(EHK/OSN) č. 79Předpis Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 79 – Jednotná ustanovení pro schvalování vozidel z hlediska mechanismu řízení [2018/1947]
| Publikováno: | Úř. věst. L 318, 14.12.2018, s. 1-50 | Druh předpisu: | Nařízení |
| Přijato: | 14. prosince 2018 | Autor předpisu: | Evropská komise |
| Platnost od: | 16. října 2018 | Nabývá účinnosti: | 16. října 2018 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
Pouze původní texty EHK/OSN mají podle mezinárodního veřejného práva právní účinek. Je zapotřebí ověřit si status a datum vstupu tohoto předpisu v platnost v nejnovější verzi dokumentu EHK OSN o statusu TRANS/WP.29/343, který je k dispozici na internetové adrese:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Předpis Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 79 – Jednotná ustanovení pro schvalování vozidel z hlediska mechanismu řízení [2018/1947]
Zahrnuje veškerá platná znění až po:
sérii změn 03 – datum vstupu v platnost: dne 16. října 2018
OBSAH
PŘEDPIS
Úvod
|
1. |
Oblast působnosti |
|
2. |
Definice |
|
3. |
Žádost o schválení |
|
4. |
Schválení |
|
5. |
Požadavky na konstrukci |
|
6. |
Požadavky na zkoušky |
|
7. |
Shodnost výroby |
|
8. |
Postihy za neshodnost výroby |
|
9. |
Změny a rozšíření schválení typu vozidla |
|
10. |
Definitivní ukončení výroby |
|
11. |
Názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek a názvy a adresy schvalovacích orgánů |
|
12. |
Přechodná ustanovení |
PŘÍLOHY
|
1. |
Sdělení ve věci udělení nebo zamítnutí nebo rozšíření nebo odnětí schválení nebo definitivního ukončení výroby typu vozidla z hlediska mechanismu řízení podle předpisu č. 79 |
|
2. |
Uspořádání značek schválení |
|
3. |
Brzdný účinek u vozidel využívajících téhož zdroje energie pro napájení mechanismu řízení i brzdového zařízení |
|
4. |
Doplňková ustanovení pro vozidla vybavená pomocným mechanismem řízení |
|
5. |
Požadavky na přípojná vozidla s hydraulickými převody řízení |
|
6. |
Zvláštní požadavky týkající se bezpečnostních hledisek elektronických řídicích systémů |
|
7. |
Zvláštní požadavky na dodávání elektrické energie z tažného vozidla do systémů řízení přípojného vozidla |
|
8. |
Požadavky na zkoušky funkcí korektivního a automatického řízení |
ÚVOD
Účelem tohoto předpisu je zavést jednotná ustanovení pro uspořádání a provedení systémů řízení, kterými jsou vybavena vozidla používaná na silnici. Hlavní požadavek byl tradičně kladen na to, aby hlavní systém řízení měl mechanické spojovací zařízení mezi ovládacím orgánem řízení, obvykle volantem, a koly, a aby tím byl určován směr pohybu vozidla. Mechanické spojovací zařízení, je-li dostatečně dimenzováno, bylo považováno za neporuchovou součást.
Důsledkem rozvíjející se technologie ve spojení s požadavkem na zvýšení bezpečnosti cestujících odstraněním sloupku mechanického řízení, jakož i pokročilých možností výroby, jež souvisí se snadnějším přemístěním ovládacího orgánu řízení z levé strany u vozidel s levostranným řízením na pravou u vozidel s pravostranným řízením a naopak, je přehodnocení tradičního přístupu a nynější změna tohoto předpisu, která bere ohled na nové technologie. V souladu s tím bude nyní možné konstruovat řídicí systémy, které neobsahují žádné mechanické spojovací zařízení mezi ovládacím orgánem řízení a koly.
Systémy, jež řidiči ponechají možnost primárního ovládání vozidla, ale jsou podporovány systémem řízení, který je ovlivňován signály vyvolávanými ve vozidle, jsou definovány jako „vyspělé systémy pro podporu řízení“. Takové systémy mohou mít zabudovánu „funkci automatického řízení“, která např. využívá pasivních prvků infrastruktury pro podporu řidiče při udržování vozidla v ideální jízdní stopě (systémy pro udržování vozidla v jízdním pruhu „Lane Guidance“, „Lane Keeping“ nebo systém řízení směru jízdy vozidla „Heading Control“), pro podporu řidiče při manévrování vozidlem při nízké rychlosti v omezeném prostoru nebo při hledání předdefinovaného místa pro přestávku v jízdě (systém pro navádění vozidla na autobusové zastávky „Bus Stop Guidance“). Vyspělé systémy pro podporu řízení mohou mít rovněž zabudovánu „funkci korektivního řízení“, která například varuje řidiče před jakýmkoli vybočením ze zvoleného jízdního pruhu (systém „Lane Departure Warning“), koriguje úhel rejdu kol za účelem zabránění vybočení ze zvoleného jízdního pruhu (systém „Lane Departure Avoidance“) nebo koriguje úhel rejdu jednoho nebo více kol za účelem zlepšení dynamického chování či stability vozidla.
Vyspělý systém pro podporu řízení řidiči umožňuje kdykoli se rozhodnout podpůrnou funkci záměrným úkonem deaktivovat, např. za účelem vyhnutí se nepředvídanému objektu na vozovce.
Očekává se, že budoucí technologie umožní i řízení, které bude ovlivňováno či ovládáno čidly a signály vyvolávanými buď ve vozidle, nebo mimo něj. Tyto předpoklady způsobily vážné obavy ohledně odpovědnosti za primární ovládání vozidla a neexistence žádného mezinárodně dohodnutého protokolu pro přenos dat, pokud jde o ovládání řízení mimo vozidlo nebo externí ovládání řízení. Proto tento předpis nepovoluje udělení obecného schválení systémům, které mají zabudovány funkce, jež umožňují ovládání řízení pomocí vnějších signálů, např. signálů vysílaných naváděcími stanicemi na okraji vozovky či aktivními prvky vsazenými do povrchu vozovky. Systémy, které nevyžadují přítomnost řidiče, byly vymezeny jako „systémy autonomního řízení“.
Tento předpis rovněž nepřipouští udělování schválení systémům nuceného řízení přípojných vozidel elektrickým ovládáním z tažného vozidla, protože v současnosti neexistují žádné normy týkající se takového použití. Očekává se, že někdy v budoucnu bude změněna norma ISO 11992 tak, aby zahrnula hlášení související s převodem ovládacího orgánu řízení.
1. OBLAST PŮSOBNOSTI
1.1. Tento předpis se vztahuje na mechanismus řízení vozidel kategorií M, N a O (1).
1.2. Tento předpis se nevztahuje na:
|
1.2.1. |
mechanismus řízení s plně pneumatickým převodem; |
|
1.2.2. |
systémy autonomního řízení podle definice v bodě 2.3.3; |
|
1.2.3. |
systémy řízení, které vykonávají funkce definované jako ACSF kategorie B2, D nebo E podle bodů 2.3.4.1.3, 2.3.4.1.5 nebo 2.3.4.1.6, dokud pro ně nebudou do tohoto předpisu OSN zavedena zvláštní ustanovení. |
2. DEFINICE
Pro účely tohoto předpisu:
|
2.1. |
„schválením vozidla“ se rozumí schválení typu vozidla z hlediska jeho mechanismu řízení; |
|
2.2. |
„typem vozidla“ se rozumí vozidlo, které se neliší z hlediska označení typu vozidla výrobcem ani v podstatných vlastnostech jako:
|
|
2.3. |
„mechanismem řízení“ se rozumí celek zařízení, jehož účelem je určit směr pohybu vozidla. Mechanismus řízení sestává z těchto částí:
|
|
2.4. |
Parametry řízení
|
|
2.5. |
Druhy mechanismů řízení V závislosti na způsobu, kterým se vytvářejí řídicí síly, se rozlišují tyto druhy mechanismů řízení:
|
|
2.6. |
Druhy převodu řízení V závislosti na způsobu, kterým se přenášejí řídicí síly, se rozlišují tyto druhy převodu řízení:
|
|
2.7. |
„elektrickým ovládacím vedením“ se rozumí elektrické spojení, kterým se zajišťuje funkce ovládacího orgánu řízení přípojného vozidla. Zahrnuje elektrické vedení a konektor a obsahuje součásti zajišťující datovou komunikaci a přívod elektrické energie pro převod ovládání přípojného vozidla. |
3. ŽÁDOST O SCHVÁLENÍ
3.1. Žádost o schválení typu vozidla z hlediska mechanismu řízení předkládá výrobce vozidla nebo jeho řádně pověřený zástupce.
3.2. K žádosti musí být přiloženy následující dokumenty ve trojím vyhotovení a tyto údaje:
|
3.2.1. |
popis typu vozidla s ohledem na položky uvedené v bodě 2.2; musí být specifikován typ vozidla; |
|
3.2.2. |
stručný popis mechanismu řízení se schématem mechanismu řízení jako celku znázorňujícím umístění jednotlivých zařízení, jež ovlivňují řízení, ve vozidle; |
|
3.2.3. |
v případě systémů strojního řízení a systémů, kterých se týká příloha 6 tohoto předpisu, přehled systému, jenž znázorní jeho základní principy a bezpečnostní postupy, rezervy a výstražné systémy nezbytné pro zajištění bezpečného provozu vozidla. Potřebné technické záznamy týkající se těchto systémů musí být dány k dispozici pro jednání se schvalovacím orgánem a/nebo s technickou zkušebnou. Tyto záznamy budou projednány jako důvěrné. |
3.3. Technické zkušebně odpovědné za provádění schvalovacích zkoušek se předá vozidlo, jež představuje typ vozidla, který má být schválen.
4. SCHVÁLENÍ
4.1. Pokud vozidlo předané ke schválení podle tohoto předpisu splňuje všechny příslušné požadavky stanovené v tomto předpise, musí být schválení z hlediska mechanismu řízení takovému typu vozidla uděleno.
4.1.1. Před udělením schválení typu musí schvalovací orgán ověřit existenci vyhovujících opatření pro zajištění účinné kontroly shodnosti výroby, jak je stanoveno v bodě 7 tohoto předpisu.
4.2. Každému schválenému typu se přidělí číslo schválení. Jeho první dvě číslice (v současné době 02) udávají sérii změn, která zahrnuje nejnovější významné technické změny předpisu v době vydání schválení. Stejná smluvní strana nesmí toto číslo přidělit jinému typu vozidla nebo stejnému typu vozidla předaného ke schválení s mechanismem řízení odlišným od mechanismu řízení, který je popsán v dokladech vyžadovaných podle bodu 3.
4.3. Oznámení o schválení nebo o rozšíření či odmítnutí schválení typu vozidla podle tohoto předpisu se zašle stranám dohody z roku 1958, které uplatňují tento předpis, na formuláři podle vzoru v příloze 1 tohoto předpisu.
4.4. Na každém vozidle, které vyhovuje typu vozidla schválenému podle tohoto předpisu, se viditelně a na snadno přístupném místě uvedeném ve formuláři schválení umístí mezinárodní značka schválení, která se skládá z:
|
4.4.1. |
písmene „E“ v kružnici, za nímž následuje rozlišovací číslo země, která schválení udělila (3); |
|
4.4.2. |
čísla tohoto předpisu, za nímž následuje písmeno „R“, pomlčka a číslo schválení typu vpravo od kružnice předepsané v bodě 4.4.1. |
4.5. Vyhovuje-li vozidlo typu vozidla schválenému podle jednoho nebo více dalších předpisů připojených k dohodě v zemi, která schválení podle tohoto předpisu udělila, není třeba symbol předepsaný v bodě 4.4.1 opakovat; v takovém případě se čísla předpisů a čísla schválení a doplňkové symboly podle všech předpisů, podle nichž bylo uděleno schválení v zemi, která schválení podle tohoto předpisu udělila, umístí ve svislých sloupcích napravo od symbolu předepsaného v bodě 4.4.1.
4.6. Značka schválení musí být jasně čitelná a nesmazatelná.
4.7. Značka schválení se umístí v blízkosti štítku nebo přímo na štítek s údaji o vozidle, kterým vozidlo opatřil výrobce.
4.8. V příloze 2 tohoto předpisu jsou uvedeny příklady uspořádání značek schválení typu.
5. POŽADAVKY NA KONSTRUKCI
5.1. Obecná ustanovení
5.1.1. Systém řízení musí zajišťovat snadné a bezpečné ovládání vozidla až do jeho maximální konstrukční rychlosti nebo u přípojného vozidla do jeho technicky přípustné maximální rychlosti. Při zkoušce podle bodu 6.2 prováděné s mechanismem řízení v neporušeném stavu musí mít tento mechanismus tendenci k samostředění. Vozidlo musí splňovat požadavky bodu 6.2 u motorových vozidel a bodu 6.3 u přípojných vozidel. Je-li vozidlo vybaveno pomocným mechanismem řízení, musí též vyhovovat požadavkům přílohy 4. Přípojná vozidla s hydraulickými převody řízení musí splňovat také ustanovení přílohy 5.
