OSN č. 151Předpis OSN č. 151 – Jednotná ustanovení pro schvalování motorových vozidel z hlediska informačního systému pro eliminaci mrtvého úhlu určeného k detekci jízdních kol [2020/1596]
| Publikováno: | Úř. věst. L 360, 30.10.2020, s. 48-65 | Druh předpisu: | Nařízení |
| Přijato: | 30. října 2020 | Autor předpisu: | Evropská komise |
| Platnost od: | 25. září 2020 | Nabývá účinnosti: | 25. září 2020 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
|
30.10.2020 |
CS |
Úřední věstník Evropské unie |
L 360/48 |
Pouze původní texty EHK OSN mají podle mezinárodního veřejného práva právní účinek. Je zapotřebí ověřit si status a datum vstupu tohoto předpisu v platnost v nejnovější verzi dokumentu EHK OSN o statusu TRANS/WP.29/343/, který je k dispozici na internetové adrese: http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Předpis OSN č. 151 – Jednotná ustanovení pro schvalování motorových vozidel z hlediska informačního systému pro eliminaci mrtvého úhlu určeného k detekci jízdních kol [2020/1596]
Zahrnuje veškerá platná znění až po:
Doplněk 1 k původnímu znění předpisu – datum vstupu v platnost: 25. září 2020
Tento dokument slouží výhradně jako dokumentační nástroj. Rozhodná a právně závazná znění jsou: ECE/TRANS/WP.29/2019/28 a
ECE/TRANS/WP.29/2020/18
OBSAH
PŘEDPIS
|
0. |
Úvod (pro informaci) |
|
1. |
Oblast působnosti |
|
2. |
Definice |
|
3. |
Žádost o schválení |
|
4. |
Schválení |
|
5. |
Specifikace |
|
6. |
Zkušební postup |
|
7. |
Změna typu vozidla a rozšíření schválení |
|
8. |
Shodnost výroby |
|
9. |
Postihy za neshodnost výroby |
|
10. |
Definitivní ukončení výroby |
|
11. |
Názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek a názvy a adresy schvalovacích orgánů |
PŘÍLOHY
|
1 |
Sdělení |
|
2 |
Uspořádání značek schválení typu |
|
3 |
Postup stanovení požadavků na výkonnost pro zkušební případy odlišné od těch, které jsou uvedeny v tabulce zkušebních případů |
0. ÚVOD (pro informaci)
|
0.1 |
Srážky nákladních vozidel s cyklisty, ke kterým obvykle dochází v situacích, kdy nákladní vozidlo odbočuje doprava, a to při nižších rychlostech jízdy nebo když vozidlo stojí, mají pro zranitelné účastníky silničního provozu obvykle vážné následky. Bezpečnost zranitelných účastníků silničního provozu již dříve zvýšilo zlepšení rozhledu řidičů nákladních vozidel, kterého přineslo zvýšení počtu zrcátek a vybavení nákladních vozidel boční ochranou proti podjetí. Vzhledem k tomu, že k nehodám při odbočování nadále dochází a že v mnoha kategoriích vozidel byly zavedeny asistenční systémy pro řidiče, nabízí se využití těchto asistenčních systémů k předcházení nehodám mezi odbočujícími nákladními vozidly a cyklisty. |
|
0.2 |
Z teoretických úvah vyplývá, že kritičnost dopravních situací, ve kterých figurují těžká vozidla a jízdní kola, může být kvůli špatnému pochopení situace řidiči těchto vozidel vysoká. V některých případech se může situace vyvinout tak náhle, že výstražný signál vysoké intenzity, který má vyvolat reakci řidiče na situaci v přiměřené reakční době, nemůže být spuštěn dostatečně včas. Obecně lze konstatovat, že reakce řidiče na jakoukoli informaci (vysokoprahová nebo nízkoprahová výstraha nebo informace) lze očekávat až po uplynutí reakční doby. Tato doba je v mnoha případech výrazně delší než doba potřebná k tomu, aby se předešlo nehodě – nehodě tak navzdory výstraze nelze zabránit. |
|
0.3 |
Výstražné signály vysoké intenzity během řízení jsou opodstatněné, pouze pokud je pravděpodobnost nehody vysoká, jinak řidiči vozidla výstrahy systému obvykle ignorují. Informační asistenční systém (nízkoprahový) však může být aktivován dostatečně včas, protože řidiči spíše pomáhá, než aby jej obtěžoval. Předpokládá se, že je možné navrhnout rozhraní člověk-stroj pro asistenční systémy pro eliminaci mrtvého úhlu tak, aby řidiče neobtěžovalo, pokud informace není potřebná, například tím, že se signál umístí mimo střed zorného pole řidiče při pohledu dopředu, avšak v místě, kde je viditelné, je-li pohled řidiče stočen mírně v plánovaném směru jízdy. Vhodné umístění, které tyto požadavky splňuje, se nachází přibližně v úhlu 40° směrem doprava od osy, která je paralelní ke střednici vozidla a prochází okem řidiče. |
|
0.4 |
Předpis OSN proto požaduje včasnou aktivaci informačního signálu v případě možného vjetí jízdního kola do kritické oblasti na straně spolujezdce, pokud by těžké vozidlo začalo zatáčet směrem k tomuto jízdnímu kolu, včetně situací, kdy by k otočení bylo nutné natočení opačným směrem (tzn. směrem od jízdního kola). Tento asistenční informační signál se deaktivuje pouze automaticky v případě poruchy systému nebo znečištění senzorů, není možné jej deaktivovat manuálně. |
|
0.5 |
Předpis OSN navíc požaduje odlišný signál, který musí být vydán, pokud se srážka stane nevyhnutelnou, tzn. pokud je zaznamenáno otočení volantu nebo použití ukazatelů změny směru. Tento dodatečný výstražný signál může být deaktivován manuálně nebo automaticky, v případě poruchy nebo kontaminace senzorů musí být deaktivován zároveň s informačním signálem. |
|
0.6 |
