mechanismus přenosu dat a popis transakce DSRC jsou totožné s mechanismem a popisem, které jsou stanoveny v bodech 5.4.6 a 5.4.7 dodatku 14. Servisní tabulka vozidla se však upraví pro přenos údajů OWS. Následně je Rtm-ContextMark nahrazena Ows-ContextMark, kterou identifikátor objektu odkáže na normu ISO 15638 (TARV) část 20 týkající se WOB/OWS.
5.6. Parametry fyzického rozhraní DSRC jsou totožné s parametry stanovenými v bodě 5.3 dodatku 14.
6. Struktura údajů
Definice modulu ASN.1 pro údaje DSRC v aplikaci OWS je určena takto:
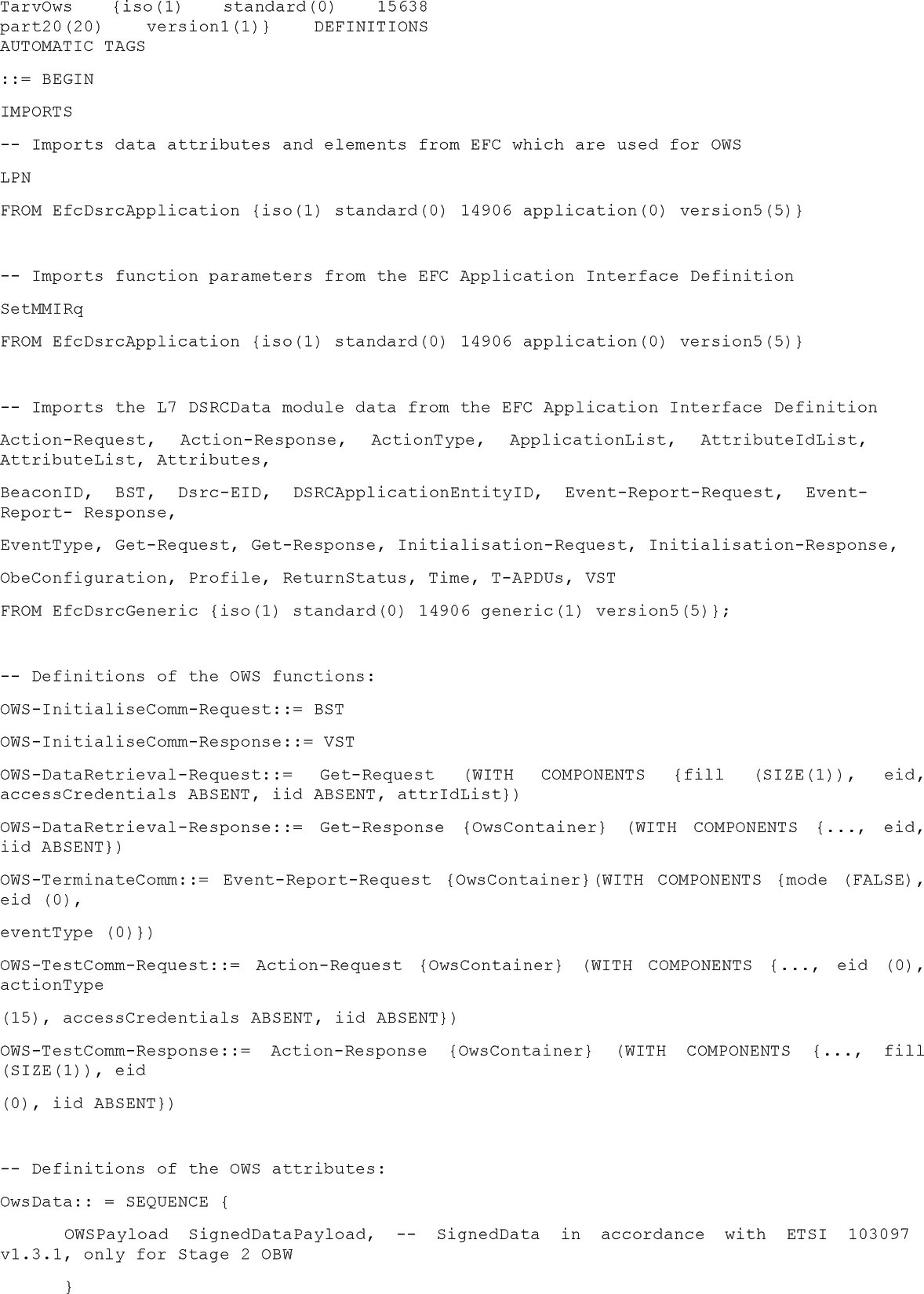
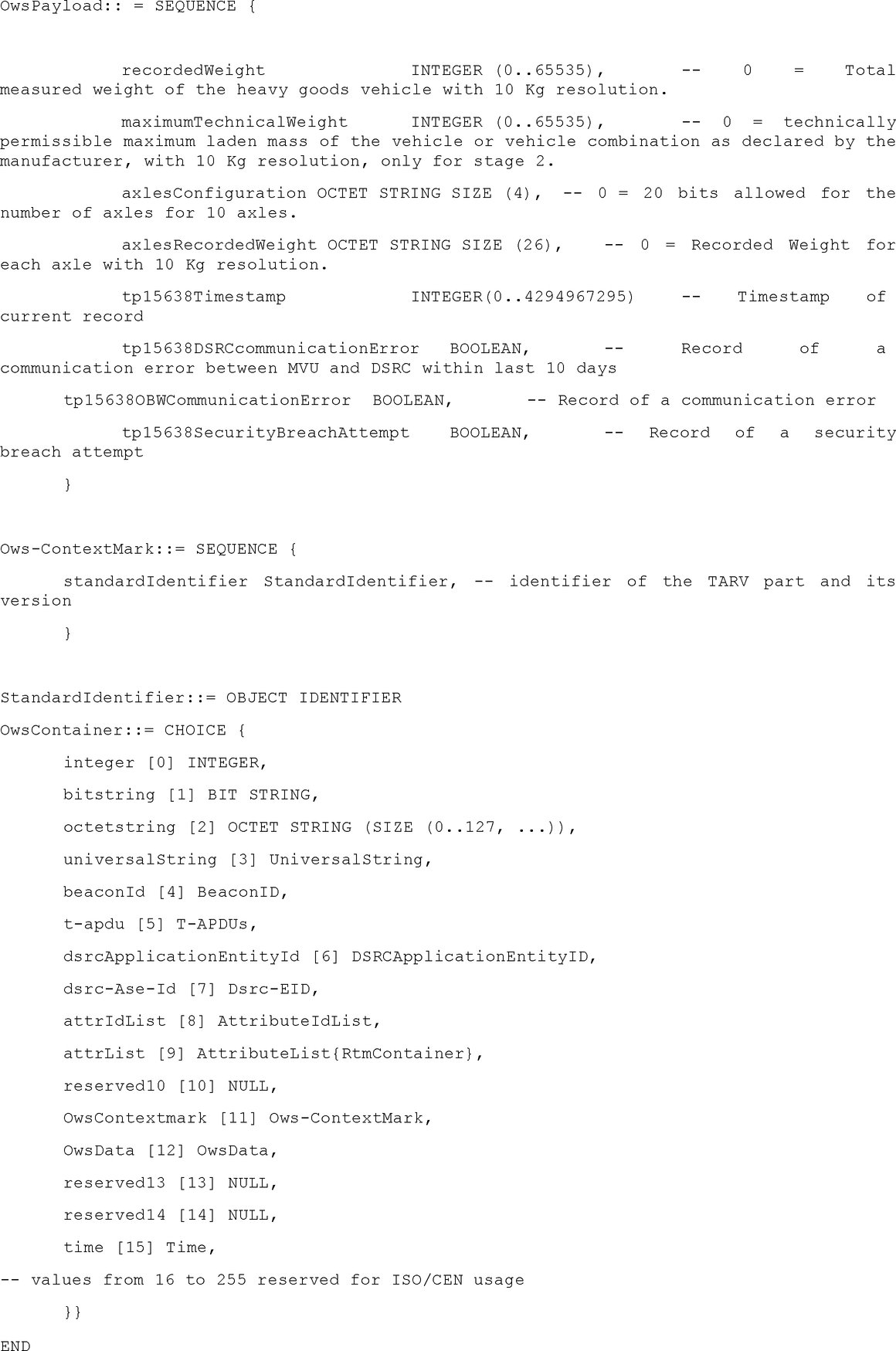
7. Prvky údajů OWS, provedené akce a definice:
Údaje OWS jsou vypočítávány buď MVU (1. fáze), nebo stanicí C-ITS v motorovém vozidle (2. fáze) podle tabulky 1.
