(EU) 2016/646Nařízení Komise (EU) 2016/646 ze dne 20. dubna 2016, kterým se mění nařízení (ES) č. 692/2008 z hlediska emisí z lehkých osobních vozidel a z užitkových vozidel (Euro 6) (Text s významem pro EHP)
| Publikováno: | Úř. věst. L 109, 26.4.2016, s. 1-22 | Druh předpisu: | Nařízení |
| Přijato: | 20. dubna 2016 | Autor předpisu: | Evropská komise |
| Platnost od: | 16. května 2016 | Nabývá účinnosti: | 16. května 2016 |
| Platnost předpisu: | Zrušen předpisem (EU) 2017/1151 | Pozbývá platnosti: | 1. ledna 2022 |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
NAŘÍZENÍ KOMISE (EU) 2016/646
ze dne 20. dubna 2016,
kterým se mění nařízení (ES) č. 692/2008 z hlediska emisí z lehkých osobních vozidel a z užitkových vozidel (Euro 6)
(Text s významem pro EHP)
EVROPSKÁ KOMISE,
s ohledem na Smlouvu o fungování Evropské unie,
s ohledem na nařízení Evropského parlamentu a Rady (ES) č. 715/2007 ze dne 20. června 2007 o schvalování typu motorových vozidel z hlediska emisí z lehkých osobních vozidel a z užitkových vozidel (Euro 5 a Euro 6) a z hlediska přístupu k informacím o opravách a údržbě vozidla (1), a zejména na čl. 5 odst. 3 uvedeného nařízení,
vzhledem k těmto důvodům:
|
(1) |
Nařízení (ES) č. 715/2007 je jedním ze zvláštních regulačních aktů v rámci postupu schvalování typu stanoveného směrnicí Evropského parlamentu a Rady 2007/46/ES (2). |
|
(2) |
Nařízení (ES) č. 715/2007 vyžaduje, aby nová lehká užitková vozidla splňovala určité mezní hodnoty emisí, a stanoví dodatečné požadavky týkající se přístupu k informacím. Zvláštní technická ustanovení nezbytná k provedení uvedeného nařízení byla přijata nařízením Komise (ES) č. 692/2008 (3). |
|
(3) |
Komise na základě vlastního výzkumu a externích informací provedla podrobnou analýzu postupů, zkoušek a požadavků týkajících se schválení typu, které jsou stanoveny v nařízení (ES) č. 692/2008, a zjistila, že emise z vozidel Euro 5/6 při reálném provozu na silnici výrazně přesahují emise naměřené v regulačním novém evropském jízdním cyklu (NEDC), a to zejména pokud jde o emise NOx z naftových vozidel. |
|
(4) |
Zavedením a následnou revizí norem Euro byly postupně a výrazně zpřísněny požadavky na emise při schvalování typu motorových vozidel. Obecně se u vozidel dosáhlo podstatného snížení emisí celé řady regulovaných znečišťujících látek, neplatí to však pro emise NOx z naftových motorů, zejména lehkých užitkových vozidel. Proto je třeba provést kroky k nápravě této situace. |
|
(5) |
„Odpojovací zařízení“ podle definice v čl. 3 odst. 10 nařízení (ES) č. 715/2007, která snižují úroveň regulace emisí, jsou zakázána. Nedávné události poukázaly na to, že v této věci je třeba důslednějšího prosazování. Je proto namístě vyžadovat lepší dohled nad strategií pro regulaci emisí, kterou uplatňuje výrobce při schválení typu, a to na základě zásad, které se již vztahují na těžká nákladní vozidla podle nařízení Euro VI (ES) č. 595/2009 a jeho prováděcích opatření. |
|
(6) |
Řešení problému emisí NOx z naftových vozidel by mělo přispět ke snížení současných dlouhodobě vysokých úrovní koncentrací NO2 ve vnějším ovzduší, které jsou hlavním zdrojem obav týkajících se lidského zdraví. |
|
(7) |
Komise v lednu 2011 ustavila pracovní skupinu, do jejíž činnosti jsou zapojeny všechny zúčastněné strany a jejímž cílem je vyvinout zkušební postup pro emise v reálném provozu, který lépe odráží emise měřené na silnici. Za tímto účelem byla po zevrubných odborných diskusích zvolena varianta navržená v nařízení (ES) č. 715/2007, tedy využití přenosných systémů pro měření emisí (dále jen „PEMS“) a zavedení mezních hodnot, které nelze překročit. |
|
(8) |
Jak bylo se zúčastněnými stranami dohodnuto v rámci procesu CARS 2020 (4), měl by být zkušební postup pro emise v reálném provozu zaveden ve dvou fázích: během prvního přechodného období by se měly zkušební postupy uplatňovat pouze pro účely monitorování a následně by se měly uplatňovat společně se závaznými kvantitativními požadavky na emise v reálném provozu kladenými na všechna nová schválení typu a nová vozidla. |
|
(9) |
Zkušební postupy pro emise v reálném provozu byly zavedeny nařízením Komise (EU) 2016/427 (5). Aby se omezily emise z výfuku za všech běžných podmínek používání, je nyní nutno stanovit kvantitativní požadavky na emise v reálném provozu podle mezních hodnot emisí stanovených v nařízení (ES) č. 715/2007. Za tímto účelem by se měly zohlednit statistické a technické nejistoty v postupech měření. |