Předpis OSN definuje zkušební postup, který nevyžaduje skutečné otáčecí manévry. Toto je přijatelné, neboť informační signál musí být v každém případě podán dostatečně včas. Z experimentálních údajů vyplývá, že u těžkých vozidel některé otáčecí manévry, zejména při odbočování do úzké ulice, vyžadují předchozí natočení opačným směrem, které začíná přibližně 15 m před vjezdem do takové ulice. Z tohoto důvodu zkušební postup uvedený v tomto předpisu vyžaduje, aby byl informační signál aktivován 15 m před předpokládaným bodem srážky. |
|
0.7 |
Tento předpis umožňuje technickým zkušebnám provádět zkoušky jiných, více či méně náhodných kombinací parametrů, které nejsou uvedeny v tabulce 1 v dodatku 1. Předpokládá se, že systémy budou spolehlivější, ale tím se zkomplikuje i zkušební postup:
Aby bylo možné odpovídajícím způsobem analyzovat, zda systém vyhovuje nebo nevyhovuje požadavkům bodu 5, je připojena příloha 3 pro výpočet hodnot vyhovění a nevyhovění. Mohly by se však vyskytnout protichůdné požadavky v případech, kdy v jednom zkušebním případě informační signál není přípustný, avšak v jiném případě s identickými relativními polohami jízdního kola a vozidla, ale odlišnými poloměry zatáčení a místy nárazu (které nejsou pro systém v daných informačních bodech zjistitelné), je vyžadován. Hodnocení kritéria „první informační bod“ se proto u těchto druhů zkoušek neprovádí; kritérium se považuje za splněné, pokud je úspěšně splněna zkouška na falešné podání signálu (při míjení dopravní značky). |
1. OBLAST PŮSOBNOSTI
|
1.1 |
Tento předpis se vztahuje na informační systém pro eliminaci mrtvého úhlu u vozidel kategorie N2 (s maximální technicky přípustnou hmotností vozidla > 8 tun) a N3. Vozidla kategorií N2 (s maximální technicky přípustnou hmotností vozidla ≤ 8 tun), M2 a M3 mohou být schválena na základě požadavku výrobce. |
|
1.2 |
Požadavky tohoto předpisu jsou formulovány pro vozidla konstruovaná pro pravostranný provoz. U vozidel konstruovaných pro levostranný provoz se tyto požadavky použijí s obrácenými kritérii, kde je to relevantní. |
2. DEFINICE
Pro účely tohoto předpisu se rozumí:
|
2.1 |
„schválením typu vozidla“ úplný postup, jímž smluvní strana dohody potvrzuje, že typ vozidla splňuje technické požadavky tohoto předpisu; |
|
2.2 |
„typem vozidla, pokud jde o jeho informační systém pro eliminaci mrtvého úhlu“ kategorie vozidel, která se vzájemně neliší v takových zásadních hlediscích, jako jsou:
|
|
2.3 |
„informačním systémem pro eliminaci mrtvého úhlu (dále též „systém ISMU“)“ systém, který informuje řidiče o možné srážce s jízdním kolem nacházejícím se blízko boku vozidla; |
|
2.4 |
„reakční dobou“ doba mezi informačním signálem a reakcí řidiče; |
|
2.5 |
„referenčním zorným bodem“ střed mezi dvěma body vzdálenými od sebe 65 mm a umístěnými 635 mm svisle nad referenčním bodem na sedadle řidiče, který je specifikován v příloze 1 dokumentu ECE/TRANS/WP.29/78/Rev.6 (1). Přímka spojující oba tyto body je kolmá ke střední podélné svislé rovině vozidla. Střed úsečky spojující oba body leží v podélné svislé rovině, která prochází středem určeného místa sezení řidiče podle údajů výrobce vozidla; |
|
2.6 |
„brzdnou drahou“ vzdálenost, kterou vozidlo potřebuje k úplnému zastavení od informačního signálu systému pro eliminaci mrtvého úhlu, s přihlédnutím k reakční době a brzdnému zpomalení; |
|
2.7 |
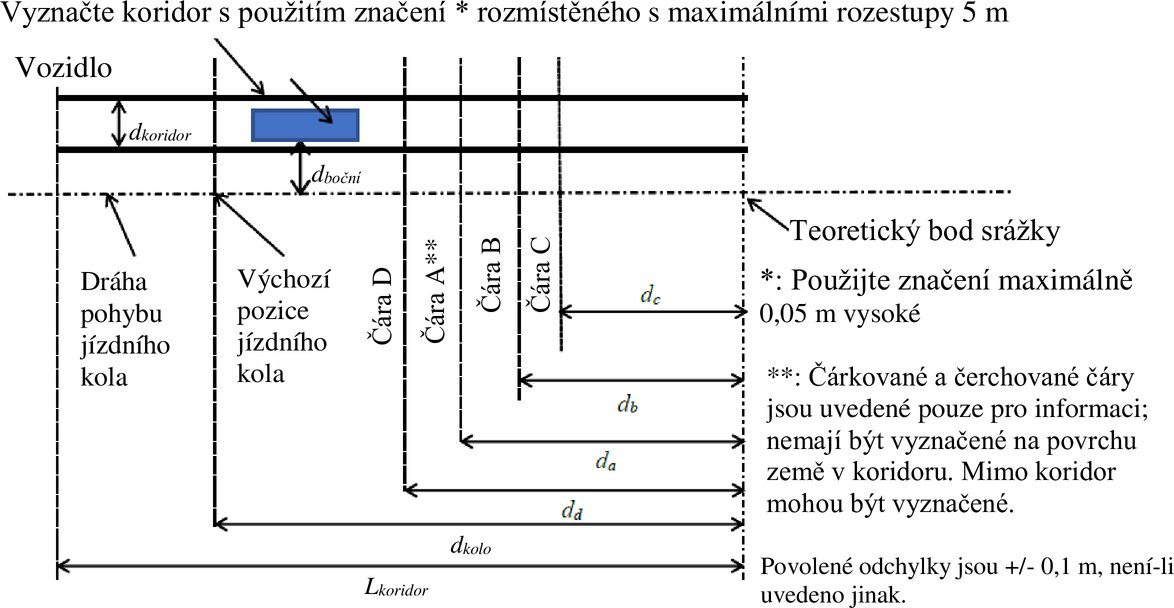
„bodem srážky“ poloha, kde by se dráha kteréhokoliv bodu vozidla protnula s kterýmkoliv bodem jízdního kola, pokud by vozidlo začalo zatáčet. Teoretickým bodem srážky, jak uvádí obrázek 1 v dodatku 1, je bod, ve kterém by za podmínek příslušné zkoušky došlo ke srážce, pokud by vozidlo zatočilo směrem k jízdnímu kolu, např. při zahájení natočení opačným směrem v posledním informačním bodě. Samotný zatáčecí manévr není předmětem zkoušky, neboť informace musí být podána před zahájením zatáčení; |
|
2.8 |
„posledním informačním bodem“ bod, ve kterém musí být informační signál podán. Tento bod předchází očekávanému zatočení vozidla směrem k jízdnímu kolu v situaci, kdy by mohlo dojít ke kolizi; |
|
2.9 |
„blízkou stranou“ strana vozidla, na které se vedle vozidla nachází jízdní kolo. V pravostranném provozu je blízkou stranou vozidla jeho pravá strana; |
|
2.10 |
„informačním signálem“ optický signál, jehož účelem je informovat řidiče vozidla o tom, že se v blízkosti pohybuje jízdní kolo; |
|
2.11 |
„jízdní dráhou vozidla“ linie spojující všechny body, ve kterých se v průběhu zkoušky vyskytl nebo vyskytne pravý přední roh vozidla; |
|
2.12 |
„jízdním kolem“ jízdní kolo spolu s cyklistou. Toto je simulováno ve zkušebních případech uvedených níže v bodech 6.5 a 6.6 pomocí zkušebních zařízení v souladu s ISO [CD] 19206-4. Za referenční bod pro polohu jízdního kola je brán nejpřednější bod na střednici jízdního kola; |
|
2.13 |
„společnou plochou“ plocha, na níž mohou být zobrazeny nejméně dvě informační funkce (např. symboly), nikoliv však současně; |
|
2.14 |