Tabulka 1
Prvky údajů OWS, provedené akce a definice
|
Prvek OWSData |
Akce provedená stanicí C-ITS v motorovém vozidle |
Poznámka |
Definice údajů podle ASN.1 |
|
OWS1 Celková hmotnost |
Vygeneruje se celočíselná hodnota. |
Poslední naměřená celková hmotnost |
recordedWeight INTEGER (0..65535), |
|
OWS2 Maximální technicky přípustná hmotnost naloženého vozidla |
Vygeneruje se celočíselná hodnota. |
Maximální technicky přípustná hmotnost naloženého vozidla uváděná výrobcem |
maximumTechnicalWeight INTEGER (0..65535) |
|
OWS3 Konfigurace náprav vozidla |
Vygeneruje se oktetový řetězec velikosti 4. |
Konfigurace náprav |
axlesConfiguration OCTET STRING SIZE (4), |
|
OWS4 Hmotnost na nápravu |
Vygeneruje se oktetový řetězec velikosti 26. |
Hmotnost na nápravu |
axlesRecordedWeight OCTET STRING SIZE (26), |
|
OWS5 Celková hmotnost zaznamenaná v čase |
Vygeneruje se celočíselná hodnota. Hodnota OWS2 se stanoví k okamžiku aktuálního záznamu celkové hmotnosti. |
Časová značka aktuální zaznamenané hmotnosti |
tp15638Timestamp INTEGER (0..4294967295), |
|
OWS6 Chyba komunikace DSRC |
Vygeneruje se Booleova hodnota. Hodnota TRUE pro proměnnou tp15638DSRCcommunicationError bude přidělena, pokud se OBW v posledních 30 dnech setkal alespoň s jednou událostí typu Communication Error s DSRC-VU. V OSTATNÍCH PŘÍPADECH, pokud v posledních 30 dnech nedošlo k žádným událostem, bude přidělena hodnota FALSE. |
1 (TRUE) označuje chybu komunikace mezi OBW a DSRC-VU v posledních 30 dnech |
tp15638DSRCcommunicationError BOOLEAN, |
|
OWS7 Chyba komunikace OBW |
Vygeneruje se Booleova hodnota. Hodnota TRUE pro proměnnou tp15638CommunicationError bude přidělena, pokud se OBW v posledních 30 dnech setkal alespoň s jednou událostí typu chyba komunikace v OBW. V OSTATNÍCH PŘÍPADECH, pokud v posledních 30 dnech nedošlo k žádným událostem, bude přidělena hodnota FALSE. |
1 (TRUE) označuje chybu komunikace v OBW v posledních 30 dnech |
tp15638OBWCommunicationError BOOLEAN, |
|
OWS8 Pokus o narušení zabezpečení |
Vygeneruje se Booleova hodnota. Hodnota TRUE pro proměnnou tp15638SecurityBreachAttempt bude přidělena, pokud OBW v posledních 2 letech zaznamenal alespoň jednu událost typu pokus o narušení zabezpečení. V OSTATNÍCH PŘÍPADECH, pokud v posledních 2 letech nedošlo k žádným událostem typu pokus o narušení zabezpečení, bude přidělena hodnota FALSE. |
1 (TRUE) označuje pokus o narušení zabezpečení OBW v posledních 2 letech |
tp15638SecurityBreachAttempt BOOLEAN, |
kde:
|
a) |
recordedWeight znamená celkovou naměřenou hmotnost vozidla nebo soupravy vozidel s rozlišením 10 kg podle EN ISO 14906. Například hodnota 2 500 znamená celkovou hmotnost 25 tun. |