5.1.2. Musí být možné jet na přímém úseku vozovky bez neobvyklých korekcí řízení řidičem a bez neobvyklých vibrací v systému řízení při maximální konstrukční rychlosti vozidla.
5.1.3. Směr působení na ovládací orgán řízení musí souhlasit se zamýšlenou změnou směru jízdy vozidla a musí existovat plynulý vztah mezi vychýlením ovládacího orgánu řízení a úhlem rejdu kol. Tyto požadavky se nevztahují na systémy s funkcí automatického nebo korektivního řízení, nebo na pomocné mechanismy řízení.
Tyto požadavky rovněž nemusí nutně platit pro strojní řízení, když vozidlo stojí, během manévrů při nízké rychlosti maximálně do 15 km/h a když není zapnuto napájení systému elektrickým proudem.
5.1.4. Mechanismus řízení musí být konstruován, vyroben a namontován takovým způsobem, aby byl schopen odolávat namáháním vznikajícím při normálním provozu vozidla nebo jízdní soupravy. Maximální úhel rejdu kol nesmí být omezen žádnou částí převodu řízení, není-li konstruována výslovně k tomuto účelu. Není-li stanoveno jinak, předpokládá se pro účely tohoto předpisu, že v mechanismu řízení nemůže nastat zároveň více než jedna porucha a že dvě nápravy na otočném podvozku s pomocným rámem se posuzují jako jedna náprava.
5.1.5. Působení mechanismu řízení včetně elektrických ovládacích vedení nesmí být nepříznivě ovlivňováno magnetickými či elektrickými poli. To je nutno prokázat splněním technických požadavků a přechodných ustanovení předpisu č. 10 uplatněním:
|
a) |
série změn 03 pro vozidla bez propojovacího systému pro nabíjení dobíjecího systému pro uchovávání energie (trakčních baterií); |
|
b) |
série změn 04 pro vozidla s propojovacím systémem pro nabíjení dobíjecího systému pro uchovávání energie (trakčních baterií). |
5.1.6. Vyspělé systémy pro podporu řízení musí být schváleny v souladu s tímto předpisem pouze tehdy, pokud jejich funkce nezpůsobuje žádné zhoršení účinnosti základního systému řízení. Kromě toho musí být konstruovány tak, aby měl řidič možnost kdykoli a záměrným úkonem tuto funkci deaktivovat.
5.1.6.1. Pro systém s funkcí korektivního řízení platí požadavky přílohy 6.
5.1.6.1.1. Každý zásah funkce korektivního řízení musí být řidiči okamžitě signalizován optickým výstražným signálem, který musí být ukazován po dobu nejméně 1 s, nebo tak dlouho, dokud zásah trvá, podle toho, která z těchto dob je delší.
V případě zásahu funkce korektivního řízení, který je řízen elektronickým řízením stability (ESC), nebo stabilitní funkcí vozidla, specifikovanou v příslušném předpisu OSN (např. v předpisech OSN č. 13, 13-H nebo 140), se může použít blikající kontrolka, která signalizuje zásahy ESC, po dobu, po kterou zásah trvá, jako alternativa k výše specifikovanému optickému výstražnému signálu.
5.1.6.1.2. V případě, kdy zásah funkce korektivního řízení vychází z vyhodnocení přítomnosti a umístění značení jízdního pruhu nebo jeho ohraničení, platí navíc následující ustanovení:
|
5.1.6.1.2.1. |
V případě zásahu trvajícího déle než:
musí být v činnosti akustický výstražný signál trvající až do konce zásahu. |
|
5.1.6.1.2.2. |
V případě dvou nebo více po sobě následujících zásahů v intervalu jízdy trvajícím 180 sekund a pokud v průběhu zásahu nedojde k žádnému působení řidiče na řízení, musí systém v průběhu druhého zásahu a všech dalších zásahů v intervalu jízdy trvajícím 180 sekund uvést v činnost akustický výstražný signál. Počínaje třetím zásahem (a následujícími zásahy) musí akustický výstražný signál trvat nejméně o 10 sekund déle než předchozí výstražný signál. |
5.1.6.1.3. Ovládací síla řízení potřebná k překonání směrového řízení vykonávaného systémem nesmí být pro žádnou z činností funkce korektivního řízení vyšší než 50 N.
5.1.6.1.4. Požadavky na funkci korektivního řízení uvedené v bodech 5.1.6.1.1, 5.1.6.1.2 a 5.1.6.1.3, které se týkají vyhodnocování přítomnosti a umístění značení jízdního pruhu nebo jeho ohraničení, se musí přezkoušet podle příslušné zkoušky (příslušných zkoušek) vozidla stanovené (stanovených) v příloze 8 tohoto předpisu.
5.1.6.2. Vozidla vybavená funkcí nouzového řízení musí splňovat následující požadavky.
Pro systém s funkcí nouzového řízení platí požadavky přílohy 6.
5.1.6.2.1. Funkce nouzového řízení smí začít zasahovat jen v případě zjištění rizika kolize.
5.1.6.2.2. Každé vozidlo vybavené funkcí nouzového řízení musí být podle daného případu použití vybaveno prostředky k monitorování okolí, ve kterém se pohybuje (např. značení jízdního pruhu, okraj vozovky, ostatní účastníci silničního provozu). Tyto prostředky musí monitorovat okolí, ve kterém se vozidlo pohybuje, vždy když je funkce nouzového řízení aktivní.
5.1.6.2.3. Automatický vyhýbací manévr iniciovaný funkcí nouzového řízení nesmí vést k tomu, aby vozidlo vyjelo z vozovky.
5.1.6.2.3.1. V případě zásahu funkce nouzového řízení na vozovce nebo v jízdním pruhu se značením na jedné straně nebo na obou stranách nesmí automatický vyhýbací manévr iniciovaný funkcí nouzového řízení vést k tomu, aby vozidlo překročilo značení jízdního pruhu. Avšak jestliže zásah začne v průběhu změny jízdního pruhu vykonávané řidičem, nebo během nezamýšleného posouvání se do sousedního jízdního pruhu, může systém řídit vozidlo zpět do původního jízdního pruhu, ve kterém vozidlo jelo.
5.1.6.2.3.2. Není-li na jedné straně nebo na obou stranách vozidla žádné značení jízdního pruhu, je povolen jediný zásah funkce nouzového řízení za podmínky, že vlivem tohoto zásahu nedojde k bočnímu vychýlení vozidla většímu než 0,75 m ve směru, kde není žádné značení jízdního pruhu. Boční vychýlení během automatického vyhýbacího manévru se určí s použitím pevně stanoveného bodu na přídi vozidla na začátku a na konci zásahu funkce nouzového řízení.
5.1.6.2.4. Zásah funkce nouzového řízení nesmí vést k tomu, aby se vozidlo dostalo do kolize s jiným účastníkem silničního provozu (4).
5.1.6.2.5. Výrobce musí v průběhu schvalování typu k uspokojení technické zkušebny prokázat, jakými prostředky k monitorování okolí, ve kterém se pohybuje, je vozidlo vybaveno, aby splňovalo ustanovení v podbodech výše uvedeného bodu 5.1.6.2.
5.1.6.2.6. Každý zásah funkce nouzového řízení musí být řidiči signalizován optickým výstražným signálem a též akustickým nebo haptickým výstražným signálem nejpozději na začátku zásahu funkce nouzového řízení.
K tomuto účelu se vhodné signály používané jinými výstražnými systémy (např. detekce slepého místa, výstraha před vybočením z jízdního pruhu, výstraha před čelní kolizí) považují ke splnění výše uvedených požadavků na příslušné optické, akustické nebo haptické signály za postačující.
5.1.6.2.7. Porucha systému musí být řidiči signalizována optickým výstražným signálem. Je-li však systém ručně deaktivován, může být signalizace režimu poruchy potlačena.
5.1.6.2.8. Ovládací síla řízení potřebná k překonání směrového řízení vykonávaného systémem nesmí být vyšší než 50 N.
5.1.6.2.9. S vozidlem se musí vykonat příslušné zkoušky vozidla v souladu s přílohou 8 tohoto předpisu OSN.
5.1.6.2.10. Informační údaje o systému
Technické zkušebně musí být v době schvalování typu předloženy následující údaje, zároveň se složkou dokumentace požadovanou podle přílohy 6 tohoto předpisu OSN:
|
a) |
případ (případy) použití, v nichž je funkce nouzového řízení určena k činnosti (viz případy použití podle bodů i), ii), iii) písmene a) a podle písmene b), které jsou specifikovány v definici funkce nouzového řízení v bodě 2.3.4.3); |
|
b) |
podmínky, za nichž je systém aktivní, např. rozsah rychlosti vozidla Vsmax, Vsmin; |
|
c) |
jak funkce nouzového řízení zjišťuje riziko kolize; |
|
d) |
popis prostředků k monitorování okolí, ve kterém se vozidlo pohybuje; |
|
e) |
způsob deaktivace funkce a jejího opětovného uvedení v činnost; |
|
f) |
jak je zajištěno, že síla potřebná k překonání systému nepřekročí mezní hodnotu 50 N. |
5.1.7. Tažná vozidla vybavená přípojkou k přívodu elektrické energie do systému řízení přípojného vozidla a přípojná vozidla, která používají elektrickou energii z tažného vozidla k napájení systému řízení přípojného vozidla, musí splňovat příslušná ustanovení přílohy 7.
5.1.8. Převod řízení
5.1.8.1. Zařízení k seřízení geometrie řízení musí být taková, aby po seřízení mohlo být mezi seřiditelnými součástmi zajištěno tvarové spojení pomocí vhodných zajišťovacích zařízení.
5.1.8.2. Převod řízení, který může být rozpojen, aby umožňoval různé konfigurace vozidla (např. u roztažitelných návěsů), musí mít zajišťovací zařízení, která zajišťují uvedení jednotlivých součástí do tvarově správné polohy; je-li zajištění automatické, musí zde být přídavná ručně ovládaná bezpečnostní pojistka.
5.1.9. Řízená kola
Zadní kola nesmějí být jedinými řízenými koly. Tento požadavek se nevztahuje na návěsy.
5.1.10. Přívod energie
Tentýž přívod energie smí být použit pro mechanismus řízení i ostatní systémy. V případě poruchy v jakémkoli systému, který sdílí tentýž přívod energie, však musí být řízení zajištěno v souladu s příslušnými podmínkami pro případ poruchy uvedenými v bodě 5.3.
5.1.11. Řídicí systémy
Požadavky přílohy 6 se vztahují na bezpečnostní hlediska elektronických řídicích systémů vozidel, jež zajišťují převod ovládání funkce řízení nebo jsou jeho součástí, včetně vyspělých systémů pro podporu řízení. Na systémy či funkce, které využívají systému řízení jako prostředku pro dosahování požadovaných účinků vyšší úrovně, se však příloha 6 vztahuje pouze v případě, že mají na systém řízení přímý vliv. Je-li vozidlo takovými systémy vybaveno, nesmějí být během zkoušek systému řízení pro schválení typu deaktivovány.
5.2. Zvláštní požadavky na přípojná vozidla
5.2.1. Přípojná vozidla (s výjimkou návěsů a přívěsů s nápravami uprostřed), která mají více než jednu nápravu s řízenými koly, a návěsy a přívěsy s nápravami uprostřed, které mají alespoň jednu nápravu s řízenými koly, musí splňovat podmínky stanovené v bodě 6.3. U přípojných vozidel se samořízeným mechanismem řízení však zkouška podle bodu 6.3 není nutná, jestliže se poměr zatížení náprav mezi neřízenými a samořízenými nápravami rovná hodnotě 1,6 nebo je vyšší, a to za všech podmínek naložení vozidla.
U přípojných vozidel se samořízeným mechanismem řízení se však poměr zatížení náprav mezi neřízenými či řízenými kloubovými nápravami a vlečenými nápravami za všech podmínek naložení vozidla musí rovnat nejméně hodnotě 1.
5.2.2. Při jízdě tažného vozidla jízdní soupravy v přímém směru musí být přípojné a tažné vozidlo v zákrytu. Není-li zákryt udržován automaticky, musí být přípojné vozidlo vybaveno vhodným regulačním zařízením pro udržování zákrytu.
5.3. Ustanovení týkající se poruch a účinnosti
5.3.1. Obecně
5.3.1.1. Pro účely tohoto předpisu se řízená kola, ovládací orgán řízení a všechny mechanické části převodu řízení nepovažují za náchylné k poruše, pokud jsou dostatečně dimenzovány, snadno přístupné pro údržbu a jejich bezpečnostní charakteristiky jsou minimálně na stejné úrovni jako charakteristiky předepsané pro jiné podstatné části vozidla (např. brzdový systém). V případech, kdy by porucha jakékoli takové části mohla vést ke ztrátě kontroly nad vozidlem, musí být taková část vyrobena z kovu nebo z materiálu s rovnocennými vlastnostmi a nesmí vykazovat znatelné deformace při normálním provozu mechanismu řízení.