„bočním rozestupem“ vzdálenost mezi vozidlem a jízdním kolem na blízké straně vozidla, přičemž jsou vozidlo a jízdní kolo ve vzájemně rovnoběžné pozici. Tato vzdálenost se měří mezi rovinou rovnoběžnou s podélnou střední rovinou vozidla a dotýkající se jeho vnějšího bočního okraje, bez ohledu na vnější výčnělky zařízení pro nepřímý výhled, a střední podélnou rovinou jízdního kola a je snížena o polovinu šířky jízdního kola, tj. o 250 mm. Vnější boční hrana vozidla je brána v potaz pouze v oblasti od nejpřednějšího bodu vozidla do vzdálenosti 6 metrů směrem dozadu; |
|
2.15 |
„prvním informačním bodem“ nejpřednější bod, ve kterém může být informační signál podán. Jedná se o poslední informační bod s přičtenou vzdáleností odpovídající dráze, kterou vozidlo ujede za 4 vteřiny, přičemž se zohlední rychlost pohybu vozidla a přičte další přídavná vzdálenost, jestliže se místo nárazu nachází ve vzdálenosti kratší než 6 m; |
|
2.16 |
„pravým předním rohem vozidla“ průmět bodu, který je v průsečíku boční roviny vozidla (bez zařízení pro nepřímý výhled) a přední roviny vozidla (bez zařízení pro nepřímý výhled a částí vozidla, které jsou více než 2,0 m nad vozovkou), na povrchu vozovky; |
|
2.17 |
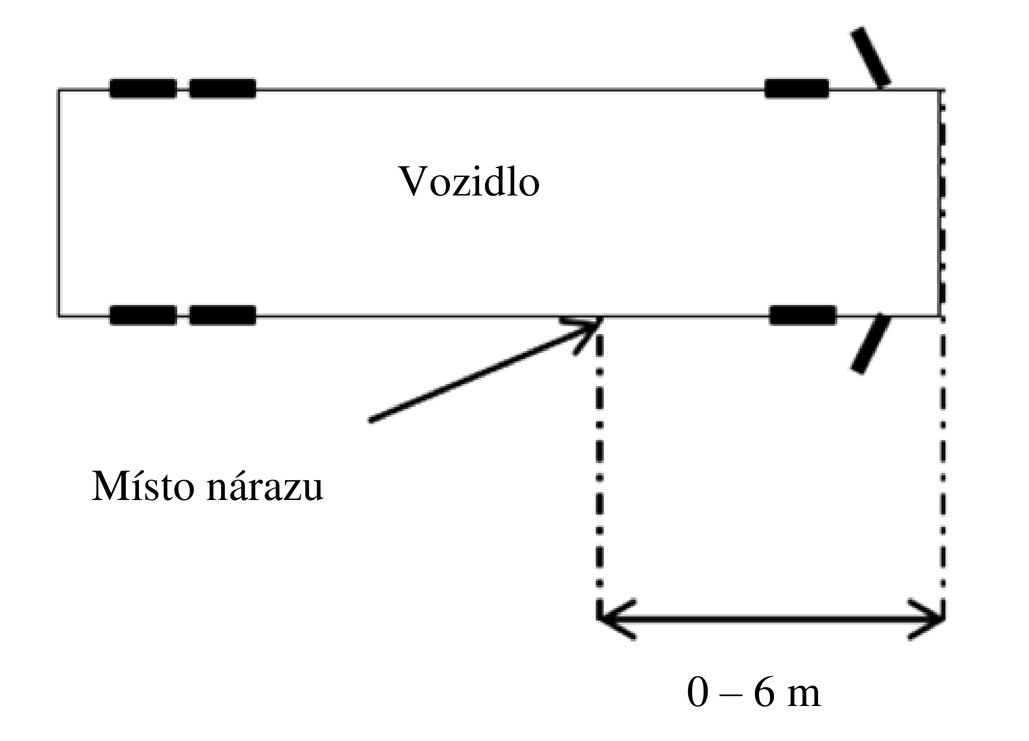
„místem nárazu“ pozice, na které dojde k nárazu jízdního kola do pravé strany vozidla, ve vztahu k pravému přednímu rohu vozidla, v místě, ve kterém obě vozidla dosáhnou bodu srážky, jak je uvedeno na obrázku 3 v dodatku 1; |
|
2.18 |
„hlavním spínačem ovládání vozidla“ zařízení, jímž se palubní elektronický systém vozidla přepne z vypnutého stavu – jako v případě, kdy je vozidlo zaparkované a řidič není přítomen – do běžného provozního režimu. |
3. ŽÁDOST O SCHVÁLENÍ
|
3.1 |
Žádost o schválení typu vozidla z hlediska jeho informačního systému pro eliminaci mrtvého úhlu předkládá výrobce vozidla nebo jím pověřený zástupce. |
|
3.2 |
K žádosti se ve trojím vyhotovení přiloží níže uvedené doklady. Žádost obsahuje tyto údaje: |
|
3.2.1 |
popis typu vozidla z hlediska kritérií uvedených v bodě 5 níže s připojenými rozměrovými výkresy a dokumentací uvedenou v bodě 6.1 níže. Musí být uvedena čísla a/nebo symboly identifikující typ vozidla. |
|
3.3 |
Technické zkušebně provádějící schvalovací zkoušky se dodá vozidlo, jež představuje typ vozidla, který má být schválen. |
4. SCHVÁLENÍ
|
4.1 |
Typ vozidla se schválí, jestliže vozidlo předané ke schválení podle tohoto předpisu splňuje požadavky níže uvedeného bodu 5. |
|
4.2 |
Soulad s požadavky uvedenými níže v bodě 5 se ověří zkušebním postupem definovaným níže v bodě 6, jeho provoz však nesmí být omezen na tyto zkušební podmínky. |
|
4.3 |
Každému schválenému typu vozidla se přidělí číslo schválení typu; jeho první dvě číslice (00 pro původní znění předpisu) označují sérii změn, která zahrnuje poslední zásadní technické změny tohoto předpisu v době vydání schválení. Táž smluvní strana nesmí udělit stejné číslo témuž typu vozidla, vybavenému jiným typem systému ISMU, nebo jinému typu vozidla. |
|
4.4 |
Oznámení o schválení nebo zamítnutí či odnětí schválení podle tohoto předpisu se sdělí stranám dohody uplatňujícím tento předpis prostřednictvím formuláře, který je v souladu se vzorem v příloze 1, a fotografií a/nebo výkresů poskytnutých žadatelem ve formátu nepřesahujícím A4 (210 × 297 mm) nebo složených v tomto formátu a ve vhodném měřítku. |
|
4.5 |
Na každé vozidlo, jež odpovídá typu vozidla schválenému podle tohoto předpisu, se na viditelném a snadno přístupném místě uvedeném na formuláři schválení připevní mezinárodní značka schválení typu, která odpovídá vzoru popsanému v příloze 2 a obsahuje buď: |
|
4.5.1 |
písmeno „E“ v kružnici, za nímž následuje:
|
|
4.5.2 |
písmena „UI“ v oválu, za nimiž následuje jedinečný identifikátor. |
|
4.6 |
Vyhovuje-li vozidlo typu vozidla schválenému podle jednoho nebo více dalších předpisů OSN připojených k dohodě v zemi, která udělila schválení podle tohoto předpisu, není třeba symbol předepsaný v bodě 4.5 opakovat; v takovém případě se číslo předpisu OSN, číslo schválení a doplňkové symboly uvedou ve svislých sloupcích umístěných vpravo od symbolu předepsaného v bodě 4.5. |
|
4.7 |
Značka schválení musí být jasně čitelná a nesmazatelná. |
|
4.8 |
Značka schválení se umístí v blízkosti štítku s údaji o vozidle nebo na tento štítek. |
5. SPECIFIKACE
|
5.1 |
Každé vozidlo opatřené systémem ISMU, který odpovídá definici podle bodu 2.3 výše, musí splňovat požadavky uvedené v bodech 5.2 až 5.7 tohoto předpisu. |
|
5.2 |
Obecné požadavky |
|
5.2.1 |
Účinnost systému ISMU nesmí být nepříznivě ovlivňována působením magnetických nebo elektrických polí. To je nutno prokázat splněním technických požadavků a přechodných ustanovení předpisu OSN č. 10 ve znění série změn 04 nebo jakékoli pozdější série změn. |
|
5.2.2 |
S výjimkou vnějších prvků systému ISMU, které jsou součástí jiného zařízení podléhajícího zvláštním požadavkům na vyčnívání, mohou vnější prvky systému ISMU přečnívat šířku vozidla až o 100 mm. |
|
5.3 |
Výkonnostní požadavky |
|
5.3.1 |
Systém ISMU informuje pomocí optické signalizace řidiče o okolních jízdních kolech, která by mohla být případným zatáčením ohrožena, aby bylo možné vozidlo zastavit předtím, než překříží dráhu jízdního kola.