|
b) |
axlesConfiguration znamená konfiguraci vozidla nebo soupravy vozidel podle počtu náprav. Konfigurace je definována pomocí bitové masky 20 bitů (rozšíření z EN ISO 14906). Bitová maska 2 bitů znamená konfiguraci nápravy v následujícím formátu:
Posledních šest bitů je vyhrazeno pro budoucí použití. Tabulka 2 Distribuce bitů pro OWS2
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
c) |
axlesRecordedWeight znamená specifickou hmotnost zaznamenanou pro každou nápravu s rozlišením 10 kg. Pro každou nápravu se použijí dva oktety. Například hodnota 150 znamená hmotnost 1 500 kg. |
|
d) |
maximumTechnicalWeight znamená maximální technicky přípustnou hmotnost naloženého vozidla nebo soupravy vozidel uváděnou výrobcem. Tato hodnota se uvede pouze pro fázi 2. Pro fázi 1 se přidělí hodnota 0. |
8. Podpis údajů OWS
8.1. Pro 1. fázi se údaje OWS nepodepisují; otevřený text údajů OWS je poslán z MVU do DSRC-VU.
8.2. Pro 2. fázi jsou údaje OWS podepsány ve stanici C-ITS motorového vozidla a poslány ze stanice C-ITS do DSRC-VU v souladu s těmito ustanoveními:
|
8.2.1. |
Struktura zabezpečených údajů je vytvořena tak, jak je stanoveno v bodech 5.1 a 5.2 ETSI TS 103 097-V1.3.1. |
|
8.2.2. |
Typ SignedData uvedený v bodě 5.2 ETSI TS 103 097-V1.3.1 se řídí následujícími omezeními:
|
|
8.2.3. |
Definice modulu ASN.1 pro typ Signature je určena takto: 
|
|
8.2.4. |
Podpisový certifikát je osvědčení v autorizačním lístku, které stanice C-ITS používá pro transakci mezi stanicí C-ITS a REDCR, v souladu s bodem 6 ETSI TS 103 097-V1.3.1. |
|
8.2.5. |
Při přijímání zprávy REDCR ověří certifikát a použije veřejný klíč v tomto certifikátu ke čtení podpisu údajů OWS. |
9. Aplikační protokol a zpracování chyb pro údaje OWS jsou totožné s protokolem a zpracováním, které jsou uvedeny v bodech 5.6.2 a 5.7 dodatku 14.
10. Pro 2. fázi mohou být údaje OWS rovněž doručeny přímo REDCR příslušného orgánu prostřednictvím stanice C-ITS v motorovém vozidle namísto prostřednictvím DSRC-VU. V takovém případě je REDCR zároveň stanicí C-ITS.
PŘÍLOHA IV
PRAVIDELNÉ KONTROLY
1. Palubní zařízení pro zjišťování hmotnosti (OBW) musí být podrobována pravidelným kontrolám vážením vozidla nebo soupravy vozidel na certifikovaném vážicím zařízení v souladu s čl. 5 odst. 2 písm. b) tohoto nařízení, jako jsou přenosné váhy nebo mostové váhy.
2. Kontrole podléhají tato vozidla:
|
a) |
motorová vozidla; |
|
b) |
přívěsy a návěsy vybavené celkem v přívěsu (TU). |
3. Přívěsy a návěsy podléhající kontrole podle bodu 2 jsou kontrolovány v rámci kontroly daného motorového vozidla. Motorová vozidla určená k tažení návěsů jsou podrobena kontrole v rámci kontroly návěsu.