5.3.1.2. Požadavky bodů 5.1.2, 5.1.3 a 6.2.1 musí být splněny i v případě poruchy v mechanismu řízení, pokud je vozidlo schopno jet rychlostmi požadovanými v příslušných bodech.
V takovém případě se bod 5.1.3 nevztahuje na systémy strojního řízení, když vozidlo stojí.
5.3.1.3. Řidič vozidla musí být jasně upozorněn na veškeré případné poruchy v převodu jiné než čistě mechanické povahy, jak je stanoveno v bodě 5.4. Nastane-li porucha, je přípustná změna průměrného převodového poměru řízení, není-li překročena ovládací síla uvedená v bodě 6.2.6.
5.3.1.4. V případě, kdy brzdový systém vozidla využívá tentýž zdroj energie jako systém řízení a tento zdroj energie selže, musí mít systém řízení přednost a musí být schopen splnit požadavky bodů 5.3.2, resp. 5.3.3. Brzdný účinek při prvním následném použití brzd navíc nesmí klesnout pod předepsaný účinek provozní brzdy, jak je uvedeno v bodě 2 přílohy 3 tohoto předpisu.
5.3.1.5. V případě, kdy brzdový systém vozidla využívá tentýž přívod energie jako systém řízení a v přívodu energie dojde k poruše, musí mít systém řízení přednost a musí být schopen splnit požadavky bodů 5.3.2, resp. 5.3.3. Brzdný účinek při prvním následném použití brzd navíc musí být v souladu s ustanovením bodu 3 přílohy 3 tohoto předpisu.
5.3.1.6. Požadavky na brzdný účinek stanovené v bodech 5.3.1.4 a 5.3.1.5 neplatí, jestliže je brzdový systém takový, že když není k dispozici žádná zásoba energie, je možno působením na ovládací orgán provozního brzdění splnit bezpečnostní požadavek na systém nouzového brzdění uvedený v:
|
a) |
bodě 2.2 přílohy 3 předpisu OSN č. 13-H (pro vozidla M1 a N1); |
|
b) |
bodě 2.2 přílohy 4 předpisu OSN č. 13 (pro vozidla M2, M3 a N). |
5.3.1.7. U přípojných vozidel musí být požadavky bodů 5.2.2 a 6.3.4.1 splněny i v případě poruchy v systému řízení.
5.3.2. Systémy řízení s posilovačem
5.3.2.1. V případě vypnutí motoru nebo selhání části převodu, s výjimkou částí uvedených v bodě 5.3.1.1, nesmí dojít k žádným okamžitým změnám úhlu rejdu kol. Je-li vozidlo schopno jet rychlostí vyšší než 10 km/h, musí být splněny požadavky stanovené v bodě 6, jež se týkají systému v případě poruchy.
5.3.3. Systémy strojního řízení
5.3.3.1. Systém musí být konstruován tak, aby vozidlo nemohlo jet rychlostí vyšší než 10 km/h po neurčitou dobu, jestliže došlo k poruše, která vyžaduje spuštění výstražného signálu podle bodu 5.4.2.1.1.
5.3.3.2. V případě poruchy v rámci převodu ovládání, s výjimkou částí uvedených v bodě 5.1.4, musí být možné řídit vozidlo s účinností stanovenou v bodě 6 pro neporušený systém řízení.
5.3.3.3. V případě poruchy zdroje energie převodu ovládání musí být možné provést nejméně 24 manévrů ve tvaru „osmičky“ při průměru každé smyčky 40 m a rychlosti 10 km/h a při úrovni účinnosti stanovené pro neporušený systém v bodě 6. Zkušební manévry musí být zahájeny při hladině energie v zásobníku stanovené v bodě 5.3.3.5.
5.3.3.4. V případě poruchy v rámci převodu energie, s výjimkou částí uvedených v bodě 5.3.1.1, nesmí dojít k žádným okamžitým změnám úhlu rejdu kol. Je-li vozidlo schopno jet rychlostí vyšší než 10 km/h, musí být požadavky bodu 6, jež se týkají systému v případě poruchy, splněny po dokončení nejméně 25 manévrů ve tvaru „osmičky“ při minimální rychlosti 10 km/h a při průměru každé smyčky 40 m.
Zkušební manévry musí být zahájeny při hladině energie v zásobníku stanovené v bodě 5.3.3.5.
5.3.3.5. Hladinou energie, která se použije pro zkoušky podle bodů 5.3.3.3 a 5.3.3.4, musí být hladina energie v zásobníku, při které je řidiči signalizována porucha.
U systémů s elektrickým pohonem, na které se vztahuje příloha 6, musí tato hladina představovat nejnepříznivější případ, který zmiňuje výrobce v dokumentaci předané v souvislosti s požadavky přílohy 6, a musí zohledňovat vlivy např. teploty a stárnutí na výkonnost baterie.
5.4. Výstražné signály
5.4.1. Obecná ustanovení
5.4.1.1. Jakákoli porucha, která zhoršuje funkci řízení a není mechanické povahy, musí být řidiči vozidla zřetelně signalizována.
Navzdory požadavkům bodu 5.1.2 lze záměrně vyvolané vibrace v systému řízení využít jako doplňkové signalizace poruchového stavu v tomto systému.
U motorového vozidla se za výstražný signál považuje zvětšení ovládací síly řízení; u přípojného vozidla je přípustný mechanický indikátor.
5.4.1.2. Optické výstražné signály musí být viditelné i za denního světla a rozlišitelné od ostatních výstrah; musí být možné, aby si řidič ze svého sedadla snadno ověřil, zda signalizační zařízení fungují správně; porucha součásti výstražných zařízení nesmí mít za následek žádnou ztrátu vlastností systému řízení.
5.4.1.3. Akustické výstražné signály musí být nepřetržitým nebo přerušovaným zvukovým signálem nebo hlasovou informací. V případě hlasové informace musí výrobce zajistit, aby hlas hovořil jazykem (jazyky) trhu, na kterém je vozidlo prodáváno.
Akustické výstražné signály musí řidič snadno rozpoznat.
5.4.1.4. Je-li tentýž zdroj energie využíván pro systém řízení i ostatní systémy, musí být řidič upozorněn akustickým nebo optickým výstražným signálem, když hladina naakumulované energie/kapaliny v zásobníku energie/zásobní nádržce poklesne na úroveň, která může způsobit zvětšení ovládací síly řízení. Tento výstražný signál může být kombinován se zařízením, které signalizuje poruchu brzd, jestliže brzdový systém využívá téhož zdroje energie. Musí být možné, aby si řidič snadno ověřil, zda výstražné zařízení funguje správně.
5.4.2. Zvláštní požadavky na mechanismus strojního řízení
5.4.2.1. Motorová vozidla musí být schopna dávat výstražné signály v případě poruch a závad řízení takto:
|
5.4.2.1.1. |
červený výstražný signál, který upozorňuje na poruchy v rámci hlavního mechanismu řízení definované v bodě 5.3.1.3; |
|
5.4.2.1.2. |
případně žlutý výstražný signál, který upozorňuje na elektricky zjištěné závady v rámci mechanismu řízení, na které neupozorňuje červený výstražný signál; |
|
5.4.2.1.3. |
je-li použit symbol, musí odpovídat symbolu J 04, ISO/IEC registrační číslo 7000-2441 podle definice v ISO 2575:2000; |
|
5.4.2.1.4. |
výše uvedený výstražný signál (výše uvedené výstražné signály) se musí rozsvítit, když je elektrické zařízení vozidla (a systém řízení) pod napětím. U stojícího vozidla musí systém řízení ověřit, že se nevyskytuje žádná specifikovaná porucha nebo závada, dříve než signál zhasne. Specifikované poruchy nebo závady, které by měly aktivovat výše uvedený výstražný signál, avšak které se nezjistí u stojícího vozidla, se musí v okamžiku zjištění uložit a zobrazit se při nastartování a vždy, když je spínač zapalování (startování) v poloze „zapnuto“ (běh motoru), po celou dobu trvání poruchy. |
5.4.3. Pokud je v činnosti přídavný mechanismus řízení a/nebo pokud se úhel rejdu kol vyvolaný tímto mechanismem nevrátil do běžné pozice při jízdě, musí být řidič upozorněn výstražným signálem.
5.5. Požadavky na pravidelnou technickou kontrolu mechanismu řízení
5.5.1. Je-li to proveditelné, a za předpokladu dohody mezi výrobcem vozidla a schvalovacím orgánem, musí být mechanismus řízení a jeho montáž konstruovány tak, aby bylo bez rozebrání mechanismu možné provést kontrolu jeho činnosti, bude-li to nezbytné, pomocí běžně používaných měřicích přístrojů, metod či zkušebního zařízení.
5.5.2. Musí být možné jednoduchým způsobem ověřit správný provozní stav těch elektronických systémů, které ovládají řízení. Je-li zapotřebí zvláštních informací, musí k nim být zajištěn volný přístup.
5.5.2.1. V průběhu schvalování typu musí být předána důvěrná informace o zavedených prostředcích ochrany proti jednoduché neoprávněné změně funkce kontrolních prostředků zvolených výrobcem (např. výstražný signál).
Alternativně je tento požadavek na ochranu splněn tím, že je k dispozici další prostředek ke kontrole řádného provozního stavu.
5.6. Požadavky na ACSF
Pro ACSF platí požadavky přílohy 6.
5.6.1. Zvláštní požadavky na ACSF kategorie A
ACSF kategorie A musí splňovat následující požadavky.
5.6.1.1. Obecně
5.6.1.1.1. Systém smí být v činnosti jen do rychlosti 10 km/h (s povolenou odchylkou +2 km/h).
5.6.1.1.2. Systém smí být v režimu činnosti jen po záměrném úkonu řidiče a jestliže jsou splněny podmínky pro činnost systému (všechny související funkce pracují správně – např. brzdy, akcelerátor, řízení, kamera/radar/laserový radiolokátor atd.).
5.6.1.1.3. Musí být možné, aby řidič mohl systém kdykoli deaktivovat.
5.6.1.1.4. V případě, kdy je součástí systému akcelerátor a/nebo ovládání brzd vozidla, musí být vozidlo vybaveno prostředkem ke zjištění překážky v manévrovacím prostoru (např. vozidla, chodec) a k okamžitému zastavení vozidla, aby nedošlo ke kolizi (5).
5.6.1.1.5. Kdykoli vstoupí systém v činnost, musí to být řidiči signalizováno. Při každém ukončení této funkce musí být řidič upozorněn krátkým, ale zřetelným výstražným znamením v podobě optického výstražného signálu a buď akustického výstražného signálu, nebo haptického výstražného signálu (s výjimkou signálu na ovládacím orgánu řízení při parkování).
U dálkově ovládaného parkování musí být splněny požadavky na výstrahu řidiči, uvedené výše, optickým výstražným signálem nejméně na dálkovém ovládači.
5.6.1.2. Doplňkové požadavky na dálkově ovládané parkování
5.6.1.2.1. Parkovací manévr musí být iniciován řidičem, avšak řízen systémem. Přímé ovlivnění úhlu rejdu kol, zrychlení a zpomalení vozidla prostřednictvím dálkového ovládače nesmí být možné.
5.6.1.2.2. V průběhu parkovacího manévru se požaduje trvalé působení řidiče na dálkový ovládač.
5.6.1.2.3. Jestliže se trvalé působení na dálkový ovládač přeruší nebo vzdálenost mezi vozidlem a dálkovým ovládačem překročí stanovený maximální provozní dosah dálkově ovládaného parkování (SRCPmax) nebo se ztratí signál mezi dálkovým ovládačem a vozidlem, musí se vozidlo okamžitě zastavit.
5.6.1.2.4. Jestliže se v průběhu parkovacího manévru otevřou některé dveře vozidla nebo víko prostoru pro zavazadla, musí se vozidlo okamžitě zastavit.
5.6.1.2.5. Jestliže vozidlo dosáhne své konečné polohy parkování buď automaticky, nebo na základě potvrzení řidičem, a spínač startování je v poloze „vypnuto“, musí automaticky vstoupit v činnost systém parkovacího brzdění.
5.6.1.2.6. Kdykoli se vozidlo v průběhu parkovacího manévru zastaví, musí funkce dálkově ovládaného parkování zabránit tomu, aby vozidlo poodjelo dále.
5.6.1.2.7. Stanovený maximální provozní dosah dálkově ovládaného parkování nesmí překročit 6 m.
5.6.1.2.8. Systém musí být konstruován tak, aby byl chráněn proti neoprávněnému uvedení v činnost nebo proti činnosti systémů dálkově ovládaného parkování a zásahům do systému.