|
(10) |
Aby se mohli výrobci postupně přizpůsobit pravidlům pro emise v reálném provozu, měly by být konečné kvantitativní požadavky na emise v reálném provozu zavedeny ve dvou navazujících krocích. V prvním kroku, který by se měl začít uplatňovat 4 roky po uplynutí dat pro povinné uplatňování norem Euro 6, by se měl používat faktor shodnosti ve výši 2,1. Druhý krok by měl následovat 1 rok a 4 měsíce po kroku prvním a měl by vyžadovat dodržení mezní hodnoty 80 mg/km, která je pro emise NOx stanovena nařízením (ES) č. 715/2007, s tolerancí zohledňující dodatečné nejistoty měření v souvislosti s používáním PEMS. |
|
(11) |
Jakkoli je důležité, aby zkoušení emisí v reálném provozu potenciálně zahrnovalo všechny možné jízdní situace, je třeba zabránit tomu, aby byla zkoušená vozidla řízena úmyslně nesprávným způsobem, tj. se záměrem, aby vozidlo zkoušce vyhovělo či nevyhovělo nikoli na základě svých technických vlastností, nýbrž kvůli extrémnímu způsobu řízení. Aby k těmto situacím nedocházelo, zavádějí se pro zkoušení emisí v reálném provozu doplňkové mezní podmínky. |
|
(12) |
Jízdní podmínky při jednotlivých jízdách PEMS nemusí ze své podstaty zcela odpovídat „obvyklým podmínkám užívání vozidla“. Náročnost regulace emisí se proto může při těchto jízdách lišit. V důsledku toho a s cílem zohlednit statistické a technické nejistoty měřicích postupů se v budoucnu může uvažovat o tom, že se v mezních hodnotách, které nelze překročit a které se vztahují na jednotlivé jízdy PEMS, budou odrážet vlastnosti těchto jízd popsané pomocí určitých měřitelných parametrů, které by souvisely například s dynamikou řízení nebo pracovním zatížením. Pokud by se tato zásada uplatňovala, nemělo by to znamenat oslabení environmentálního dopadu a účinnosti zkušebních postupů pro emise v reálném provozu, což by se mělo prokazovat odborně recenzovanou vědeckou studií. Kromě toho by se při posuzování náročnosti regulace emisí během jízdy PEMS měly brát v úvahu pouze ty parametry, které lze obhájit objektivními vědeckými důvody, a nikoliv jen důvody souvisejícími s kalibrací motoru nebo zařízení k regulaci znečišťujících látek nebo systémů regulace emisí. |
|
(13) |
Dále vzhledem k tomu, že je zapotřebí regulovat emise NOx v městských podmínkách, je třeba se naléhavě soustředit i na změnu poměrné váhy prvků městského, silničního a dálničního provozu zkoušky emisí v reálném provozu, aby bylo zajištěno, že se v praxi podaří dosáhnout nízkého faktoru shodnosti, čímž by se v rámci třetího regulačního balíčku pro zkoušení emisí v reálném provozu vytvořila další mezní podmínka týkající se dynamiky řízení, při jejímž překročení se uplatní rozšířené podmínky počínaje daty zavedení kroku 1. |
|
(14) |
Komise bude ustanovení týkající se zkušebního postupu pro emise v reálném provozu průběžně přezkoumávat a upravovat tak, aby odpovídaly novým technologiím vozidel a byla zajištěna jejich účinnost. Obdobným způsobem bude Komise s ohledem na technický pokrok každoročně přezkoumávat příslušnou úroveň konečného faktoru shodnosti. S výhledem na vytvoření jednotné metody se bude zabývat zejména přezkumem dvou alternativních metod pro posuzování emisních údajů PEMS, které jsou uvedeny v dodatcích 5 a 6 k příloze IIIA nařízení (ES) č. 692/2008. |
|
(15) |
Nařízení (ES) č. 692/2008 by proto mělo být odpovídajícím způsobem změněno. |
|
(16) |
Opatření stanovená tímto nařízením jsou v souladu se stanoviskem Technického výboru – motorová vozidla, |
PŘIJALA TOTO NAŘÍZENÍ:
Článek 1
Nařízení (ES) č. 692/2008 se mění takto:
|
1) |
V článku 2 se doplňují nové body 43 a 44, které znějí:
|
|
2) |
V článku 3 odst. 10 se třetí pododstavec nahrazuje tímto: „Do tří let po datech uvedených v čl. 10 odst. 4 a do čtyř let po datech uvedených v čl. 10 odst. 5 nařízení (ES) č. 715/2007 se použijí tato ustanovení:“. |
|
3) |
Ustanovení čl. 3 odst. 10 písm. a) se nahrazuje tímto: „Požadavky bodu 2.1 přílohy IIIA se nepoužijí.“ |
|
4) |
V článku 5 se doplňují nové odstavce 11 a 12, které znějí:
|
|
5) |
Dodatek 6 k příloze I se mění způsobem stanoveným v příloze I tohoto nařízení. |
|
6) |
Příloha IIIA se mění způsobem stanoveným v příloze II tohoto nařízení. |
Článek 2
Toto nařízení vstupuje v platnost dvacátým dnem po vyhlášení v Úředním věstníku Evropské unie.
Toto nařízení je závazné v celém rozsahu a přímo použitelné ve všech členských státech.
V Bruselu dne 20. dubna 2016.
Za Komisi
předseda
Jean-Claude JUNCKER
(1) Úř. věst. L 171, 29.6.2007, s. 1.