V případě, že vozidlo stojí, informuje systém řidiče o blížících se jízdních kolech předtím, než jízdní kolo dosáhne přední hrany vozidla, s přihlédnutím k reakční době 1,4 vteřiny. Toto se zkouší v souladu s bodem 6.6. Systém ISMU upozorní řidiče pomocí optického, akustického, haptického signálu nebo jakoukoliv kombinací těchto signálů v případě, že se nebezpečí srážky zvýší. Optický informační signál musí trvat pouze po dobu, po kterou jsou splněny podmínky uvedené v bodě 5.3.1.4 níže. Deaktivace informačního signálu v důsledku odklonu vozidla od dráhy jízdního kola není povolena, pokud by při zatočení zpět směrem ke dráze jízdního kola byl střet mezi vozidlem a jízdním kolem stále možný. |
|
5.3.1.1 |
Informační signál musí splňovat požadavky uvedené v bodě 5.4 níže. |
|
5.3.1.2 |
Výstražný signál musí splňovat požadavky uvedené v bodě 5.5 níže. Může být manuálně deaktivován. V případě manuální deaktivace se musí znovu aktivovat při každé aktivaci hlavního spínače ovládání vozidla. |
|
5.3.1.3 |
Systém ISMU musí fungovat alespoň při všech dopředných rychlostech vozidla od stání do 30 km/h při okolních světelných podmínkách nad 15 luxů. |
|
5.3.1.4 |
Systém ISMU musí podat informační signál v posledním informačním bodě v případě, že se jízdní kolo pohybuje v rozmezí rychlosti 5 km/h až 20 km/h při boční vzdálenosti jízdního kola od vozidla v rozmezí 0,9 m až 4,25 m, pokud by tento pohyb mohl vést ke srážce mezi jízdním kolem a vozidlem s místem nárazu vzdáleném 0 až 6 m od pravého předního rohu vozidla, pokud by řidič vozidla běžným způsobem otočil volantem. Informační signál se však nevyžaduje, je-li relativní podélná vzdálenost mezi jízdním kolem a pravým předním rohem vozidla větší než 30 m směrem dozadu nebo 7 m dopředu.
Informační signál nesmí být viditelný před prvním informačním bodem. Musí být podán mezi prvním a posledním informačním bodem. První informační bod může být vypočten pro kterékoliv místo nárazu přičtením rozdílu mezi šesti metry a místem nárazu. Systém též musí podat informační signál, pokud detekuje jízdní kolo v boční vzdálenosti 0,25 m až 0,9 m v situaci, kdy se jízdní kolo nachází v podélném směru přinejmenším na úrovni nejpřednějšího předního kola při jízdě v přímém směru. |
|
5.3.1.5 |
Výrobce vozidla zajistí, aby byl minimalizován počet falešně pozitivních výstrah způsobených detekcí statických předmětů, které nejsou zranitelnými účastníky silničního provozu, jako např. dopravních kuželů a značek, živých plotů a zaparkovaných automobilů. Může však podat informační signál, pokud bezprostředně hrozí kolize. |
|
5.3.1.6 |
Systém ISMU se automaticky deaktivuje, pokud není schopen řádně fungovat v důsledku znečištění svých senzorů ledem, sněhem, blátem, nečistotami nebo podobným materiálem, případně v důsledku okolních světelných podmínek, které jsou pod úrovní hodnot popsaných v bodě 5.3.1.3. Tato skutečnost musí být vyznačena způsobem uvedeným v bodě 5.6.2. Systém se automaticky reaktivuje, pokud se znečištění odstraní a ověří se normální funkčnost systému. Toto se zkouší v souladu s ustanoveními v bodě 6.9 níže. |
|
5.3.1.7 |
Systém ISMU rovněž upozorní řidiče výstrahou v případě selhání systému ISMU, které znemožní splnění požadavků tohoto předpisu. Tato výstraha musí odpovídat bodu 5.6.1. Toto se zkouší v souladu s ustanoveními v bodě 6.8 níže (zkouška detekce poruchy). |
|
5.3.2 |
Výrobce s využitím dokumentace, simulace nebo jakýmkoli jiným způsobem prokáže ke spokojenosti technické zkušebny a schvalovacího orgánu, že systém ISMU funguje v souladu se specifikacemi i při detekci menších jízdních kol a menších cyklistů, s tolerancí do 36 % od hodnot uvedených v normě ISO [CD] 19206-4:2018. |
|
5.4 |
Informační signál |
|
5.4.1 |
Informace o mrtvém úhlu uvedená výše v bodě 5.3.1.1 musí být podána v podobě signálu, který je pro řidiče rozpoznatelný a snadno ověřitelný ze sedadla řidiče. Tento informační signál musí být viditelný za denního světla i v noci. |
|
5.4.2 |
Zařízení vyzařující informační signál musí být umístěno na blízké straně v horizontálním úhlu větším než 30° směrem k ose rovnoběžné s podélnou střední rovinou vozidla a musí procházet zorným referenčním bodem. Pokud je místo k sezení řidiče umístěno na blízké straně vozidla, může být tato hodnota snížena. |
|
5.5 |
Výstražný signál |
|
5.5.1 |
Výstražný signál uvedený v bodě 5.3.1.2 výše se musí lišit od informačního signálu specifikovaného v bodě 5.4, např. režimem nebo aktivační strategií. |
|
5.5.2 |
Pro řidiče musí být zjevná spojitost mezi výstražným signálem a možností srážky. Pokud má výstražný signál podobu optického signálu, musí být viditelný za denního světla i v noci. |
|
5.5.3 |
Výstražný signál musí být aktivován nejdříve v okamžiku, kdy systém zjistí možnost srážky (např. kvůli zamýšlenému zabočení směrem k jízdnímu kolu), např. vyhodnocením vzdálenosti mezi vozidlem a jízdním kolem nebo průsečíku jejich drah, aktivací ukazatelů změny směru apod. Strategie je popsána v informacích uvedených v bodě 6.1. Nesmí záviset pouze na aktivaci ukazatelů změny směru.