5.6.1.3. Informační údaje o systému
5.6.1.3.1. Technické zkušebně musí být v době schvalování typu předloženy následující údaje, zároveň se složkou dokumentace požadovanou podle přílohy 6 tohoto předpisu:
|
5.6.1.3.1.1. |
hodnota stanoveného maximálního provozního dosahu dálkově ovládaného parkování (SRCPmax); |
|
5.6.1.3.1.2. |
podmínky, za nichž může být systém uveden v činnost, tj. když jsou splněny podmínky pro činnost systému; |
|
5.6.1.3.1.3. |
výrobce systémů dálkově ovládaného parkování poskytne technickým orgánům vysvětlení, jak je systém chráněn proti neoprávněnému uvedení v činnost. |
5.6.2. Zvláštní požadavky na ACSF kategorie B1
ACSF kategorie B1 musí splňovat následující požadavky.
5.6.2.1. Obecně
5.6.2.1.1. Systém v činnosti musí v rámci mezních podmínek kdykoli zajišťovat, aby vozidlo nepřekročilo značení jízdního pruhu, jestliže má boční zrychlení nižší, než je maximální boční zrychlení (aysmax), stanovené výrobcem vozidla.
Systém může překročit stanovenou hodnotu aysmax o nejvýše 0,3 m/s2 a přitom nepřekročit maximální hodnotu stanovenou v tabulce v bodě 5.6.2.1.3 tohoto předpisu.
5.6.2.1.2. Vozidlo musí být vybaveno zařízením, kterým řidič uvede systém v činnost (pohotovostní režim) a systém deaktivuje (režim mimo činnost). Deaktivace systému musí být možná kdykoli jediným úkonem řidiče. Po tomto úkonu smí systém opět vstoupit v činnost jen po záměrném úkonu řidiče.
5.6.2.1.3. Systém musí být konstruován tak, aby byly potlačeny nadměrné zásahy do řízení vozidla, a bylo tak zajištěno ovládání řízení řidičem a zabráněno neočekávanému chování vozidla během provozu. Aby se to zajistilo, musí být splněny následující požadavky:
|
a) |
Ovládací síla řízení potřebná k překonání směrového řízení vykonávaného systémem nesmí být vyšší než 50 N; |
|
b) |
Stanovené maximální boční zrychlení aysmax musí být v mezích uvedených v následující tabulce: Tabulka 1
|
||||||||||||||||||||||||||||||||||||||||
|
c) |
Klouzavý průměr bočního trhnutí způsobeného systémem o trvání 0,5 s nesmí překročit 5 m/s3. |
5.6.2.1.4. Požadavky uvedené v bodech 5.6.2.1.1 a 5.6.2.1.3 tohoto předpisu se musí přezkoušet podle příslušné zkoušky (příslušných zkoušek) vozidla stanovené (stanovených) v příloze 8 tohoto předpisu.
5.6.2.2. Činnost ACSF kategorie B1
5.6.2.2.1. Je-li systém v činnosti, musí být řidiči dáván optický signál.
5.6.2.2.2. Je-li systém v pohotovostním režimu, musí být řidiči dáván optický signál.
5.6.2.2.3. Pokud systém dosáhne svých mezních podmínek stanovených v bodě 5.6.2.3.1.1 tohoto předpisu (např. stanovené maximální boční zrychlení aysmax) a nedojde k žádnému působení řidiče na ovládací orgán řízení a zároveň některé přední kolo vozidla začne překračovat značení jízdního pruhu, musí systém pokračovat v podpoře řidiče a jasně ho informovat o tomto stavu systému optickým výstražným signálem a navíc ještě zvukovým nebo haptickým výstražným signálem.
U vozidel kategorií M2, M3, N2 a N3 se požadavek na výstrahu pokládá za splněný, jestliže je vozidlo vybaveno systémem výstrahy před vybočením z jízdního pruhu (systémem „Lane Departure Warning“) splňujícím technické požadavky předpisu OSN č. 130.
5.6.2.2.4. Porucha systému musí být řidiči signalizována optickým výstražným signálem. Je-li však systém ručně deaktivován řidičem, může být signalizace poruchy potlačena.
5.6.2.2.5. Když je systém v činnosti a při rozsahu rychlosti vozidla mezi 10 km/h, resp. V smin , podle toho, která z nich je vyšší, a V smax , musí mít systém prostředek ke zjištění, zda řidič drží ovládací orgán řízení.
Pokud řidič nedrží ovládací orgán řízení po uplynutí nejvýše 15 sekund, musí být vydán optický výstražný signál. Tento signál může být tentýž, jako je signál specifikovaný níže v tomto bodě.
Optický výstražný signál musí řidiči signalizovat, aby položil ruce na ovládací orgán řízení. Musí se jednat o obrázek zobrazující ruce a ovládací orgán řízení, k němuž může být připojen doplňkový vysvětlující text nebo výstražné symboly – viz následující příklady:
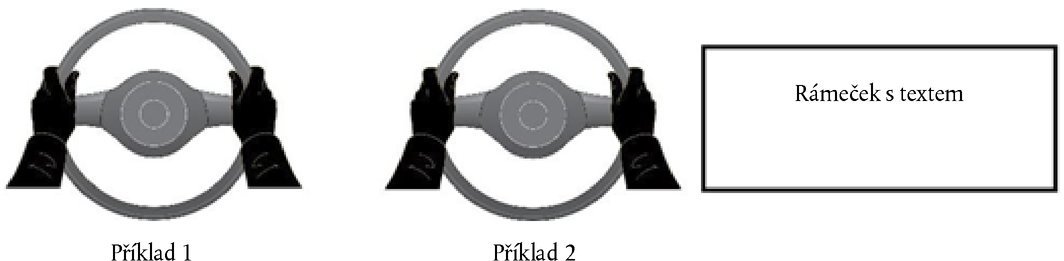
Rámeček s textem
Příklad 2
Příklad 1
Pokud řidič nedrží ovládací orgán řízení po uplynutí nejvýše 30 sekund, musí být alespoň ruce nebo ovládací orgán řízení v upozornění v podobě obrázku, které bylo vydáno jako optický výstražný signál, ukázány v červené barvě a musí být vydán zvukový výstražný signál.
Výstražné signály musí být v činnosti až do doby, než řidič opět drží ovládací orgán řízení, nebo dokud nedojde k deaktivaci systému buď ručně, nebo automaticky.
Systém musí být automaticky deaktivován nejpozději do 30 sekund od okamžiku, kdy se spustil zvukový výstražný signál. Po deaktivaci musí systém jasně informovat řidiče o stavu systému zvukovým nouzovým signálem, který se liší od předchozího zvukového výstražného signálu, po dobu nejméně pěti sekund, nebo do doby, než řidič opět drží ovládací orgán řízení.
Výše uvedené požadavky se musí přezkoušet podle příslušné zkoušky (příslušných zkoušek) vozidla stanovené (stanovených) v příloze 8 tohoto předpisu.
5.6.2.2.6. Pokud není stanoveno jinak, musí být optické signály popsané v bodě 5.6.2.2 navzájem rozdílné (např. rozdílný symbol, barva, blikání, text).
5.6.2.3. Informační údaje o systému
5.6.2.3.1. Technické zkušebně musí být v době schvalování typu předloženy následující údaje, zároveň se složkou dokumentace požadovanou podle přílohy 6 tohoto předpisu:
5.6.2.3.1.1. podmínky, za nichž může být systém uveden v činnost, a mezní hodnoty pro jeho činnost (mezní podmínky). Výrobce vozidla musí poskytnout hodnoty pro Vsmax, Vsmin a aysmax pro každý z rozsahů rychlostí uvedených v tabulce v bodě 5.6.2.1.3 tohoto předpisu;
5.6.2.3.1.2. informace o tom, jak systém zjišťuje, zda řidič drží ovládací orgán řízení.
5.6.3. (Rezervováno pro ACSF kategorie B2)
5.6.4. Zvláštní požadavky na ACSF kategorie C
Vozidla vybavená ACSF kategorie C musí splňovat následující požadavky.
5.6.4.1. Obecně
5.6.4.1.1. Vozidlo vybavené ACSF kategorie C musí být vybaveno také ACSF kategorie B1, která splňuje požadavky tohoto předpisu OSN.
5.6.4.1.2. Je-li ACSF kategorie C uvedena v činnost (pohotovostní režim), musí ACSF kategorie B1 vést vozidlo ve střednici jízdního pruhu.
To musí být prokázáno technické zkušebně v průběhu schvalování typu.
5.6.4.2. Uvedení v činnost/deaktivace ACSF kategorie C
5.6.4.2.1. Výchozím stavem systému musí být vypnutí na začátku každého nového cyklu startování/běhu motoru.
Tento požadavek neplatí, když je nový cyklus startování/běhu motoru vykonán automaticky, např. při činnosti systému stop/start.
5.6.4.2.2. Vozidlo musí být vybaveno zařízením, kterým řidič uvede systém v činnost (pohotovostní režim) a kterým ho deaktivuje (režim mimo činnost). Může být použit tentýž prostředek jako pro ACSF kategorie B1.
5.6.4.2.3. Systém smí být uveden v činnost (pohotovostní režim) jen záměrným úkonem řidiče.
Uvedení v činnost řidičem smí být možné jen na vozovkách, jejichž užívání je zakázáno chodcům a cyklistům a které jsou svým provedením vybaveny fyzickým oddělením, jež rozděluje provoz v opačných směrech, a které mají nejméně dva jízdní pruhy ve směru jízdy vozidel. Tyto podmínky musí být zajištěny nejméně dvěma na sobě nezávislými prostředky.
V případě přejezdu z typu vozovky, na kterém je použití ACSF kategorie C povoleno, na typ vozovky, na kterém použití ACSF kategorie C povoleno není, se systém musí automaticky deaktivovat.
5.6.4.2.4. Deaktivace systému (režim mimo činnost) musí být možná kdykoli jediným úkonem řidiče. Po tomto úkonu smí být systém opět uveden v činnost (pohotovostní režim) jen záměrným úkonem řidiče.
5.6.4.2.5. Bez ohledu na výše uvedené požadavky musí být možné provést odpovídající zkoušky podle přílohy 8 tohoto předpisu OSN na zkušební dráze.
5.6.4.3. Překonání systému
Působení řidiče na řízení musí překonat řídicí činnost vykonávanou systémem. Ovládací síla řízení potřebná k překonání směrového řízení vykonávaného systémem nesmí být vyšší než 50 N.
Systém může zůstat v činnosti (pohotovostní režim) za podmínky, že řidič má v průběhu překonávání systému přednost.
5.6.4.4. Boční zrychlení
Boční zrychlení vyvozené systémem v průběhu manévru změny jízdního pruhu:
|
a) |
nesmí překročit 1 m/s2 navíc k bočnímu zrychlení způsobenému zakřivením jízdního pruhu a |
|
b) |
nesmí způsobit, aby celkové boční zrychlení vozidla překročilo maximální hodnoty stanovené v tabulkách výše uvedeného bodu 5.6.2.1.3. |
Klouzavý průměr bočního trhnutí způsobeného systémem o trvání 0,5 s nesmí překročit 5 m/s3.
5.6.4.5. Rozhraní člověk-stroj (HMI)
5.6.4.5.1. Pokud není stanoveno jinak, musí být optické signály popsané v bodě 5.6.4.5 od sebe snadno rozlišitelné (např. rozdílný symbol, barva, blikání, text).
5.6.4.5.2. Je-li systém v pohotovostním režimu (tj. je připraven zasáhnout), musí být řidiči dáván optický signál.
5.6.4.5.3. Pokud probíhá procedura změny jízdního pruhu, musí o tom být řidiči dáván optický signál.
5.6.4.5.4. Je-li procedura změny jízdního pruhu v souladu s bodem 5.6.4.6.8 potlačena, musí systém jasně informovat řidiče o tomto stavu systému optickým výstražným signálem a navíc ještě zvukovým nebo haptickým výstražným signálem. Pokud je potlačení iniciováno řidičem, je postačující optický výstražný signál.
5.6.4.5.5. Porucha systému musí být řidiči okamžitě signalizována optickým výstražným signálem. Je-li však systém ručně deaktivován řidičem, může být signalizace režimu poruchy potlačena.
Pokud k poruše systému dojde v průběhu manévru změny jízdního pruhu, musí být porucha signalizována řidiči optickým a zvukovým nebo haptickým výstražným signálem.
5.6.4.5.6. Systém musí mít prostředek ke zjištění, zda řidič drží ovládací orgán řízení, a musí řidiče varovat v souladu s touto výstražnou strategií:
Pokud řidič nedrží ovládací orgán řízení po uplynutí nejvýše 3 sekund od iniciování procedury změny jízdního pruhu, musí být vydán optický výstražný signál. Tento signál musí být tentýž, jako je signál specifikovaný výše v bodě 5.6.2.2.5.
Výstražný signál musí být v činnosti až do doby, než řidič opět drží ovládací orgán řízení, nebo dokud nedojde k deaktivaci systému buď ručně, nebo automaticky.
5.6.4.6. Procedura změny jízdního pruhu
5.6.4.6.1. Iniciování procedury změny jízdního pruhu funkcí ACSF kategorie C smí být možné jen tehdy, když je funkce ACSF kategorie B1 už aktivní.