(2) Směrnice Evropského parlamentu a Rady 2007/46/ES ze dne 5. září 2007, kterou se stanoví rámec pro schvalování motorových vozidel a jejich přípojných vozidel, jakož i systémů, konstrukčních částí a samostatných technických celků určených pro tato vozidla (rámcová směrnice) (Úř. věst. L 263, 9.10.2007, s. 1).
(3) Nařízení Komise (ES) č. 692/2008 ze dne 18. července 2008, kterým se provádí a mění nařízení Evropského parlamentu a Rady (ES) č. 715/2007 o schvalování typu motorových vozidel z hlediska emisí z lehkých osobních vozidel a z užitkových vozidel (Euro 5 a Euro 6) a z hlediska přístupu k informacím o opravách a údržbě vozidla (Úř. věst. L 199, 28.7.2008, s. 1).
(4) Sdělení Komise Evropskému parlamentu, Radě, Evropskému hospodářskému a sociálnímu výboru a Výboru regionů CARS 2020: Akční plán pro konkurenceschopný a udržitelný automobilový průmysl v Evropě (COM(2012) 636 final).
(5) Nařízení Komise (EU) 2016/427 ze dne 10. března 2016, kterým se mění nařízení (ES) č. 692/2008 z hlediska emisí z lehkých osobních vozidel a z užitkových vozidel (Úř. věst. L 82, 31.3.2016, s. 1).
PŘÍLOHA I
V dodatku 6 přílohy I nařízení (ES) č. 692/2008 se tabulka 1 mění takto:
|
1) |
Řádky ZD, ZE a ZF se nahrazují tímto:
|
|
2) |
Za řádek ZF se doplňují nové řádky, které znějí:
|
|
3) |
V legendě k tabulce se za odstavec týkající se emisní normy „Euro 6b“ vkládají nové odstavce, které znějí: „„Euro 6c“ emisní norma= požadavky na emise Euro 6 v plném rozsahu, avšak bez kvantitativních požadavků na emise v reálném provozu, tj. emisní norma Euro 6b, konečné normy týkající se počtu částic u vozidel se zážehovým motorem, používání referenčních paliv E10 a B7 (připadá-li v úvahu), posuzované pomocí regulatorního zkušebního cyklu v laboratoři a zkoušení emisí v reálném provozu pouze pro účely monitorování (nepoužijí se mezní hodnoty emisí, které nelze překročit); „Euro 6d-TEMP“ emisní norma= požadavky na emise Euro 6 v plném rozsahu, tj. emisní norma Euro 6b, konečné normy týkající se počtu částic u vozidel se zážehovým motorem, používání referenčních paliv E10 a B7 (připadá-li v úvahu), posuzované pomocí regulatorního zkušebního cyklu v laboratoři a zkoušení emisí v reálném provozu, zda splňují přechodné faktory shodnosti;“. |
|
4) |
V legendě k tabulce se odstavec týkající se emisní normy „Euro 6c“ nahrazuje tímto zněním: „„Euro 6d“ emisní norma= požadavky na emise Euro 6 v plném rozsahu, tj. emisní norma Euro 6b, konečné normy týkající se počtu částic u vozidel se zážehovým motorem, používání referenčních paliv E10 a B7 (připadá-li v úvahu), posuzované pomocí regulatorního zkušebního cyklu v laboratoři a zkoušení emisí v reálném provozu, zda splňují konečné faktory shodnosti;“. |
PŘÍLOHA II
Příloha IIIA nařízení (ES) č. 692/2008 se mění takto:
|
1) |
bod 2.1 se nahrazuje tímto: „2.1 Mezní hodnoty, které nelze překročit Po celou běžnou dobu životnosti vozidla, jehož typ byl schválen podle nařízení (ES) č. 715/2007, nesmí být emise stanovené podle požadavků této přílohy a vypuštěné při jakékoliv možné zkoušce emisí v reálném provozu, jež byla provedena v souladu s požadavky této přílohy, vyšší než tyto mezní hodnoty, které nelze překročit (NTE): NTEpollutant = CFpollutant × TF(p1,…, pn) × EURO-6, kde EURO-6 je platná mezní hodnota emisí podle normy Euro 6 stanovená v tabulce 2 přílohy I nařízení (ES) č. 715/2007.“ |