4. Pravidelná kontrola zahrnuje:
|
a) |
trojzátěžový test, který se provede dva roky po registraci vozidla a poté každé čtyři roky; |
|
b) |
jednozátěžový test, který se provede dva roky po prvním trojzátěžovém testu a poté každé čtyři roky. |
Tabulka 3
Pořadí provádění pravidelných kontrol
|
Test |
Trojzátěžový |
Jednozátěžový |
Trojzátěžový |
Jednozátěžový |
Trojzátěžový |
Jednozátěžový |
Trojzátěžový |
… |
|
Roky po dni registrace vozidla |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
… |
5. Trojzátěžový test
Trojzátěžový test se provádí naložením vozidla třemi různými zatíženími, přičemž jejich hodnoty se vypočítávají takto:
|
a) |
zatížení mezi 45 % a 55 % maximální technicky přípustné hmotnosti naloženého vozidla; |
|
b) |
zatížení mezi 65 % a 75 % maximální technicky přípustné hmotnosti naloženého vozidla; |
|
c) |
zatížení mezi 90 % a 100 % maximální technicky přípustné hmotnosti naloženého vozidla. |
6. Jednozátěžový test se provádí naložením vozidla zatížením, které představuje nejméně 90 % maximální technicky přípustné hmotnosti naloženého vozidla.
7. V případě přívěsů a návěsů vybavených TU a motorových vozidel určených k tažení návěsu se zatížení uvedená v bodech 5 a 6 vypočítají s ohledem na maximální technicky přípustnou hmotnost naložené soupravy vozidel.
8. Zvláštní ustanovení pro dynamické OBW
8.1. Překročí-li maximální technicky přípustná hmotnost naloženého vozidla nebo soupravy vozidel maximální povolenou hmotnost, vypočítají se zatížení uvedená v bodech 5 a 6 s ohledem na maximální povolenou hmotnost.
8.2. Pro získání hodnoty zatížení z OBW ujede vozidlo nebo souprava vozidel určitou vzdálenost za zvláštních podmínek, které jsou uvedeny v pokynech výrobce.
9. Kontrola se považuje za neúspěšnou, pokud:
|
a) |
hodnota zatížení zobrazená OBW, která odpovídá zatížení v rozmezí od 90 % do 100 % maximální technicky přípustné hmotnosti naloženého vozidla, uvedeného v bodě 5 písm. c), není v souladu s hodnotami naměřenými pomocí certifikovaného vážicího zařízení s přesností stanovenou v bodě 8 přílohy I, a |
|
b) |
hodnoty zatížení zobrazené OBW, které odpovídají zatížením v rozmezí od 45 % do 55 % a rozmezí od 65 % do 75 % maximální technicky přípustné hmotnosti naloženého vozidla, uvedeným v bodě 5 písm. a) a b), nejsou v souladu s hodnotami naměřenými pomocí certifikovaného vážicího zařízení s přesností ± 15 %. |
10. Je-li kontrola neúspěšná, musí být OBW nejpozději do dvou měsíců od předchozí kontroly podrobeno nové kontrole.
11. Flexibilita při pravidelných kontrolách:
S cílem usnadnit provádění pravidelných kontrol u určitých typů vozidel a snížit dopad pravidelných kontrol na pravidelné činnosti řidičů a dopravců mohou členské státy zvážit využití následujících flexibilních možností pro vozidla registrovaná na jejich území:
|
a) |
tři hodnoty zatížení uvedené v bodě 5 mohou být získány v průběhu tří měsíců; |
|
b) |
vlastní vážení vozidla může být provedeno na certifikovaných vážicích zařízeních, která nejsou součástí vybavení dílen specializovaných na OBW uvedených v článku 5 tohoto nařízení, za předpokladu, že vážení probíhá pod dohledem zaměstnance takové dílny. Vlastník vozidla předloží dílně specializované na OBW důkazy o tom, že vážení bylo provedeno na certifikovaném vážicím zařízení; |
|
c) |
u vozidel nebo souprav vozidel, jejichž konkrétní konfigurace technicky znemožňuje překročení maximální povolené hmotnosti při běžném použití (např. silniční cisterny), mohou mít zatížení uvedená v bodech 5 a 6 jiné hodnoty; v případě trojzátěžového testu musí být rozdíl mezi dvěma po sobě jdoucími zatíženími nejméně 15 % maximální povolené hmotnosti. |