5.6.4.6.2. Procedura změny jízdního pruhu vyžaduje, aby řidič ručně uvedl v činnost ukazatel směru na straně odpovídající změně jízdního pruhu, po čemž musí procedura bezprostředně začít.
5.6.4.6.3. Při zahájení procedury změny jízdního pruhu musí být funkce ACSF kategorie B1 přerušena a jí vykonávaná funkce pro udržování vozidla v jízdním pruhu musí být až do okamžiku, než začne manévr změny jízdního pruhu, převzata funkcí ACSF kategorie C.
5.6.4.6.4. Boční pohyb vozidla k zamýšlenému jízdnímu pruhu nesmí začít dříve než 1 sekundu po zahájení procedury změny jízdního pruhu. Kromě toho musí být boční pohyb k přiblížení se značení jízdního pruhu a boční pohyb potřebný k uskutečnění manévru změny jízdního pruhu vykonány jako jediný plynulý pohyb.
Manévr změny jízdního pruhu musí být iniciován nejdříve 3,0 sekundy a nejpozději 5,0 sekund po záměrném úkonu řidiče popsaném ve výše uvedeném bodě 5.6.4.6.2.
5.6.4.6.5. Manévr změny jízdního pruhu musí být ukončen za méně než:
|
a) |
5 sekund u vozidel kategorií M1 a N1; |
|
b) |
10 sekund u vozidel kategorií M2, M3, N2 a N3. |
5.6.4.6.6. Při ukončení manévru změny jízdního pruhu musí funkce pro udržování v jízdním pruhu vykonávaná funkcí ACSF kategorie B1 automaticky obnovit činnost.
5.6.4.6.7. Ukazatel směru musí zůstat v činnosti po celou dobu manévru změny jízdního pruhu a musí být systémem vypnut nejpozději 0,5 sekundy poté, co činnost obnoví funkce pro udržování v jízdním pruhu vykonávaná funkcí ACSF kategorie B1, jak je popsáno výše v bodě 5.6.4.6.6.
5.6.4.6.8. Potlačení procedury změny jízdního pruhu
5.6.4.6.8.1. Procedura změny jízdního pruhu musí být systémem automaticky potlačena, když před zahájením manévru změny jízdního pruhu nastane nejméně jedna z těchto situací:
|
a) |
systém zjistí kritickou situaci (jak je definována v bodě 5.6.4.7); |
|
b) |
systém je překonán nebo vypnut řidičem; |
|
c) |
systém dosáhne svých mezních podmínek (např. přestala být detekována značení jízdního pruhu); |
|
d) |
systém zjistil, že řidič na začátku manévru změny jízdního pruhu nedrží ovládací orgán řízení; |
|
e) |
směrové svítilny jsou ručně vypnuty řidičem; |
|
f) |
manévr změny jízdního pruhu nezačal do 5,0 sekund následujících po záměrném úkonu řidiče popsaném v bodě 5.6.4.6.2; |
|
g) |
boční pohyb popsaný v bodě 5.6.4.6.4 není plynulý. |
5.6.4.6.8.2. Musí být možné, aby řidič mohl proceduru změny jízdního pruhu kdykoli ručně deaktivovat ručním ovládačem ukazatele směru.
5.6.4.7. Kritická situace
Za kritickou se považuje situace, když by v okamžiku zahájení manévru změny jízdního pruhu muselo přibližující se vozidlo v cílovém jízdním pruhu 0,4 sekundy po zahájení manévru změny jízdního pruhu zpomalit o více než 3 m/s2, aby zajistilo, že vzdálenost mezi oběma vozidly nebude nikdy menší než vzdálenost, kterou ujede vozidlo měnící jízdní pruh za 1 sekundu.
Výsledná kritická vzdálenost na začátku manévru změny jízdního pruhu se vypočte podle tohoto vzorce:
S critical = (vrear - vACSF) * tB + (vrear - vACSF)2/(2 * a) + vACSF * tG
kde:
|
vrear |
= |
skutečná rychlost přibližujícího se vozidla nebo 130 km/h, podle toho, která z hodnot je nižší, |
|
|
vACSF |
= |
skutečná rychlost vozidla s ACSF, |
|
|
a |
= |
3 m/s2 |
(zpomalení přibližujícího se vozidla), |
|
tB |
= |
0,4 s |
(okamžik po zahájení manévru změny jízdního pruhu, kdy začalo přibližující se vozidlo zpomalovat), |
|
tG |
= |
1 s |
(zbývající vzdálenost mezi vozidly po zpomalení přibližujícího se vozidla). |
5.6.4.8. Minimální vzdálenost a minimální rychlost pro uvedení v činnost
5.6.4.8.1. ACSF kategorie C musí být schopna detekovat vozidla přibližující se zezadu v sousedním jízdním pruhu do vzdálenosti Srear, jak je specifikováno níže:
|
|
Minimální vzdálenost Srear musí být určena výrobcem vozidla. Tato určená hodnota nesmí být menší než 55 m. |
|
|
Určená vzdálenost se musí přezkoušet podle příslušné zkoušky stanovené v příloze 8, přičemž se jako přibližující se vozidlo použije dvoukolové motorové vozidlo kategorie L3. |
|
|
Minimální rychlost pro uvedení v činnost Vsmin, od které smí ACSF kategorie C vykonat manévr změny jízdního pruhu, se vypočte s použitím minimální vzdálenosti Srear podle tohoto vzorce:
kde:
|
||||||||||||||||||||||||

Pokud je vozidlo provozováno v zemi s obecným omezením maximální rychlosti pod 130 km/h, může se toto omezení rychlosti použít jako alternativa k Vapp ve výše uvedeném vzorci k výpočtu minimální rychlosti pro uvedení v činnost Vsmin. V tomto případě musí být vozidlo vybaveno prostředkem k detekování země, v níž je provozováno, a musí mít k dispozici informace o obecném omezení maximální rychlosti v dotyčné zemi.
Bez ohledu na výše uvedené požadavky v tomto bodě je přípustné, aby ACSF kategorie C vykonala manévr změny jízdního pruhu při rychlostech nižších, než je vypočtená Vsmin, jsou-li splněny tyto požadavky:
|
a) |
systém detekoval jiné vozidlo v sousedním jízdním pruhu, do kterého má vozidlo vjet, ve vzdálenosti menší, než je Srear, a |
|
b) |
situace se nepovažuje za kritickou podle bodu 5.6.4.7 (např. při malých rychlostních rozdílech a Vapp< 130 km/h); |
|
c) |
určená hodnota Srear je větší než vypočtená hodnota Scritical z výše uvedeného bodu 5.6.4.7. |
5.6.4.8.2. Detekční oblast systému vozidla v úrovni vozovky musí odpovídat přinejmenším ploše znázorněné na tomto obrázku:
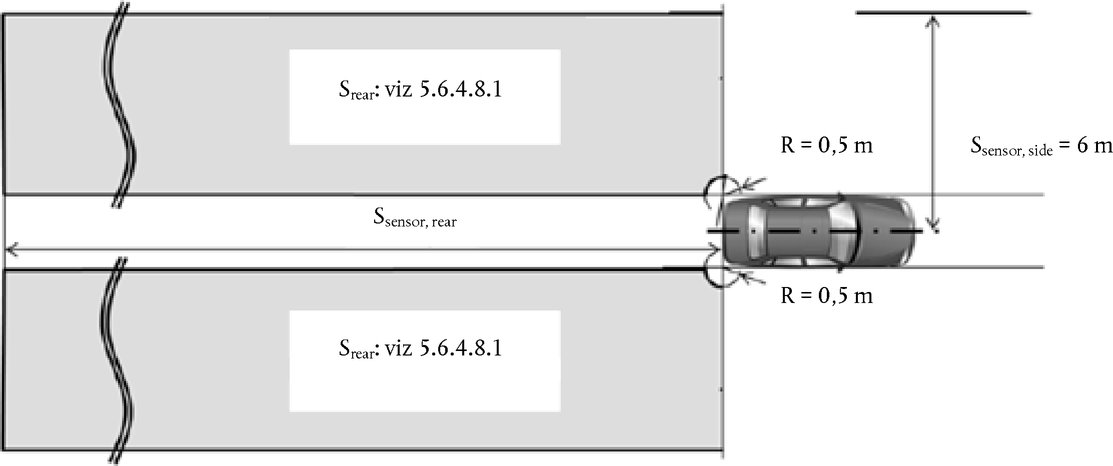
R = 0,5 m
Srear: viz 5.6.4.8.1
Ssensor, rear
Srear: viz 5.6.4.8.1
Ssensor, side = 6 m
R = 0,5 m
5.6.4.8.3. Po každém novém cyklu startování/běhu motoru vozidla (není-li vykonán automaticky, např. při činnosti systémů stop/start) musí být zabráněno, aby ACSF kategorie C vykonala manévr změny jízdního pruhu, dokud systém nedetekuje, alespoň jednou, pohybující se předmět ve vzdálenosti větší, než je minimální vzdálenost Srear určená výrobcem výše v bodě 5.6.4.8.1.
5.6.4.8.4. ACSF kategorie C musí být schopna detekovat, že čidlo přestalo mít schopnost snímat (např. v důsledku pokrytí nečistotami, ledem nebo sněhem). ACSF kategorie C musí být po zjištění takové neschopnosti zabráněno ve vykonání manévru změny jízdního pruhu. Stav systému musí být signalizován řidiči nejpozději při iniciování procedury změny jízdního pruhu. Použít se může stejná výstraha jako v bodě 5.6.4.5.5 (výstraha v případech poruchy systému).
5.6.4.9. Informační údaje o systému
5.6.4.9.1. Technické zkušebně musí být v době schvalování typu předloženy následující údaje, zároveň se složkou dokumentace požadovanou podle přílohy 6 tohoto předpisu OSN.
5.6.4.9.1.1. Podmínky, za nichž může být systém uveden v činnost, a mezní hodnoty pro jeho činnost (mezní podmínky). Výrobce vozidla musí poskytnout hodnoty pro Vsmax, Vsmin a aysmax pro každý z rozsahů rychlostí uvedených v tabulce v bodě 5.6.2.1.3 tohoto předpisu OSN.
5.6.4.9.1.2. Informace o tom, jak systém zjišťuje, zda řidič drží ovládací orgán řízení.
5.6.4.9.1.3. Prostředky k překonání a potlačení nebo vypnutí zásahu systému.
5.6.4.9.1.4. Informace o tom, jak lze prostřednictvím elektronického komunikačního rozhraní (6) zkontrolovat status výstražných signálů pro případy poruchy a potvrzení platné verze softwaru v souvislosti s vlastnostmi ACSF.
5.6.4.9.1.5. Dokumentace o tom, která verze systémového softwaru v souvislosti s vlastnostmi ACSF je platná. Tato dokumentace musí být aktualizována vždy, když se změní verze softwaru (6).
5.6.4.9.1.6. Informace o rozsahu čidla v průběhu jeho životnosti. Rozsah čidla musí být specifikován tak, aby jakýmkoli ovlivněním nebo poškozením čidla nebylo nikterak dotčeno splnění bodů 5.6.4.8.3 a 5.6.4.8.4 tohoto předpisu OSN.
5.6.4.10. Vozidlo s ACSF kategorie C se musí přezkoušet podle příslušné zkoušky (příslušných zkoušek) vozidla stanovené (stanovených) v příloze 8 tohoto předpisu OSN. Pokud jde o jízdní situace, na které se zkoušky podle přílohy 8 nevztahují, musí bezpečnou činnost ACSF prokázat výrobce vozidla na základě přílohy 6 tohoto předpisu OSN.
6. POŽADAVKY NA ZKOUŠKY
6.1. Obecná ustanovení
6.1.1. Zkouška se vykoná na rovném povrchu s dobrou adhezí.
6.1.2. Při zkoušce/zkouškách musí být vozidlo naloženo na svou maximální technicky přípustnou hmotnost a maximální technicky přípustné zatížení na řízenou nápravu/řízené nápravy.
U náprav opatřených pomocným mechanismem řízení se tato zkouška musí zopakovat s vozidlem naloženým na jeho maximální technicky přípustnou hmotnost a nápravou opatřenou pomocným mechanismem řízení zatíženou na maximální hmotnost pro ni přípustnou.
6.1.3. Před zahájením zkoušky musí být pneumatiky nahuštěny tak, jak je předepsáno výrobcem pro hmotnost uvedenou v bodě 6.1.2, když vozidlo stojí.
6.1.4. U všech systémů, jež využívají elektrickou energii pro veškerý přívod energie nebo jeho část, se všechny zkoušky účinnosti provedou za podmínek skutečného nebo simulovaného elektrického zatížení všech podstatných systémů nebo jejich součástí, které sdílí tentýž přívod energie. Podstatné systémy zahrnují alespoň systémy osvětlení, stěračů, řízení motoru a brzdové systémy.