|
2) |
Vkládají se nové body 2.1.1, 2.1.2 a 2.1.3, které znějí: „2.1.1 Konečné faktory shodnosti Faktor shodnosti CFpollutant pro příslušnou znečišťující látku je specifikován takto:
tolerance je parametr zohledňující dodatečné nejistoty měření, které s sebou nese zařízení PEMS a které podléhají každoročnímu přezkumu a budou se revidovat v návaznosti na vylepšení kvality postupu PEMS nebo technický pokrok. 2.1.2 Přechodné faktory shodnosti Odchylně od ustanovení bodu 2.1.1 se mohou po dobu pěti let a čtyř měsíců od uplynutí dat stanovených v čl. 10 odst. 4 a 5 nařízení (ES) č. 715/2007 a na žádost výrobce použít tyto přechodné faktory shodnosti:
Použití přechodných faktorů shodnosti se zaznamená do prohlášení o shodě vozidla. 2.1.3 Přenosové funkce Přenosová funkce TF(p1,…, pn) uvedená v bodě 2.1 má hodnotu 1 pro kompletní škálu parametrů pi (i = 1,…,n). Je-li třeba přenosovou funkci TF(p1,…, pn) změnit, musí být změna provedena tak, aby nebyla na úkor environmentálního dopadu a účinnosti zkušebních postupů pro emise v reálném provozu. Zejména musí stále platit tato podmínka: ∫ TF (p1,…, pn) * Q (p1,…, pn) dp = ∫ Q (p1,…, pn) dp kde:
|
|
3) |
Vkládá se nový bod 3.1.0, který zní:
|
|
4) |
Bod 5.3 se zrušuje; |
|
5) |
Bod 5.4 se nahrazuje tímto: „5.4 Dynamické podmínky Dynamické podmínky zahrnují vliv sklonu vozovky, čelního větru a dynamiky jízdy (zrychlování, zpomalování) a pomocných systémů na spotřebu energie a emise zkušebního vozidla. Ověření normálnosti dynamických podmínek se provádí po dokončení zkoušky pomocí údajů zaznamenaných systémem PEMS. Ověření se provede ve dvou krocích:
|
|
6) |
Bod 6.8 se nahrazuje tímto:
|
|
7) |
V bodě 6.11 se doplňuje se nová věta, která zní: „Kromě toho musí být poměrný kumulativní pozitivní nárůst nadmořské výšky menší než 1 200 m/100 km a musí být stanoven v souladu s dodatkem 7b.“ |
|
8) |
Bod 9.5 se nahrazuje tímto:
|
|
9) |
Dodatek 1 se mění takto:
|
|
10) |
Poznámka pod čarou č. 2 k tabulce 4 bodu 8 dodatku 2 se nahrazuje tímto:
|
|
11) |
V bodě 2 dodatku 6 se zrušuje následující definice:
|
 , [m/s
, [m/s|
12) |
V bodě 2 dodatku 6 se vkládají tyto nové definice:
|

|
13) |
V bodě 3.1 dodatku 6 se první odstavec nahrazuje tímto zněním: „Skutečný výkon na kolech Pr,i je celkový výkon potřebný k překonání odporu vzduchu, valivého odporu, sklonu vozovky, podélné setrvačnosti vozidla a rotační setrvačnosti kol.“ |
|
14) |
V dodatku 6 se bod 3.2 nahrazuje tímto zněním: „3.2 Klasifikace klouzavých průměrů pro úseky ve městě, mimo město a na dálnici Standardní frekvence výkonu jsou definovány pro jízdu ve městě a pro celou jízdu (viz odstavec 3.4) a musí se provést samostatné hodnocení emisí pro celou jízdu a pro jízdu ve městě. Třísekundové klouzavé průměry vypočtené podle odstavce 3.3 se proto následně musí přidělit podmínkám jízdy ve městě a mimo město podle signálu rychlosti (vi) ze skutečné sekundy i, jak je uvedeno v tabulce 1-1. Tabulka 1-1 Rychlostní pásma pro účely přidělování zkušebních údajů k podmínkám jízdy ve městě, mimo město a na dálnici v rámci metody diskretizace výkonu
|
|
15) |
V dodatku 6 se bod 3.9 nahrazuje tímto zněním: „3.9 Výpočet vážené hodnoty emisí závislé na vzdálenosti Časově vyjádřené vážené průměry emisí vzešlé ze zkoušky se přepočítají na emise vyjádřené podle vzdálenosti, a to jedenkrát pro soubor údajů týkající se jízdy ve městě a jedenkrát pro celkový soubor údajů tímto způsobem:
Pomocí těchto vzorců se pro celou jízdu a pro jízdu ve městě vypočítají vážené průměry pro tyto znečišťující látky:
|


|
16) |
Doplňují se nové dodatky 7a a 7b, které znějí: „Dodatek 7a Ověření celkové dynamiky jízdy 1. ÚVOD Tento dodatek popisuje výpočetní postupy pro účely ověření celkové dynamiky jízdy a určení celkového přebytku nebo nedostatku dynamiky při jízdě ve městě, mimo město a na dálnici. 2. SYMBOLY RPA relativní pozitivní zrychlení „rozlišení zrychlení ares “ minimální zrychlení > 0 měřené v m/s2 Metoda T4253H pro vyhlazování složených dat „pozitivní zrychlení apos “ zrychlení [m/s2] větší než 0,1 m/s2 Index (i) se týká časového kroku Index (j) se týká časového kroku datových souborů pozitivního zrychlení Index (k) se týká kategorie (t = celková, u = město, r = mimo město, m = dálnice)
3. INDIKÁTORY TÝKAJÍCÍ SE JÍZDY 3.1 Výpočty 3.1.1 Přípravné zpracování údajů Dynamické parametry, jako je zrychlení, v · apos nebo RPA, se při rychlosti vyšší než 3 km/h určí pomocí signálu rychlosti s přesností 0,1 % a frekvence odběrů 1 Hz. Tento požadavek na přesnost v zásadě splňují signály (rotační) rychlosti kola vozidla. U křivky rychlosti se musí ověřit, zda nevykazuje nesprávné nebo nepravděpodobné úseky. Pro křivku rychlosti vozidla v takových úsecích jsou charakteristické kroky, skoky, schodky v křivce rychlosti nebo chybějící hodnoty. Krátké chybné úseky se musí opravit, například interpolací údajů nebo porovnáním údajů se sekundárním signálem rychlosti. Případně lze krátké jízdy obsahující chybné úseky vyřadit z následné analýzy údajů. V druhém kroku se hodnoty zrychlení seřadí vzestupně, aby se mohlo stanovit rozlišení zrychlení ares = (minimální hodnota zrychlení > 0). Jestliže je ares ≤ 0,01 m/s 2, měření rychlosti vozidla je dostatečně přesné. Jestliže je 0,01 < ares ≤ rmax m/s2, provede se vyhlazení použitím Hanningova filtru T4253. Jestliže je ares > rmax m/s2, jízda je neplatná. Hanningův filtr T4253 provádí tyto výpočty: vyhlazování začíná s průběžným mediánem 4, který je vystředěn průběžným mediánem 2. Následně se tyto hodnoty znovu vyhladí použitím průběžného mediánu 5, průběžného mediánu 3 a Hannovy funkce (průběžné vážené průměry). Rezidua se vypočítají tak, že se od původních řad odečtou řady vyhlazené. Celý postup se poté zopakuje na vypočtených reziduích. Na závěr se vyhlazená rezidua přepočítají tak, že se odečtou vyhlazené hodnoty, které byly tímto postupem získány prve. Správný průběh křivky rychlosti je základem pro další výpočty a diskretizaci, jak je popsáno v odstavci 3.1.2. 3.1.2 Výpočet vzdálenosti, zrychlení a v · a Níže uvedené výpočty se musí provádět po celý průběh křivky rychlosti v závislosti na čase (rozlišení 1 Hz) od sekundy 1 do sekundy tt (poslední sekunda). Nárůst vzdálenosti na vzorek údajů se vypočte takto: di = vi /3,6, i = 1 to Nt kde:
Zrychlení se vypočte takto: ai = (v i + 1 – v i – 1)/(2 · 3,6), i = 1 to Nt kde: ai je zrychlení v časovém kroku i [m/s2] Pro i = 1: i = 0, pro i = Nt : vi + 1 = 0. Součin rychlosti vozidla na zrychlení se vypočte takto: (v · a)i = vi · ai /3,6, i = 1 to Nt kde: (v · a)i je součin skutečné rychlosti vozidla na zrychlení v časovém kroku i [m2/s3 nebo W/kg]. 3.1.3 Diskretizace výsledků Po vypočtení ai a (v · a)i se hodnoty vi , di , ai a (v · a)i seřadí vzestupně podle rychlosti vozidla. Veškeré datové soubory s vi ≤ 60 km/h patří do „městského“ rychlostního koše, veškeré datové soubory s 60 km/h < vi ≤ 90 km/h patří do „silničního“ rychlostního koše a veškeré datové soubory s vi > 90 km/h km/h patří do „dálničního“ rychlostního koše. Počet datových souborů s hodnotami zrychlení ai > 0,1 m/s2 musí být v každém rychlostním koši větší nebo roven 150. U každého rychlostního koše se průměrná rychlost vozidla
kde: Nk je celkový počet vzorků podílů ve městě, mimo město a na dálnici. 3.1.4. Výpočet v · apos_[95] na rychlostní koš 95. percentil hodnot v · apos se vypočte takto: Hodnoty v · a) i,k v každém rychlostním koši se seřadí vzestupně u všech souborů údajů s ai,k ≥ 0,1 m/s2 a stanoví se celkový počet těchto Mk vzorků. Hodnoty percentilu se poté přiřadí k hodnotám (v · apos ) j,k s ai,k ≥ 0,1 m/s2 takto: Nejnižší hodnotě v · apos se přiřadí percentil 1/Mk , druhé nejnižší hodnotě se přiřadí 2/Mk , třetí nejnižší se přiřadí 3/Mk a nejvyšší hodnotě se přiřadí Mk /Mk = 100 %. (v · apos ) k _[95] je hodnota (v · apos ) j,k , s j/Mk = 95 %. Nelze-li j/Mk = 95 % vyhovět, (v · apos ) k _[95] se vypočte lineární interpolací po sobě následujících vzorků j a j + 1 s j/Mk < 95 % a (j + 1)/Mk > 95 %. Relativní pozitivní zrychlení pro každý rychlostní koš se vypočítá takto: RPAk = Σ j (Δt · (v · apos ) j,k )/Σ idi,k , j = 1 to Mk,i = 1 to Nk,k = u,r,m kde: RPAk je relativní pozitivní zrychlení pro podíly ve městě, mimo město a na dálnici v [m/s2 nebo kWs/(kg*km)]
4. OVĚŘENÍ PLATNOSTI JÍZDY 4.1.1 Ověření v*apos_[95] na rychlostní interval (přičemž v je uvedeno v [km/h]) Pokud a
je splněno, jízda je neplatná. Jestliže je 4.1.2 Ověření RPA na rychlostní interval Jestliže je Jestliže je Dodatek 7b Postup pro stanovení kumulativního pozitivního nárůstu nadmořské výšky při jízdě 1. ÚVOD Tento dodatek popisuje postup pro stanovení kumulativního nárůstu nadmořské výšky během jízdy pro zkoušení emisí v reálném provozu. 2. SYMBOLY
3. OBECNÉ POŽADAVKY Při stanovení kumulativního pozitivního nárůstu nadmořské výšky během jízdy pro zkoušení emisí v reálném provozu se vychází ze tří parametrů: okamžitá nadmořská výška vozidla hGPS,i [m nad hladinou moře] naměřená GPS, okamžitá rychlost vozidla v i [km/h] zaznamenaná při frekvenci 1 Hz a odpovídající čas t [s], který uplynul od začátku zkoušky. 4. VÝPOČET KUMULATIVNÍHO POZITIVNÍHO NÁRŮSTU NADMOŘSKÉ VÝŠKY 4.1 Obecné informace Výpočet kumulativního pozitivního nárůstu nadmořské výšky během jízdy pro zkoušení emisí v reálném provozu se provede třístupňovým postupem, který sestává z i) kontroly a důsledného ověření kvality údajů, ii) korekce údajů o okamžité nadmořské výšce vozidla, a iii) výpočtu kumulativního pozitivního nárůstu nadmořské výšky. 4.2 Kontrola a důsledné ověření kvality údajů Ověří se, zda jsou údaje o okamžité rychlosti vozidla úplné. Korekce kvůli chybějícím údajům je přípustná, splňují-li chybějící údaje požadavky stanovené v bodě 7 dodatku 4; v opačném případě se výsledky zkoušek považují za neplatné. Ověří se, zda jsou údaje o okamžité nadmořské výšce úplné. Chybějící údaje se doplní interpolací. Správnost interpolovaných údajů se ověří pomocí topografické mapy. Doporučuje se provést korekci interpolovaných údajů, pokud platí tyto podmínky: |hGPS(t) – hmap(t)| > 40 m Provede se korekce nadmořské výšky, aby platilo: h(t) = hmap(t) kde:
4.3 Korekce údajů o okamžité nadmořské výšce vozidla Nadmořská výška h(0) na začátku jízdy při d(0) se získá pomocí GPS a správnost se ověří pomocí informací z topografické mapy. Odchylka nesmí být větší než 40 m. Musí se provést korekce veškerých údajů o okamžité nadmořské výšce h(t), pokud platí tato podmínka: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) Provede se korekce nadmořské výšky, aby platilo: hcorr(t) = hcorr (t-1) kde:
Po dokončení postupu pro korekci nadmořské výšky se stanoví platný soubor údajů o nadmořské výšce. Tento soubor se použije ke konečnému výpočtu kumulativního pozitivního nárůstu nadmořské výšky, jak je popsáno v bodě 4.4. 4.4 Konečný výpočet kumulativního pozitivního nárůstu nadmořské výšky 4.4.1 Stanovení jednotného prostorového rozlišení Celková vzdálenost dtot [m] ujetá při jízdě se určí jako součet okamžitých vzdáleností d i. Okamžitá vzdálenost d i se určí jako:
kde:
Kumulativní nárůst nadmořské výšky se vypočte z údajů o konstantním prostorovém rozlišení 1 m, počínaje prvním měřením na začátku jízdy d(0). Samostatné datové body s rozlišením 1 m se označují jako trasové body a vyznačují se specifickou hodnotou vzdálenosti d (např. 0, 1, 2, 3 m…) a jí odpovídající nadmořskou výškou h(d) [m nad hladinou moře]. Nadmořská výška každého samostatného trasového bodu d se vypočte interpolací okamžité nadmořské výšky hcorr(t) jako:
kde:
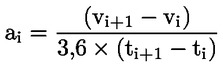
4.4.2 Dodatečné vyhlazení údajů Údaje o nadmořské výšce získané pro každý samostatný trasový bod se vyhladí pomocí dvoufázového postupu; d a a d e označují první, resp. poslední datový bod (obrázek 1). První vyhlazení se provede takto:
h int,sm,1(d) = h int,sm,1(d – 1 m) + road grade,1(d), d = da + 1 to de h int,sm,1(da ) = hint (da ) + road grade,1(da ) kde:
Druhé vyhlazení se provede takto:
kde:
Obrázek 1 Příklad postupu pro vyhlazení interpolovaných signálů nadmořské výšky 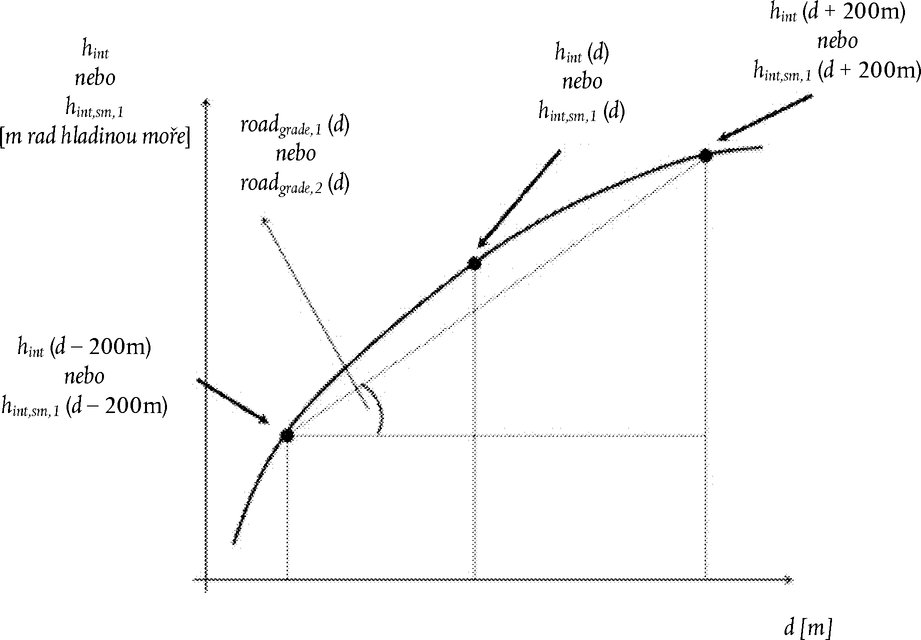
4.4.3 Výpočet konečného výsledku Kumulativní pozitivní nárůst nadmořské výšky během jízdy se vypočte integrací všech pozitivních interpolovaných a vyhlazených sklonů vozovky, tj. roadgrade,2(d). Výsledek by se měl normalizovat celkovou vzdáleností ujetou při zkoušce d tot a vyjádřit v metrech kumulativního nárůstu nadmořské výšky na sto kilometrů vzdálenosti. 5. ČÍSELNÝ PŘÍKLAD V tabulkách 1 a 2 jsou uvedeny kroky pro výpočet pozitivního nárůstu nadmořské výšky na základě údajů zaznamenaných během silniční zkoušky s PEMS. Pro zestručnění je uvedena pouze pasáž 800 m a 160 s. 5.1 Kontrola a důsledné ověření kvality údajů Kontrola a důsledné ověření kvality údajů sestává ze dvou kroků. Nejprve se zkontroluje úplnost údajů o rychlosti vozidla. V daném vzorku údajů nebyly zjištěny žádné chybějící údaje týkající se rychlosti vozidla (viz tabulka 1). V druhém kroku se zkontroluje úplnost údajů o nadmořské výšce; v daném vzorku údajů chybí údaje o nadmořské výšce týkající se sekund 2 a 3. Chybějící údaje se vyplní interpolací signálu GPS. Kromě toho se nadmořská výška udaná GPS ověří podle topografické mapy; ověření zahrnuje i nadmořskou výšku h(0) na začátku jízdy. Pomocí topografické mapy byla provedena korekce údajů o nadmořské výšce týkajících se sekund 112–114, aby byla splněna tato podmínka: hGPS(t) – hmap(t) < – 40 m V důsledku uplatněného ověření údajů byly získány údaje v pátém sloupci h(t). 