Technická zkušebna ověří funkci systému v souladu s uvedenou strategií. |
|
5.6 |
Výstražný signál při selhání |
|
5.6.1 |
Výstražný signál při selhání uvedený v bodě 5.3.1.7 musí být optickým výstražným signálem žluté barvy a musí být jiný než informační signál, nebo od něj musí být zřetelně rozlišitelný. Výstražný signál při selhání musí být viditelný za denního světla i v noci a musí být pro řidiče snadno ověřitelný z jeho sedadla. |
|
5.6.2 |
Optický výstražný signál uvedený v bodě 5.3.1.6 upozorní na to, že systém ISMU není dočasně k dispozici. Tento signál musí být aktivní po celou dobu, po kterou systém ISMU není k dispozici. Pro tento účel se může použít výstražný signál při selhání uvedený výše v bodě 5.3.1.7. |
|
5.6.3 |
Optické výstražné signály při selhání systému ISMU se musí znovu aktivovat při každé aktivaci hlavního spínače ovládání vozidla. Tento požadavek se nevztahuje na výstražné signály zobrazované na společné ploše. |
|
5.7 |
Ustanovení o kontrole |
|
5.7.1 |
Správný provozní stav systému ISMU musí být možné ověřit vizuální kontrolou stavu výstražného signálu při selhání. |
6. ZKUŠEBNÍ POSTUP
|
6.1 |
Výrobce musí poskytnout soubor dokumentace obsahující údaje o základní konstrukci systému a v příslušném případě o způsobu napojení na jiné systémy vozidla. Fungování systému, včetně jeho strategie snímání a výstrah, musí být vysvětlené a dokumentace musí obsahovat popis způsobu kontroly funkčního stavu systému, informaci, zda existuje vliv na jiné systémy vozidla, a také popis metody/metod používané/používaných pro zjištění situací vedoucích k zobrazení výstražného signálu při selhání. Soubor dokumentace musí schvalovacímu orgánu poskytnout dostatečné informace k určení povahy nejméně příznivých podmínek a pomoci mu při rozhodování o jejich výběru. |
|
6.2 |
Zkušební podmínky |
|
6.2.1 |
Zkouška se provádí na plochém a suchém asfaltovém nebo betonovém povrchu. |
|
6.2.2 |
Okolní teplota se musí pohybovat mezi 0 °C a 45 °C. |
|
6.2.3 |
Zkouška se provádí za podmínek viditelnosti, které umožňují bezpečnou jízdu v požadované zkušební rychlosti. |
|
6.3 |
Stav vozidla |
|
6.3.1 |
Hmotnost při zkoušce
Vozidlo se může zkoušet s jakýmkoli zatížením, přičemž rozložení hmotnosti na nápravy musí být stanoveno výrobcem vozidla, aniž by byla překročena maximální přípustná hmotnost na každou z náprav. Po zahájení zkoušky se nesmí provést žádná změna. Výrobce vozidla musí prostřednictvím dokumentace prokázat, že systém funguje při každém zatížení. |
|
6.3.2 |
Tlak v pneumatikách v průběhu zkoušky vozidla musí odpovídat běžným provozním podmínkám. |
|
6.3.3 |
V případě, že je systém ISMU vybaven uživatelsky nastavitelným načasováním podávání informačního signálu, provede se zkouška uvedená níže v bodech 6.5 a 6.6 pro každý zkušební případ s prahem pro informační signál nastavený tak, aby byl tento signál podán co nejblíže k bodu nárazu, tzn. při nastavení nejméně příznivých podmínek. Po zahájení zkoušky se nesmí provést žádná změna. |
|
6.4 |
Ověřovací zkouška optických výstražných signálů při selhání |
|
6.4.1 |
U stojícího vozidla se kontroluje, jestli jsou výstražné signály v souladu s požadavky uvedenými v bodě 5.6 výše. |
|
6.4.2 |
U stojícího vozidla se aktivují informační a výstražné signály popsané v bodech 5.4 a 5.5 a ověří se, že tyto signály odpovídají požadavkům uvedeným v těchto bodech. |
|
6.5 |
Dynamická zkouška informačního systému pro eliminaci mrtvého úhlu |
|
6.5.1 |
Podle obrázku 1 v dodatku 1 k tomuto předpisu vytvořte pomocí značení a makety jízdního kola koridor s rozměry stanovenými v tabulce 1 v dodatku 1 k tomuto předpisu. |
|
6.5.2 |
Umístěte maketu jízdního kola na příslušnou výchozí pozici podle obrázku 1 v dodatku 1 k tomuto předpisu. |
|
6.5.3 |
V souladu s obrázkem 1 v dodatku 1 k tomuto předpisu umístěte na sloupku u vstupu do koridoru místní dopravní značku odpovídající značce C14 podle Vídeňské úmluvy o silničních značkách a signálech (3) (nejvyšší dovolená rychlost 50 km/h) nebo místní označení, které je této značce významově nejbližší. Nejnižší bod této značky musí být umístěn ve výšce 2 m nad povrchem zkušební dráhy. |
|
6.5.4 |
Jeďte vozidlem skrz koridor rychlostí uvedenou v tabulce 1 v dodatku 1 k tomuto předpisu s dovolenou odchylkou ±2 km/h. |
|
6.5.5 |
Během zkoušky nepoužívejte ukazatele změny směru. |
|
6.5.6 |
Umístěte maketu jízdního kola v příslušné výchozí poloze podle obrázku 1 v dodatku 1 k tomuto předpisu. Maketa se musí pohybovat v přímé linii, jak je znázorněno na obrázku 1 v dodatku 1. Zrychlení makety musí být takové, aby maketa dosáhla rychlosti pro příslušnou zkoušku podle tabulky 1 po ujetí vzdálenosti ne větší než 5,66 m, přičemž po tomto zrychlení se maketa musí po dalších nejméně 8 vteřin pohybovat stálou rychlostí s povolenou odchylkou ± 0,5 km/h. Maketa překročí čáru A (viz obrázek 1 v dodatku 1) s povolenou odchylkou ±0,5 m ve stejném okamžiku, jako vozidlo překročí čáru B (viz obrázek 1 v dodatku 1) s povolenou odchylkou ±0,5 m.
Pokud není možné dosáhnout zrychlení na dané vzdálenosti, upraví se výchozí pozice makety jízdního kola a délka koridoru vozidla o stejnou vzdálenost. Nejvyšší přípustné boční vychýlení makety od přímky spojující výchozí pozici a teoretický bod srážky (jak jsou znázorněny na obrázku 1 v dodatku 1) je ±0,2 m. |
|
6.5.7 |
Ověřte, zda byl aktivován informační signál systému pro eliminaci mrtvého úhlu předtím, než vozidlo překročilo čáru C podle obrázku 1 v dodatku 1 k tomuto předpisu a zda nebyl aktivován předtím, než vozidlo překročilo čáru D podle obrázku 1. |
|
6.5.8 |
Ověřte, zda během doby, kdy se maketa jízdního kola nepohybovala, nebyl informační signál systému pro eliminaci mrtvého úhlu aktivován, když vozidlo míjelo dopravní značku a značení. |
|
6.5.9 |
Opakujte pokyny v bodech 6.5.1 až 6.5.8 pro zkušební případy uvedené v tabulce 1 v dodatku 1 k tomuto předpisu.