6.2. Požadavky na motorová vozidla
6.2.1. Musí být možné vyjet z oblouku s poloměrem 50 m po tečně, bez neobvyklých vibrací v mechanismu řízení, při těchto rychlostech:
|
|
vozidla kategorie M1: 50 km/h; |
|
|
vozidla kategorií M2, M3, N1, N2 a N3: 40 km/h nebo maximální konstrukční rychlost, je-li nižší než výše uvedené rychlosti. |
6.2.2. Když vozidlo jede po kružnici se svými řízenými koly přibližně v polovině plného úhlu rejdu kol při konstantní rychlosti nejméně 10 km/h, musí zůstat kruh otáčení vozidla tentýž nebo se zvětšit, je-li ovládací orgán řízení uvolněn.
6.2.3. Při měření ovládací síly se neberou v úvahu síly s trváním kratším než 0,2 sekundy.
6.2.4. Měření ovládacích sil řízení u motorových vozidel s neporušeným mechanismem řízení
6.2.4.1. Vozidlo musí jet z přímého směru dopředu do spirály rychlostí 10 km/h. Ovládací síla řízení se měří na jmenovitém poloměru ovládacího orgánu řízení, dokud poloha ovládacího orgánu řízení neodpovídá poloměru zatáčení uvedenému v následující tabulce pro jednotlivé kategorie vozidla s neporušeným řízením. Jedno natočení řízených kol se provede napravo a druhé nalevo.
6.2.4.2. Nejvýše přípustná doba řízení a nejvýše přípustná ovládací síla řízení s neporušeným mechanismem řízení jsou uvedeny v následující tabulce pro každou kategorii vozidla.
6.2.5. Měření ovládacích sil řízení u motorových vozidel s poruchou v mechanismu řízení
6.2.5.1. Zkouška popsaná v bodě 6.2.4 se musí zopakovat s poruchou v mechanismu řízení. Ovládací síla řízení se měří, dokud poloha ovládacího orgánu řízení neodpovídá poloměru zatáčení uvedenému v následující tabulce pro jednotlivé kategorie vozidla s poruchou v mechanismu řízení.
6.2.5.2. Nejvýše přípustná doba řízení a nejvýše přípustná ovládací síla řízení s poruchou v mechanismu řízení jsou uvedeny v následující tabulce pro každou kategorii vozidla.
Tabulka 2
Požadavky na ovládací sílu řízení
|
Kategorie vozidla |
NEPORUŠENÝ MECHANISMUS ŘÍZENÍ |
PORUCHA V MECHANISMU ŘÍZENÍ |
||||
|
|
Nejvýše přípustná ovládací síla řízení (daN) |
Čas |
Poloměr zatáčení (m) |
Nejvýše přípustná ovládací síla řízení (daN) |
Čas |
Poloměr zatáčení (m) |
|
M1 |
15 |
4 |
12 |
30 |
4 |
20 |
|
M2 |
15 |
4 |
12 |
30 |
4 |
20 |
|
M3 |
20 |
4 |
12 (*2) |
45 (*1) |
6 |
20 |
|
N1 |
20 |
4 |
12 |
30 |
4 |
20 |
|
N2 |
25 |
4 |
12 |
40 |
4 |
20 |
|
N3 |
20 |
4 |
12 (*2) |
45 (*1) |
6 |
20 |
6.3. Požadavky na přípojná vozidla
6.3.1. Přípojné vozidlo se musí pohybovat bez nadměrného vybočování nebo neobvyklých vibrací v mechanismu řízení, když se tažné vozidlo pohybuje v přímce na vodorovné vozovce s rovným povrchem rychlostí 80 km/h nebo při technicky přípustné maximální rychlosti udané výrobcem přípojného vozidla, je-li nižší než 80 km/h.
6.3.2. U tažného vozidla a přípojného vozidla, která dospěla do stavu stabilního pohybu v kruhu, jenž odpovídá kruhu otáčení vozidla o poloměru 25 m (viz bod 2.4.6), při konstantní rychlosti 5 km/h, se změří kružnice opsaná zadním vnějším okrajem přípojného vozidla. Tento manévr se musí zopakovat za týchž podmínek, avšak při rychlosti 25 km/h ± 1 km/h. Během těchto manévrů nesmí zadní vnější okraj přípojného vozidla pohybující se rychlostí 25 km/h ± 1 km/h vybočit z kružnice opisované při konstantní rychlosti 5 km/h o více než 0,7 m.
6.3.3. Žádná část přípojného vozidla nesmí vybočit o více než 0,5 m mimo tečnu ke kružnici s poloměrem 25 m, je-li taženo vozidlem opouštějícím kruhovou dráhu popsanou v bodě 6.3.2 ve směru tečny a jede rychlostí 25 km/h. Tento požadavek musí být splněn od bodu, kde se tečna dotýká kružnice, až k bodu odtud vzdálenému 40 m na tečně. Od tohoto bodu musí přípojné vozidlo splňovat podmínky uvedené v bodě 6.3.1.
6.3.4. Změří se kruhová půdorysná plocha, kterou potřebuje tažné vozidlo/jízdní souprava s neporušeným systémem řízení při jízdě v kruhu s konstantním poloměrem o maximální rychlosti 5 km/h, přičemž přední vnější okraj tažného vozidla opisuje kružnici o poloměru ve výši 0,67násobku délky jízdní soupravy, nikoli však menším než 12,5 m.
6.3.4.1. Je-li šířka plochy potřebné pro kruhový pohyb změřená při zkoušce s poruchou v systému řízení větší než 8,3 m, nesmí se jednat o nárůst o více než 15 procent ve srovnání s odpovídající hodnotou změřenou při zkoušce s neporušeným systémem řízení. Nesmí dojít k žádnému zvětšení vnějšího poloměru šířky plochy potřebné pro kruhový pohyb.
6.3.5. Zkoušky popsané v bodech 6.3.2, 6.3.3 a 6.3.4 se provedou ve směru i proti směru hodinových ručiček.
7. SHODNOST VÝROBY
Postupy pro zajištění shodnosti výroby musí odpovídat postupům stanoveným v příloze 1 dohody z roku 1958 (E/ECE/TRANS/505/Rev.3) společně s následujícími požadavky:
7.1. Držitel schválení musí zajistit, aby byly výsledky zkoušek shodnosti výroby zaprotokolovány a aby byly připojené dokumenty k dispozici po dobu stanovenou v souladu se schvalovacím orgánem nebo technickou zkušebnou. Tato doba nepřesáhne 10 let od doby, kdy byla výroba definitivně ukončena.
7.2. Schvalovací orgán, který udělil schválení typu, nebo jeho technická zkušebna může kdykoli ověřit metody kontroly shodnosti používané v každém výrobním zařízení. Obvyklá četnost těchto kontrol je jednou za dva roky.
8. POSTIHY ZA NESHODNOST VÝROBY
8.1. Schválení udělené typu vozidla dle tohoto předpisu je možno odejmout, pokud není dodržen požadavek stanovený v bodě 7.1 nebo jestliže vozidla vybraná jako vzorek neodpovídají požadavkům bodu 6 tohoto předpisu.
8.2. Pokud smluvní strana dohody, která uplatňuje tento předpis, odejme schválení, které již dříve udělila, musí o tom okamžitě uvědomit ostatní smluvní strany, které tento předpis uplatňují, a to prostřednictvím formuláře sdělení podle vzoru v příloze 1 tohoto předpisu.
9. ZMĚNA A ROZŠÍŘENÍ SCHVÁLENÍ TYPU VOZIDLA
9.1. Každá změna typu vozidla se musí oznámit schvalovacímu orgánu, který schválení udělil. Schvalovací orgán pak může:
9.1.1. usoudit, že je nepravděpodobné, že by provedené změny měly znatelný nepříznivý účinek, a že vozidlo v každém případě stále splňuje požadavky, nebo
9.1.2. požadovat od technické zkušebny odpovědné za provedení zkoušek další zkušební protokol.
9.2. Potvrzení nebo rozšíření nebo odmítnutí schválení s uvedením jednotlivých úprav se oznámí stranám dohody, které uplatňují tento předpis, a to postupem stanoveným v bodě 4.3.
9.3. Schvalovací orgán, který vydává rozšíření schválení, přidělí tomuto rozšíření pořadové číslo a informuje o něm ostatní strany dohody z roku 1958, které uplatňují tento předpis, a to prostřednictvím formuláře sdělení podle vzoru v příloze 1 tohoto předpisu.
10. DEFINITIVNÍ UKONČENÍ VÝROBY
Pokud držitel schválení zcela ukončí výrobu typu vozidla schváleného podle tohoto předpisu, musí o tom informovat schvalovací orgán, který schválení udělil. Po obdržení příslušného sdělení o tom tento schvalovací orgán podá zprávu ostatním stranám dohody z roku 1958, které uplatňují tento předpis, a to prostřednictvím formuláře sdělení podle vzoru v příloze 1 tohoto předpisu.
11. NÁZVY A ADRESY TECHNICKÝCH ZKUŠEBEN ODPOVĚDNÝCH ZA PROVÁDĚNÍ SCHVALOVACÍCH ZKOUŠEK A NÁZVY A ADRESY SCHVALOVACÍCH ORGÁNŮ
Strany dohody z roku 1958, které uplatňují tento předpis, sdělí sekretariátu Organizace spojených národů názvy a adresy technických zkušeben odpovědných za provádění schvalovacích zkoušek, jakož i názvy a adresy schvalovacích orgánů, které schválení udělují a jimž se zasílají formuláře potvrzující udělení nebo odmítnutí nebo rozšíření nebo odnětí schválení vydané v jiných zemích.
12. PŘECHODNÁ USTANOVENÍ
12.1. Přechodná ustanovení použitelná pro sérii změn 02:
|
12.1.1. |
Od úředního data vstupu série změn 02 v platnost žádná ze smluvních stran, které uplatňují tento předpis OSN, neodmítne udělit nebo uznat schválení typu OSN podle tohoto předpisu OSN ve znění série změn 02, není-li níže uvedeno jinak. |
|
12.1.2. |
Od 1. dubna 2018 nejsou smluvní strany uplatňující tento předpis OSN povinny uznávat schválení typu OSN podle předchozích sérií změn, jež byla poprvé vydána po 1. dubnu 2018. |
|
12.1.3. |
Do 1. dubna 2021 smluvní strany uplatňující tento předpis OSN nadále uznávají schválení typu OSN podle předchozí série změn 01 tohoto předpisu OSN, jež byla poprvé vydána před 1. dubnem 2018. |
|
12.1.4. |
Od 1. dubna 2021 nejsou smluvní strany uplatňující tento předpis OSN povinny uznávat schválení typu OSN udělená podle předchozích sérií změn tohoto předpisu OSN. |
|
12.1.5. |
Bez ohledu na ustanovení bodu 12.1.4 zůstanou schválení typu OSN podle předchozích sérií změn tohoto předpisu OSN, jichž se série změn 02 netýká, nadále v platnosti a smluvní strany, které uplatňují tento předpis OSN, je musí nadále uznávat. |
|
12.1.6. |
Do 1. dubna 2020 je možno udělovat schválení typu podle série změn 02 tohoto předpisu OSN pro nové typy vozidel, které nesplňují požadavek uvedený v bodě 5.6.2.2.5 týkající se červené barvy výstražného signálu oznamujícího, že řidič nemá ruce na volantu, a které mají v přístrojovém panelu instalované multiinformační displeje, jež nejsou schopny vydávat červené výstražné signály nebo jež používají pouze samostatně umístěné kontrolky. |
12.2. Přechodná ustanovení použitelná pro sérii změn 03:
|
12.2.1. |
Od úředního data vstupu série změn 03 v platnost žádná ze smluvních stran, které uplatňují tento předpis OSN, neodmítne udělit nebo uznat schválení typu OSN podle tohoto předpisu OSN ve znění série změn 03. |
|
12.2.2. |
Od 1. září 2019 nejsou smluvní strany uplatňující tento předpis OSN povinny uznávat schválení typu OSN podle předchozí série změn 02, jež byla poprvé vydána po 1. září 2019. |
|
12.2.3. |
Do 1. září 2021 smluvní strany uplatňující tento předpis OSN nadále uznávají schválení typu OSN podle předchozí série změn 02 tohoto předpisu OSN, jež byla poprvé vydána před 1. zářím 2019. |
|
12.2.4. |
Od 1. září 2021 nejsou smluvní strany uplatňující tento předpis OSN povinny uznávat schválení typu udělená podle předchozích sérií změn tohoto předpisu OSN. |
|
12.2.5. |
Bez ohledu na ustanovení bodu 12.2.4 smluvní strany uplatňující tento předpis OSN nadále uznávají schválení typu OSN udělená podle předchozích sérií změn tohoto předpisu OSN pro vozidla, jichž se požadavky zavedené sérií změn 03 netýkají. |
12.3. Obecná přechodná ustanovení:
|
12.3.1. |
Smluvní strany uplatňující tento předpis OSN neodmítnou udělit schválení typu OSN nebo jejich rozšíření podle předchozích sérií změn tohoto předpisu OSN. |
(1) Podle definice v Úplném usnesení o konstrukci vozidel (R.E.3.), dokument ECE/TRANS/WP.29/78/Rev.6, bod 2 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(2) Vozidlo může jet ve stejném směru jako dané vozidlo, nebo v opačném směru než dané vozidlo.