5.2 Korekce údajů o okamžité nadmořské výšce vozidla Jako další krok se údaje o nadmořské výšce h(t) pro sekundy 1 až 4, 111 až 112 a 159 až 160 zkorigují, přičemž se předpokládají hodnoty nadmořské výšky pro sekundy 0, 110, resp. 158, neboť platí tato podmínka: |h(t) – h(t – 1)| > (v(t)/3,6 * sin45°) V důsledku uplatněné korekce údajů byly získány údaje v šestém sloupci hcorr(t). Vliv provedených ověřovacích a korekčních kroků na údaje o nadmořské výšce je znázorněn na obrázku 2. 5.3 Výpočet kumulativního pozitivního nárůstu nadmořské výšky 5.3.1 Stanovení jednotného prostorového rozlišení Okamžitá vzdálenost di se vypočítá tak, že se okamžitá rychlost vozidla změřená v km/h vydělí hodnotou 3,6 (sloupec 7 v tabulce 1). Přepočítáním údajů o nadmořské výšce pro účely jednotného prostorového rozlišení 1 m se získají samostatné trasové body d (sloupec 1 v tabulce 2) a jim odpovídající hodnoty nadmořské výšky hint(d) (sloupec 7 v tabulce 2). Nadmořská výška každého samostatného trasového bodu d se vypočte interpolací naměřené okamžité nadmořské výšky hcorr(t):
5.3.2 Dodatečné vyhlazení údajů První a poslední samostatné trasové body v tabulce 2 jsou: d a = 0 m, resp. d e = 799 m. Údaje o nadmořské výšce každého samostatného trasového bodu se vyhladí pomocí dvoufázového postupu. První vyhlazení sestává z:
zvoleno ke znázornění vyhlazení pro d ≤ 200 m
zvoleno ke znázornění vyhlazení pro 200 m < d < (599 m)
zvoleno ke znázornění vyhlazení pro d ≥ (599 m) Vyhlazená a interpolovaná nadmořská výška se vypočte takto: h int,sm,1(0) = hint (0) + road grade,1(0) = 120,3 + 0,0033 ≈ 120,3033 m h int,sm,1(799) = h int,sm,1(798) + road grade,1(799) = 121,2550 – 0,0220 = 121,2330 m Druhé vyhlazení:
zvoleno ke znázornění vyhlazení pro d ≤ 200 m
zvoleno ke znázornění vyhlazení pro 200 m < d < (599)
zvoleno ke znázornění vyhlazení pro d ≥ (599 m) 5.3.3 Výpočet konečného výsledku Kumulativní pozitivní nárůst nadmořské výšky během jízdy se vypočte integrací všech pozitivních interpolovaných a vyhlazených sklonů vozovky, tj. roadgrade,2(d). Ve znázorněném příkladu byla celková ujetá vzdálenost dtot = 139,7 km a všechny pozitivní interpolované a vyhlazené sklony vozovky činily 516 m. Kumulativní pozitivní nárůst nadmořské výšky tudíž činil 516 × 100/139,7 = 370 m/100 km. Tabulka 1 Korekce údajů o okamžité nadmořské výšce vozidla
Tabulka 2 Výpočet sklonu vozovky
Obrázek 2 Účinek ověření a korekce údajů – profil nadmořské výšky změřený GPS hGPS(t), profil nadmořské výšky podle topografické mapy hmap(t), profil nadmořské výšky získaný po kontrole a důsledném ověření kvality údajů h(t) a korekce hcorr(t) údajů uvedených v tabulce 1 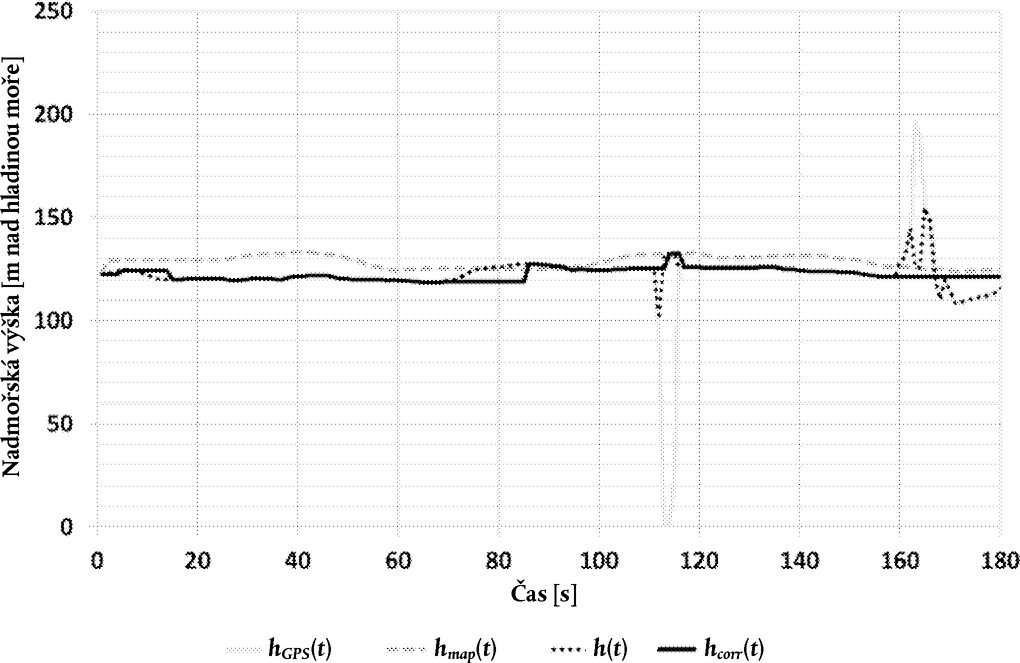
Obrázek 3 Srovnání mezi korigovaným profilem nadmořské výšky hcorr(t) a vyhlazenou a interpolovanou nadmořskou výškou hint,sm,1 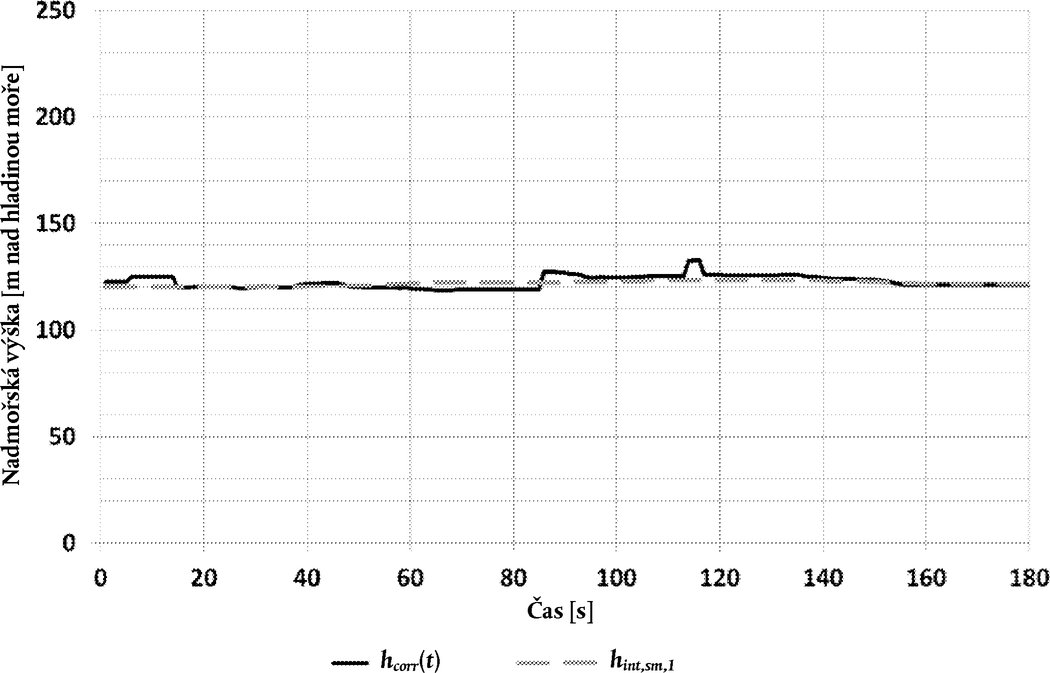
Tabulka 2 Výpočet pozitivního nárůstu nadmořské výšky
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 vypočítá takto:
vypočítá takto: ,
, 

 a
a  splněno, jízda je neplatná.
splněno, jízda je neplatná. a
a  splněno, jízda je neplatná.
splněno, jízda je neplatná. a RPA
a RPA















(1) Emise CO se změří a zaznamenají při zkouškách emisí v reálném provozu.
(2) Emise CO se změří a zaznamenají při zkouškách emisí v reálném provozu.