V opodstatněných případech může technická zkušebna při dodržení rozsahu rychlosti vozidla, rychlosti jízdního kola a boční vzdálenosti, které jsou uvedené v bodech 5.3.1.3 a 5.3.1.4, vybrat další zkušební případy, jiné, než ty, které jsou uvedené v tabulce 1 v dodatku 1. Technická zkušebna ověří, že by kombinace parametrů ve zvolených zkušebních případech vedla ke srážce mezi jízdním kolem a vozidlem v místě nárazu v rozmezí stanoveném v bodě 5.3.1.4, a pomocí vhodné úpravy startovacích vzdáleností a délky koridoru pro vozidlo a jízdní kolo zajistí, že se vozidlo při přejetí čáry C podle obrázku 1 v dodatku 1 pohybuje stanovenou rychlostí. Pokud jsou provedeny jiné zkušební případy než ty, které jsou uvedeny v tabulce 1 v dodatku 1 tohoto předpisu, považuje se kritérium „první informační bod“ za splněné. |
|
6.5.10 |
Zkouška je úspěšná, pokud byl ve všech zkušebních případech podle tabulky 1 dodatku 1 tohoto předpisu informační signál systému pro eliminaci mrtvého úhlu aktivován předtím, než nejpřednější bod vozidla dosáhl čáry C, ale ne dříve, než nejpřednější bod vozidla dosáhl čáry D (viz bod 6.5.7 výše, kde je čára D relevantní pouze pro zkušební případy z tabulky 1 v dodatku 1) a informační signál systému pro eliminaci mrtvého úhlu nebyl při žádné zkoušce aktivován v okamžiku, kdy vozidlo míjelo dopravní značku (viz bod 6.5.8). Informační signál se však nevyžaduje, je-li relativní podélná vzdálenost mezi jízdním kolem a pravým předním rohem vozidla větší než 30 m směrem dozadu nebo 7 m dopředu.
Pro rychlosti vozidla do 5 km/h se považuje za vyhovující, pokud je informační signál aktivován 1,4 vteřiny předtím, než jízdní kolo dosáhne teoretického bodu srážky podle obrázku 1 v dodatku 1. Pro rychlosti vozidla nad 25 km/h, kdy je brzdná dráha delší než 15 m, musí hodnota dc podle obrázku 1 v dodatku 1 odpovídat hodnotám uvedeným v tabulce 2 v dodatku 1. |
|
6.6 |
Statická zkouška informačního systému pro eliminaci mrtvého úhlu |
|
6.6.1 |
Statická zkouška typu 1
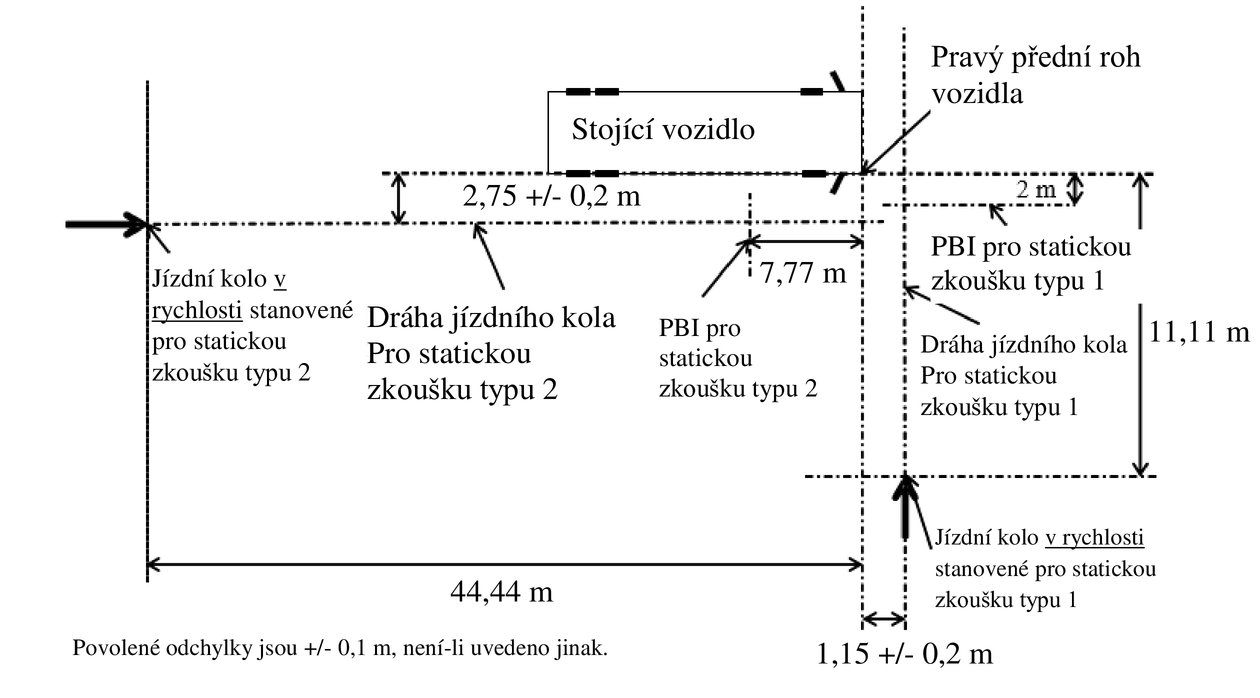
Zkoušené vozidlo při této zkoušce stojí. Pohybujte maketou jízdního kola rychlostí 5 ± 0,5 km/h s dovolenou boční odchylkou 0,2 m kolmo k podélné střední rovině vozidla s místem nárazu nacházejícím se 1,15 m před nejpřednějším bodem vozidla, jak je znázorněno na obrázku 2 v dodatku 1. Zkouška je úspěšná, pokud je informační signál systému pro eliminaci mrtvého úhlu aktivován nejpozději v okamžiku, kdy je jízdní kolo od vozidla vzdáleno 2 m. |
|
6.6.2 |
Statická zkouška typu 2
Zkoušené vozidlo při této zkoušce stojí. Pohybujte maketou jízdního kola rychlostí 20 ± 0,5 km/h ve vzdálenosti 2,75 ± 0,2 m od boku vozidla rovnoběžně s podélnou střední rovinou vozidla, jak je znázorněno na obrázku 2 v dodatku 1. Jízdní kolo by se mělo pohybovat konstantní rychlostí nejméně 44 m předtím, než mine nejpřednější bod vozidla. Zkouška je úspěšná, pokud je informační signál systému pro eliminaci mrtvého úhlu aktivován nejpozději v okamžiku, kdy je kolo vzdáleno 7,77 m od průmětu nejpřednějšího bodu vozidla na přímku, po které se jízdní kolo pohybuje. |
|
6.7 |
Výrobce s využitím dokumentace, simulace nebo jakýmkoli jiným způsobem prokáže ke spokojenosti technické zkušebny a schvalovacího orgánu, že se informační signál systému pro eliminaci mrtvého úhlu v souladu s bodem 6.5.10 neaktivuje tím, že vozidlo míjí běžné nehybné předměty jiné než dopravní značky. Toto se zejména týká zaparkovaných automobilů a dopravních kuželů. |
|
6.8 |
Zkouška detekce poruchy |
|
6.8.1 |
Simulujte poruchu systému ISMU, například přerušením dodávky energie do jakékoliv konstrukční části systému ISMU nebo přerušením jakéhokoliv elektrického spojení mezi konstrukčními částmi systému ISMU. Elektrická spojení výstražného signálu selhání podle bodu 5.6.1 nesmí být při simulaci poruchy systému ISMU odpojena. |
|
6.8.2 |
Výstražný signál při selhání uvedený výše v bodě 5.3.1.7 a popsaný v bodě 5.6.1 se aktivuje a musí zůstat aktivovaný po dobu jízdy vozidla a při každé aktivaci hlavního spínače ovládání vozidla se musí znovu aktivovat, dokud simulované selhání trvá. |
|
6.9 |
Zkouška automatické deaktivace |
|
6.9.1 |
|Některý ze senzorů systému zcela znečistěte látkou (např. na bázi vody) srovnatelnou se sněhem, ledem nebo blátem. Systém ISMU se musí automaticky deaktivovat a tento stav musí být signalizován, jak je popsáno v bodě 5.6.2. |
|
6.9.2 |
Ze senzorů systému zcela odstraňte znečištění a reaktivujte hlavní spínač ovládání vozidla. Systém ISMU se automaticky znovu uvede do činnosti po době jízdy nepřekračující 60 vteřin. |