(3) Rozlišovací čísla smluvních stran dohody z roku 1958 jsou uvedena v příloze 3 Úplného usnesení o konstrukci vozidel (R.E.3), dokument ECE/TRANS/WP.29/78/Rev. 6, příloha 3 – www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29resolutions.html
(4) Do doby, než se dohodnou jednotné zkušební postupy, poskytne výrobce technické zkušebně dokumentaci a podpůrné důkazy k prokázání toho, že je toto ustanovení splněno. Tyto informace musí být projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(5) Do doby, než se dohodnou jednotné zkušební postupy, poskytne výrobce technické zkušebně dokumentaci a podpůrné důkazy k prokázání toho, že jsou tato ustanovení splněna. Tyto informace musí být projednány a dohodnuty technickou zkušebnou a výrobcem vozidla.
(6) Jakmile dokončí pracovní skupina pro kybernetickou bezpečnost a otázky bezdrátových přenosů (Task Force on Cyber Security and Over the Air issues (TF CS/OTA)), která je podřízena neformální pracovní skupině pro inteligentní dopravní systémy/automatizovanou jízdu v rámci Světového fóra pro harmonizaci předpisů týkajících se vozidel (WP.29), svou práci ohledně opatření pro identifikaci softwarů, musí být tento bod zrevidován a v případě potřeby odpovídajícím způsobem změněn.
(*1) 50 pro tuhá vozidla se dvěma nebo více řízenými nápravami, s výjimkou samořízeného mechanismu
(*2) nebo plný rejd kol, pokud nelze dosáhnout poloměru 12 m.
PŘÍLOHA 2
USPOŘÁDÁNÍ ZNAČEK SCHVÁLENÍ
VZOR A
(Viz bod 4.4 tohoto předpisu)
Výše uvedená značka schválení umístěná na vozidle udává, že příslušný typ vozidla byl z hlediska mechanismu řízení schválen v Nizozemsku (E 4) podle předpisu OSN č. 79, pod číslem schválení 022439. Číslo schválení udává, že schválení bylo uděleno podle požadavků předpisu OSN č. 79 ve znění série změn 02.
VZOR B
(Viz bod 4.5 tohoto předpisu)

Výše uvedená značka schválení umístěná na vozidle udává, že příslušný typ vozidla byl schválen v Nizozemsku (E 4) podle předpisů č. 79 a 31 (1). Čísla schválení udávají, že k datu, kdy byla příslušná schválení udělena, zahrnoval předpis OSN č. 79 sérii změn 02 a předpis OSN č. 31 sérii změn 02.
(1) Druhé číslo je uvedeno pouze jako příklad.
PŘÍLOHA 3
Brzdný účinek u vozidel využívajících téhož zdroje energie pro napájení mechanismu řízení i brzdového zařízení
1. U zkoušek prováděných podle této přílohy musí být splněny tyto podmínky týkající se vozidla:
|
1.1. |
Vozidlo musí být naloženo na svou maximální technicky přípustnou hmotnost rozloženou na nápravy, jak je uvedeno výrobcem vozidla. V případě, že je stanoveno více alternativ rozložení hmotnosti na nápravy, musí být rozložení maximální hmotnosti na nápravy takové, aby hmotnost připadající na každou nápravu byla úměrná maximální hmotnosti přípustné pro každou nápravu. U tahače návěsů může být hmotnost přemístěna přibližně do poloviny vzdálenosti mezi polohou návěsného čepu, vycházející z výše uvedených podmínek zatížení, a střednicí zadní nápravy (zadních náprav). |
|
1.2. |
Pneumatiky musí být nahuštěny na tlak v pneumatice za studena, jenž je předepsán pro hmotnost připadající na pneumatiky, když vozidlo stojí. |
|
1.3. |
Před zahájením zkoušek musí být brzdy studené, tzn. teplota kotouče nebo vnějšího povrchu brzdového bubnu musí být nižší než 100 °C. |
2. Nastane-li porucha zdroje energie, musí účinek provozního brzdění při prvním použití brzdy dosáhnout hodnoty podle následující tabulky:
Tabulka 1
|
Kategorie |
V (km/h) |
Provozní brzdění (m/s2) |
F (daN) |
|
|
M1 |
100 |
6,43 |
50 |
|
|
M2 a M3 |
60 |
5,0 |
70 |
|
|
i) |
80 |
5,0 |
70 |
|
|
ii) |
100 |
6,43 |
50 |
|
|
N2 a N3 |
60 |
5,0 |
70 |
|
3. Po jakékoliv poruše v mechanismu řízení nebo v přívodu energie musí být možné po osminásobném plném stlačení ovládacího orgánu provozního brzdění dosáhnout při deváté aktivaci alespoň účinku předepsaného pro systém nouzového brzdění (viz níže uvedená tabulka).
V případě, kdy je účinku nouzového brzdění vyžadujícího energii ze zásobníku dosaženo samostatným ovládacím orgánem, musí být ještě možné po osminásobném plném stlačení ovládacího orgánu provozního brzdění dosáhnout při deváté aktivaci zbývajícího brzdného účinku (viz níže uvedená tabulka).
Tabulka 2
Účinek nouzového brzdění a zbývající brzdný účinek
|
Kategorie |
V (km/h) |
Nouzové brzdění (m/s2) |
Zbývající brzdný účinek (m/s2) |
|
|
M1 |
100 |
2,44 |
— |
|
|
M2 a M3 |
60 |
2,5 |
1,5 |
|
|
i) |
70 |
2,2 |
1,3 |
|
|
ii) |
100 |
2,44 |
— |
|
|
N2 |
50 |
2,2 |
1,3 |
|
|
N3 |
40 |
2,2 |
1,3 |
|
(1) Žadatel si zvolí příslušný řádek i) nebo ii). Tuto volbu musí schválit technická zkušebna.
(2) Informace: Hodnoty v řádku i) jsou v souladu s příslušnými ustanoveními obsaženými v předpise OSN č. 13, hodnoty v řádku ii) jsou v souladu s příslušnými ustanoveními obsaženými v předpise OSN č. 13-H.
(3) Žadatel si zvolí příslušný řádek i) nebo ii). Tuto volbu musí schválit technická zkušebna.
(4) Informace: Hodnoty v řádku i) jsou v souladu s příslušnými ustanoveními obsaženými v předpise OSN č. 13, hodnoty v řádku ii) jsou v souladu s příslušnými ustanoveními obsaženými v předpise OSN č. 13-H.
PŘÍLOHA 4
Doplňková ustanovení pro vozidla vybavená pomocným mechanismem řízení
1. OBECNÁ USTANOVENÍ
Vozidla vybavená pomocným mechanismem řízení musí kromě požadavků stanovených v hlavní části tohoto předpisu splňovat také požadavky této přílohy.
2. ZVLÁŠTNÍ USTANOVENÍ
2.1. Převod řízení
2.1.1. Mechanické převody řízení
Použije se bod 5.3.1.1 tohoto předpisu.
2.1.2. Hydraulické převody řízení
Hydraulické převody řízení musí být chráněny před překročením maximálního přípustného provozního tlaku T.
2.1.3. Elektrické převody řízení
Elektrické převody řízení musí být chráněny před nadměrným přívodem energie.
2.1.4. Kombinace převodů řízení
Kombinace mechanických, hydraulických a elektrických převodů musí splňovat požadavky uvedené výše v bodech 2.1.1, 2.1.2 a 2.1.3.
2.2. Požadavky na zkoušky případů poruchy
2.2.1. Selhání funkce či porucha kterékoli části pomocného mechanismu řízení (s výjimkou částí, které se nepovažují za náchylné k poruše, jak je uvedeno v bodě 5.3.1.1 tohoto předpisu) nesmí mít za následek náhlou významnou změnu v chování vozidla a příslušné požadavky bodu 6 tohoto předpisu musí být stále plněny. Dále musí být možné ovládat vozidlo bez abnormálních korekcí řízení. To se ověří následujícími zkouškami:
2.2.1.1. Zkouška jízdou po kružnici
Vozidlo musí jet po kružnici o poloměru „R“ (m) a rychlostí „v“ (km/h) odpovídajícími kategorii a hodnotám v níže uvedené tabulce:
|
Kategorie vozidla |
R (3) |
|
|
M1 a N1 |
100 |
80 |
|
M2 a N2 |
50 |
50 |
|
M3 a N3 |
50 |
45 |
Jakmile se dosáhne zkušební rychlosti, vyvolá se porucha. Zkouška zahrnuje jízdu ve směru i proti směru hodinových ručiček.
2.2.1.2. Zkouška přechodových vlastností
2.2.1.2.1. Do doby, než se dohodnou jednotné zkušební postupy, poskytne výrobce vozidla technické zkušebně své postupy a výsledky zkoušek přechodového chování vozidla v případě poruchy.
2.3. Výstražné signály v případě poruchy
2.3.1. S výjimkou částí pomocného mechanismu řízení, které se nepokládají za náchylné k poruše, jak je uvedeno v bodě 5.3.1.1 tohoto předpisu, musí být řidiči jasně signalizovány tyto poruchy pomocného mechanismu řízení:
2.3.1.1. celkový výpadek elektrického nebo hydraulického ovládání pomocného mechanismu řízení;
2.3.1.2. porucha přívodu energie do pomocného mechanismu řízení;
2.3.1.3. přerušení vnějšího vedení elektrického ovládání, je-li namontováno.
(1) Je-li pomocný mechanismus řízení při této uvedené rychlosti v mechanicky zajištěné pozici, změní se zkušební rychlost tak, aby odpovídala maximální rychlosti, při níž systém funguje. Maximální rychlostí se rozumí rychlost, při níž se pomocný mechanismus řízení zajistí, snížená o 5 km/h.
(2) Hrozí-li z důvodu rozměrových vlastností vozidla riziko převrácení, poskytne výrobce technické zkušebně údaje simulace chování vozidla, které prokazují nižší maximální bezpečnou rychlost pro provedení zkoušky. Technická zkušebna poté zvolí tuto zkušební rychlost.
(3) V případě, že uspořádání zkušební plochy neumožňuje sledovat hodnoty poloměrů, je možné zkoušky provést na dráze s jiným poloměrem (maximální odchylka: ± 25 procent), jestliže se změní rychlost tak, aby bylo dosaženo příčného zrychlení vyplývajícího z poloměru a rychlosti uvedených v tabulce pro příslušnou kategorii vozidla.
PŘÍLOHA 5
Požadavky na přípojná vozidla s hydraulickými převody řízení
1. OBECNÁ USTANOVENÍ
Vozidla vybavená hydraulickým převodem řízení musí kromě požadavků stanovených v hlavní části tohoto předpisu splňovat také požadavky této přílohy.
2. ZVLÁŠTNÍ USTANOVENÍ
2.1. Vlastnosti hydraulických potrubí a hadic
2.1.1. Hydraulická vedení hydraulického převodu musí být schopna odolat poruchovému tlaku rovnajícímu se nejméně čtyřnásobku maximálního běžného provozního tlaku (T) stanoveného výrobcem. Hadice musí splňovat požadavky norem ISO 1402:1994, 6605:1986 a 7751:1991.
2.2. Systémy závislé na přívodu energie
2.2.1. Přívod energie musí být chráněn proti nadměrnému tlaku omezovacím ventilem tlaku, který vstoupí v činnost při tlaku T.
2.3. Ochrana převodu řízení
2.3.1. Převod řízení musí být chráněn proti nadměrnému tlaku omezovacím ventilem tlaku, který vstoupí v činnost při tlaku v rozsahu od 1,1 T do 2,2 T. Provozní tlak omezovacího ventilu tlaku musí mít hodnotu odpovídající provozním charakteristikám systému řízení, který je nainstalován na vozidle. To musí potvrdit výrobce vozidla při schvalování typu.
PŘÍLOHA 6
Zvláštní požadavky týkající se bezpečnostních hledisek elektronických řídicích systémů
1. OBECNĚ
V této příloze jsou definovány zvláštní požadavky na dokumentaci, strategii týkající se poruch a na ověřování s ohledem na bezpečnostní hlediska komplexních elektronických řídicích systémů vozidel (viz bod 2.4 níže), pokud jde o tento předpis.
Tato příloha platí také pro bezpečnostní funkce uvedené v tomto předpisu OSN, které jsou řízeny elektronickým systémem (elektronickými systémy) (bod 2.3), pokud jde o tento předpis.
V této příloze nejsou specifikována kritéria účinnosti „daného systému“, ale je zde uvedena metodika uplatněná při konstrukčním procesu a informace, jež musí být pro účely schválení typu sděleny technické zkušebně.
Tyto informace musí prokázat, že „daný systém“ splňuje, jak za normálního stavu, tak při poruše, všechny příslušné požadavky na účinnost stanovené v jiných částech tohoto předpisu OSN a že je konstruován tak, aby během svého provozu nezpůsoboval kritická bezpečnostní rizika.