7. ZMĚNA TYPU VOZIDLA A ROZŠÍŘENÍ SCHVÁLENÍ
|
7.1 |
Každá změna typu vozidla uvedená v bodě 2.2 tohoto předpisu se oznámí schvalovacímu orgánu, který udělil schválení typu vozidla. Schvalovací orgán pak může buď: |
|
7.1.1 |
usoudit, že provedené změny nemají nepříznivý účinek na podmínky udělení schválení, a udělit rozšíření schválení; |
|
7.1.2 |
nebo usoudit, že provedené změny mají vliv na podmínky udělení schválení, a před udělením rozšíření schválení si vyžádat provedení dalších zkoušek nebo kontrol. |
|
7.2 |
Potvrzení nebo odmítnutí schválení s uvedením změn se sdělí smluvním stranám dohody, které uplatňují tento předpis, postupem stanoveným v bodě 4.4 výše. |
|
7.3 |
Schvalovací orgán informuje ostatní smluvní strany o rozšíření prostřednictvím formuláře sdělení uvedeného v příloze 1 tohoto předpisu. Každému rozšíření přiřadí pořadové číslo, které se označuje jako číslo rozšíření. |
8. SHODNOST VÝROBY
|
8.1 |
Postupy týkající se shodnosti výroby odpovídají obecným ustanovením stanoveným v článku 2 a dodatku 1 dohody (E/ECE/TRANS/505/Rev.3) a splňují tyto požadavky: |
|
8.2 |
Vozidlo schválené podle tohoto předpisu musí být vyrobeno tak, aby odpovídalo typu schválenému na základě splnění výše uvedených požadavků bodu 5. |
|
8.3 |
Schvalovací orgán, který uděluje schválení typu, může kdykoliv ověřit shodnost kontrolních metod používaných v jednotlivých výrobních jednotkách. Obvyklá četnost těchto kontrol je jednou za dva roky. |
9. POSTIHY ZA NESHODNOST VÝROBY
|
9.1 |
Schválení udělené, pokud jde o typ vozidla, v souladu s tímto předpisem lze odejmout v případě, že nejsou dodržovány požadavky podle bodu 8 výše. |
|
9.2 |
Pokud smluvní strana odejme schválení, které dříve udělila, neprodleně to zasláním formuláře sdělení podle vzoru uvedeného v příloze 1 tohoto předpisu oznámí ostatním smluvním stranám, které uplatňují tento předpis. |
10. DEFINITIVNÍ UKONČENÍ VÝROBY
Pokud držitel schválení zcela ukončí výrobu typu vozidla schváleného v souladu s tímto předpisem, informuje o tom schvalovací orgán, který udělil schválení, a ten o tom prostřednictvím formuláře sdělení podle vzoru uvedeného v příloze 1 tohoto předpisu informuje ostatní smluvní strany dohody, jež uplatňují tento předpis.
11. NÁZVY A ADRESY TECHNICKÝCH ZKUŠEBEN ODPOVĚDNÝCH ZA PROVÁDĚNÍ SCHVALOVACÍCH ZKOUŠEK A NÁZVY A ADRESY SCHVALOVACÍCH ORGÁNŮ
Smluvní strany dohody, jež uplatňují tento předpis, sdělí sekretariátu Organizace spojených národů názvy a adresy technických zkušeben odpovědných za provádění zkoušek schválení typu a názvy a adresy schvalovacích orgánů, které udělují schválení typu a kterým se mají zasílat formuláře potvrzující schválení nebo rozšíření nebo zamítnutí nebo odnětí schválení.
(1) viz příloha 1 Úplného znění usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev.6,www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Rozlišovací čísla smluvních stran dohody z roku 1958 jsou uvedena v příloze 3 Úplného usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev.6.
(3) Viz ECE/TRANS/196, bod 91 v Úmluvě o silničních značkách a signálech Evropské dohody z roku 1968 doplňující Úmluvu a protokol o silničním značení, dodatek k Evropské dohodě.
Dodatek 1
Tabulka 1
Zkušební případy
|
V tabulce níže jsou uvedeny zkušební případy s použitím těchto proměnných: |
|
|
v vozidlo |
ustálená rychlost vozidla |
|
v kolo |
ustálená rychlost jízdního kola |
|
d a |
pozice jízdního kola v okamžiku, kdy vozidlo přejede čáru b |
|
d b |
pozice vozidla v okamžiku, kdy jízdní kolo přejede čáru a |
|
d c |
pozice vozidla v posledním informačním bodě |
|
d d |
pozice vozidla v prvním informačním bodě (d c + (6 m – místo nárazu) + 11,11 m pro rychlost vozidla 10 km/h a dc+(6 m – místo nárazu) + 22,22 m pro rychlost vozidla 20 km/h) |
|
d kolo |
výchozí pozice jízdního kola |
|
l koridor |
délka koridoru vozidla |
|
d koridor |
šířka koridoru vozidla |
|
d boční |
boční vzdálenost mezi jízdním kolem a vozidlem |
Následující proměnné nespecifikují zkušební případy, jsou uvedeny pouze pro informaci (nemají vliv na parametry zkoušky):
|
(a) |
Místo nárazu [m] udává místo nárazu, pro které byly vypočteny hodnoty d a a d b v tabulce 1 (d d se vždy počítá buď pro místo nárazu 6 m, nebo pro začátek synchronizovaného pohybu v případě, že se vozidlo a jízdní kolo pohybují stejnou rychlostí). |
|
(b) |
Poloměr otáčení [m] udává poloměr otáčení, pro který byly vypočteny hodnoty d a a d b v tabulce 1.
Tabulka 2 d c pro rychlosti nad 25 km/h
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
PŘÍLOHA 1
Sdělení
(maximální formát: A4 (210 × 297 mm))
|
|
Vydal: název správního orgánu: … … |
|
ve věci (2): |
Udělení schválení |
|
|
Rozšíření schválení |
|
|
Odmítnutí schválení |
|
|
Odnětí schválení |
|
|
Definitivní ukončení výroby |
typu vozidla z hlediska informačního systému pro eliminaci mrtvého úhlu (ISMU) podle předpisu OSN č. 151
Schválení č.: …
|
1. |
Ochranná známka: … |
|
2. |
Typ a obchodní název (názvy): … |
|
3. |
Název a adresa výrobce: … |
|
4. |
Případně název a adresa zástupce výrobce: … |
|
5. |
Stručný popis vozidla: … |
|
6. |
Datum předání vozidla ke schválení: … |
|
7. |
Technická zkušebna odpovědná za provádění schvalovacích zkoušek … |
|
8. |
Datum protokolu vydaného touto zkušebnou: … |
|
9. |
Číslo protokolu vydaného touto zkušebnou: … |
|
10. |
Důvod (důvody) případného rozšíření: … |
|
11. |
Schválení, pokud jde o systém ISMU, uděleno/zamítnuto 2: |
|
12. |
Místo: … |
|
13. |
Datum: … |
|
14. |
Podpis: … |
|
15. |
K tomuto sdělení se připojují tyto dokumenty opatřené výše uvedeným číslem schválení: … |
|
16. |
Poznámky: … |
(1) Rozlišovací číslo země, která schválení udělila/rozšířila/odmítla/odňala (viz ustanovení o schválení v tomto předpisu).
(2) Nehodící se škrtněte.
PŘÍLOHA 2
Uspořádání značek schválení typu
(viz body 4.5 až 4.5.2 tohoto předpisu)
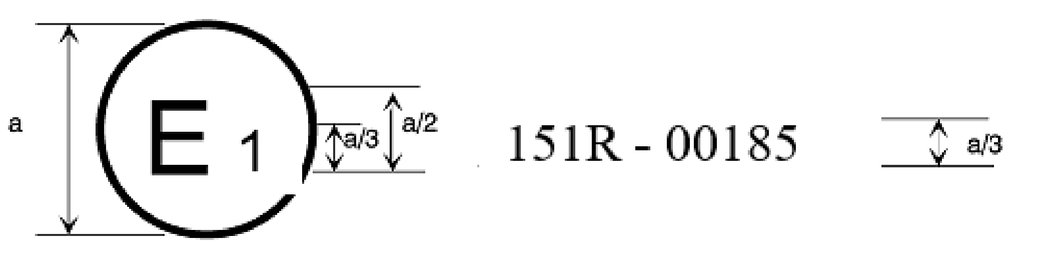
a = minimálně 8 mm
Výše uvedená značka schválení typu umístěná na vozidle udává, že tento typ vozidla byl z hlediska svého informačního systému pro eliminaci mrtvého úhlu schválen podle předpisu č. 151 v Německu (E1). První dvě číslice čísla schválení udávají, že schválení bylo uděleno v souladu s požadavky předpisu OSN č. 151 v jeho původním znění.
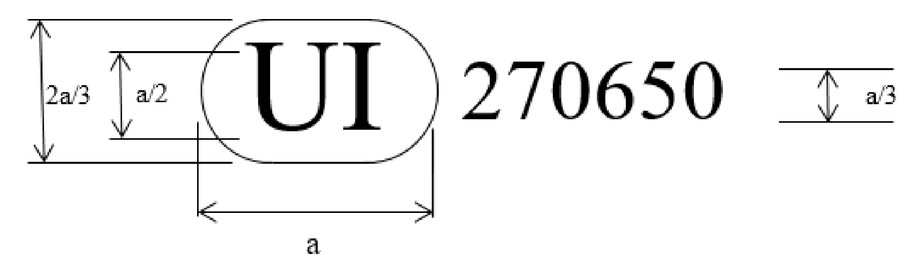
a = minimálně 8 mm
Výše uvedený jedinečný identifikátor značí, že tento typ vozidla byl schválen a že příslušné informace o tomto schválení typu jsou k dispozici v zabezpečené internetové databázi OSN pod jedinečným identifikátorem 270650. Případné předřazené nuly v jedinečném identifikátoru mohou být na značce schválení vynechány.
PŘÍLOHA 3
Postup stanovení požadavků na výkonnost pro zkušební případy odlišné od těch, které jsou uvedeny v tabulce zkušebních případů
V souladu s bodem 6.5.9 může technická zkušebna provést jiné zkušební případy, než ty, které jsou uvedeny v tabulce 1 v dodatku 1. V takovém případě je technická zkušebna povinna ověřit, že zvolená sada parametrů by vedla ke kritické situaci. Následující postup pomáhá upřesnit požadavky na výkonnost.
d a – hodnota d a se použije pro synchronizaci pohybu vozidla a jízdního kola. Spočítá se vynásobením rychlosti jízdního kola, která je uvedená v tabulce, osmi vteřinami jízdy konstantní rychlostí:
d a = 8s • v Bicycle
d b – hodnota d b se použije pro synchronizaci pohybu vozidla a jízdního kola. Skládá se ze tří částí: První část odpovídá 8 vteřinám jízdy nákladního vozidla konstantní rychlostí:
d b,1 = 8s • v Vehicle
Druhá část posunuje synchronizaci při zohlednění místa nárazu jízdního kola. To je dáno místem nárazu L:
d b,2 = L
Ve třetí části je zohledněna skutečnost, že nákladní vozidlo urazí k místu srážky delší dráhu, neboť se při zatáčení pohybuje po dráze s konstantním poloměrem, zatímco jízdní kolo jede rovně.
Úsek zatáčení přibližně odpovídá kruhu s konstantním poloměrem, který končí v místě, kde je dosaženo požadované boční vzdálenosti. Hodnotu d b je proto nutné upravit o rozdíl mezi vzdáleností ujetou při přímočaré jízdě a při zatáčení.
Vypočítá se pomocí hodnot poloměru otáčení R, boční vzdálenosti Y=d boční + 0,25 m (vzdálenost mezi střednicí jízdního kola a okrajem vozidla) a místa nárazu L.

Výsledná hodnota pro d b se získá odečtením částí d b,2 a d b,3 od hodnoty d b,1:

Hodnota d c určuje poslední informační bod. Pro rychlost vozidla 10 km/h a vyšší je to vyšší z těchto dvou hodnot:
první hodnota byla odvozena z fyzických zkoušek a vyjadřuje vzdálenost bodu, ve kterém vozidlo začne nejdříve zatáčet směrem ven, od místa srážky; tato hodnota je:
15 m.
Druhou hodnotou je brzdná dráha s ohledem na reakční dobu a brzdné zpomalení a za použití parametrů zpomalení (5 m/s2) a reakční doba (1,4 vteřiny):
![]()
Hodnota d c je proto definována takto:

U rychlostí vozidla nižších než 5 km/h je dostačující, pokud je informační signál podán ve vzdálenosti odpovídající hodnotě TTC 1,4 vteřiny (podobně jako u statické zkoušky).
Hodnota d d je první informační bod. Vypočítá se jako součet vzdálenosti, kterou vozidlo ujede za 4 vteřiny, a hodnoty d c, přičemž se hodnota upraví o místo nárazu v případě, že místo nárazu není 6 m:
d d = d c + 4s • v Vehicle + (6m - Impact Position).
Na základě těchto vzorců lze kompletně vyplnit tabulku 1 v dodatku 1 u jiných zkušebních případů, než které jsou tam vymezeny.