Žadatel (např. výrobce) může doložit, že pomocný mechanismus řízení (je-li namontován) již byl vyhodnocen v rámci schválení podle požadavků přílohy 4 tohoto předpisu OSN (jak je požadováno v původním znění tohoto předpisu OSN i v jeho sériích změn 01 a 02). V takovém případě se na tento pomocný mechanismus řízení požadavky této přílohy pro účely schválení podle série změn 03 nepoužijí.
2. DEFINICE
Pro účely této přílohy:
|
2.1. |
„systémem“ se rozumí elektronický řídicí systém nebo komplexní elektronický řídicí systém, který zajišťuje nebo tvoří část převodu ovládání funkce, které se týká tento předpis OSN. Tento termín zahrnuje také každý jiný systém, který spadá do oblasti působnosti tohoto předpisu OSN, a také přenosové spoje do jiných systémů nebo z nich, které jsou mimo oblast působnosti tohoto předpisu OSN, a které působí na funkci, které se týká tento předpis OSN; |
|
2.2. |
„koncepcí bezpečnosti“ se rozumí popis opatření začleněných do systému (např. v rámci elektronických jednotek) k zajištění integrity systému a tím bezpečného provozu jak za normálního stavu, tak při poruše, a to i v případě elektrické poruchy. Součástí koncepce bezpečnosti může být možnost omezení na částečný provoz nebo dokonce přepnutí na záložní systém pro nezbytné funkce vozidla; |
|
2.3. |
„elektronickým řídícím systémem“ se rozumí kombinace jednotek konstruovaná k tomu, aby podporovala zajištění stanovené funkce řízení vozidla pomocí elektronického zpracování dat. Takové systémy, často řízené softwarem, se skládají z jednotlivých funkčních součástí, jako jsou čidla, elektronické řídící jednotky a akční členy, a jsou propojeny přenosovými spoji. Mohou zahrnovat mechanické, elektropneumatické či elektrohydraulické prvky; |
|
2.4. |
„komplexními elektronickými řídicími systémy vozidel“ se rozumí elektronické řídicí systémy, ve kterých může být funkce řízená elektronickým systémem nebo ovládaná řidičem potlačena systémem/funkcí elektronického řízení vyšší úrovně. Funkce, která je překonána, se stane částí komplexního systému, stejně jako každý překonávající systém/každá překonávající funkce v oblasti působnosti tohoto předpisu OSN. Zahrnuty jsou také přenosové spoje do překonávajících systémů/funkcí mimo oblast působnosti tohoto předpisu OSN a z nich; |
|
2.5. |
systémy/funkcemi „elektronického řízení vyšší úrovně“ se rozumí systémy/funkce, jež využívají přídavných opatření pro zpracování a/nebo zjišťování za účelem úpravy chování vozidla pomocí změn povelů v rámci standardní funkce (standardních funkcí) řídicího systému vozidla. To komplexním systémům umožňuje automaticky měnit své účinky s prioritou, jež závisí na zjištěných okolnostech; |
|
2.6. |
„jednotkami“ se rozumí nejmenší části jednotlivých součástí systému, jimiž se tato příloha zabývá, protože tyto kombinace součástí budou pro účely identifikace, analýzy či výměny považovány za samostatné objekty; |
|
2.7. |
„přenosovými spoji“ se rozumí prostředky využívané k propojení různě rozmístěných jednotek za účelem přenosu signálů, provozních dat či přívodu energie. Z celkového pohledu se jedná o elektrická zařízení, avšak některé jejich části mohou být mechanické, pneumatické či hydraulické; |
|
2.8. |
„rozsahem řízení“ se odkazuje na výstupní veličinu a definuje rozsah, ve kterém by měl daný systém vykonávat řídící funkci; |
|
2.9. |
„hranicemi funkčního provozu“ se definují hranice vnějších fyzických faktorů, v rámci nichž je daný systém schopen zajišťovat řídicí funkci; |
|
2.10. |
„bezpečnostní funkcí“ se rozumí funkce „daného systému“, která je schopna měnit dynamické chování vozidla. „Daný systém“ může být schopen vykonávat více než jednu bezpečnostní funkci. |
3. DOKUMENTACE
3.1. Požadavky
Výrobce musí předložit složku dokumentace, která dává přehled o základní koncepci „daného systému“ a o prostředcích, pomocí kterých je tento systém propojen s ostatními systémy vozidla a kterými přímo ovládá výstupní veličiny. Musí být vysvětlena/vysvětleny funkce „daného systému“ a koncepce bezpečnosti, jak je definoval výrobce. Dokumentace musí být stručná, avšak musí dokládat, že v rámci konstrukce a vývoje bylo využito odborných znalostí ze všech oblastí daného systému, jež jsou zahrnuty. Pro účely pravidelných technických prohlídek musí dokumentace popisovat, jakým způsobem lze zkontrolovat stav fungování „daného systému“.
Technická zkušebna musí složku dokumentace vyhodnotit, aby prokázala, že „daný systém“:
|
a) |
je konstruován tak, aby během své činnosti, jak za normálního stavu, tak při poruše, nezpůsoboval kritická bezpečnostní rizika; |
|
b) |
splňuje, jak za normálního stavu, tak při poruše, všechny příslušné požadavky na účinnost stanovené v jiných částech tohoto předpisu OSN a |
|
c) |
byl vyvinut procesem/metodou podle prohlášení výrobce. |
3.1.1. Dokumentace musí obsahovat dvě části:
|
a) |
složku formální dokumentace pro schválení obsahující podklady uvedené v bodě 3 (s výjimkou podkladů uvedených v bodě 3.4.4), jež musí být předložena technické zkušebně při podání žádosti o schválení typu. Tato složka dokumentace slouží technické zkušebně jako základ pro proces ověřování stanovený v bodě 4 této přílohy. Technická zkušebna musí zajistit, aby tato složka dokumentace zůstala dostupná po dobu dohodnutou se souhlasem schvalovacího orgánu. Musí to být nejméně 10 let od doby, kdy byla výroba vozidla definitivně ukončena; |
|
b) |
další podklady a údaje analýzy podle bodu 3.4.4, které musí výrobce uchovat a poskytnout ke kontrole při schvalování typu. Výrobce musí zajistit, aby tyto podklady a údaje analýzy zůstaly dostupné po dobu 10 let od doby, kdy byla výroba vozidla definitivně ukončena. |
3.2. Popis funkcí „daného systému“
Musí být předložen popis, který jednoduchým způsobem vysvětluje všechny řídící funkce „daného systému“ a metody, které byly použity k dosažení cílů, včetně popisu mechanismu (mechanismů), kterým (kterými) se řídící funkce vykonávají.
Každá popsaná funkce, která může být překonána, musí být identifikována a musí být podán další popis změněného principu činnosti funkce.
3.2.1. Musí být předložen seznam všech vstupních a zjištěných veličin, jakož i jejich vymezený pracovní rozsah.
3.2.2. Musí být předložen seznam všech výstupních veličin, jež jsou řízeny „daným systémem“, a pro každý případ musí být udáno, zda jsou řízeny přímo nebo prostřednictvím jiného systému vozidla. Musí být vymezen rozsah řízení (bod 2.7) uplatněný u každé této veličiny.
3.2.3. Musí být uvedeny meze vymezující hranice funkčního provozu (bod 2.8), jestliže jsou pro účinky systému relevantní.
3.3. Uspořádání systému a schémata
3.3.1. Seznam součástí
Musí být předložen seznam obsahující všechny jednotky „daného systému“ a musí být uvedeny ostatní systémy vozidla, které jsou potřebné k vykonávání uvažované řídící funkce.
Musí být předložen základní přehled, jenž tyto jednotky schematicky znázorní v jejich vzájemném spojení, přičemž z něj musí jasně vyplývat rozmístění jednotlivých zařízení i jejich vzájemná propojení.
3.3.2. Funkce jednotek
Musí být uvedena funkce každé jednotky „daného systému“ a uvedeny signály, které je spojují s jinými jednotkami nebo s jinými systémy vozidla. Tento přehled lze předložit v podobě označeného blokového nebo jiného schématu či formou popisu doplněného takovým schématem.
3.3.3. Propojení
Jednotlivá propojení v rámci „daného systému“ se znázorní pomocí schématu obvodu v případě elektrických přenosových spojů, schématu potrubí v případě pneumatických či hydraulických přenosových zařízení a pomocí zjednodušeného schematického přehledu u mechanických spojů. Rovněž musí být znázorněny přenosové spoje do jiných systémů a z nich.
3.3.4. Tok signálu, provozní data a priority
Mezi uvedenými přenosovými spoji a signály a/nebo provozními daty přenášenými mezi jednotlivými jednotkami musí existovat jasný soulad. Priority signálů a/nebo provozních dat na multiplexovaných datových cestách musí být uvedeny všude, kde může priorita představovat problém ovlivňující účinnost či bezpečnost, pokud jde o tento předpis OSN.
3.3.5. Označení jednotek
Každá jednotka musí být jasně a jednoznačně identifikovatelná (např. pomocí označení pro hardware a pomocí označení nebo softwarového výstupu pro softwarový obsah), aby jí bylo možné přiřadit odpovídající hardware a dokumentaci.
V případech, kdy jsou funkce kombinovány v rámci jediné jednotky nebo ve skutečnosti v rámci jediného počítače, avšak z důvodu srozumitelnosti a názornosti znázorněny ve více blocích v blokovém schématu, použije se pouze jediné identifikační označení pro hardware. Výrobce použitím tohoto označení potvrzuje, že dodané zařízení je v souladu s odpovídajícím dokumentem.
3.3.5.1. Označení vymezuje verzi hardwaru a softwaru, přičemž v případě změny verze softwaru jako např. za účelem změny funkce jednotky, pokud jde o tento předpis, se změní i toto označení.
3.4. Koncepce bezpečnosti výrobce
3.4.1. Výrobce předloží prohlášení, kterým se potvrzuje, že strategie zvolená k dosahování požadovaných účinků „daného systému“ nesníží za podmínek bezporuchového stavu bezpečnost provozu vozidla.
3.4.2. Vysvětlí se základní architektura softwaru použitého v „daném systému“ a uvedou se metody a nástroje použité při jeho návrhu. Výrobce musí předložit doklady o prostředcích, jejichž pomocí v průběhu procesu návrhu a vývoje stanovil provedení logiky systému.
3.4.3. Výrobce musí technické zkušebně poskytnout vysvětlení konstrukčních opatření integrovaných do „daného systému“ k zajištění bezpečného provozu v poruchovém stavu. Jako příklady případných konstrukčních opatření pro případ poruchy v „daném systému“ lze uvést:
|
a) |
omezení na provoz za použití pouze určité části systému; |
|
b) |
přepnutí na samostatný záložní systém; |
|
c) |
vyřazení funkce vyšší úrovně. |
V případě poruchy musí být řidič upozorněn např. pomocí výstražného signálu nebo zobrazeného hlášení. Není-li systém deaktivován řidičem, např. otočením spínače zapalování do polohy „vypnuto“ nebo vypnutím příslušné funkce, je-li za tímto účelem k dispozici zvláštní vypínač, musí být výstraha patrná po celou dobu trvání poruchového stavu.
3.4.3.1. V případě, že vybrané opatření zvolí provozní režim částečné účinnosti za určitých podmínek poruchového stavu, musí být tyto podmínky uvedeny a musí být vymezena výsledná omezení účinnosti.
3.4.3.2. V případě, že vybrané opatření zvolí pro dosažení požadovaného účinku řídicího systému vozidla druhotné (záložní) prostředky, musí být vysvětleny zásady mechanismu přepínání, logika a úroveň rezervy a veškeré prvky kontroly zálohy a musí být vymezena výsledná omezení účinnosti zálohy.
3.4.3.3. V případě, že se pomocí vybraného opatření zvolí vypnutí funkce vyšší úrovně, musí být potlačeny všechny příslušné výstupní řídící signály s touto funkcí spojené, a sice takovým způsobem, aby se omezila přechodová rušení.
3.4.4. K dokumentaci musí být přiložena analýza, která celkově znázorní, jak se systém bude chovat v případě výskytu jakéhokoli jednotlivého nebezpečí nebo poruchy, které budou mít vliv na účinnost řízení vozidla či bezpečnost.
Zvolený analytický přístup (přístupy) musí být zaveden (zavedeny) a udržován (udržovány) výrobcem a musí být zpřístupněn (zpřístupněny) technické zkušebně ke kontrole při schvalování typu.
Technická zkušebna musí vyhodnotit použití analytického přístupu (přístupů). Vyhodnocení musí zahrnovat:
|
a) |
ověření bezpečnostního přístupu na úrovni koncepce (vozidla) a potvrzení toho, že jsou zohledněny interakce s jinými systémy vozidla. Tento přístup musí být založen na analýze nebezpečí/rizik vhodné z hlediska aspektů bezpečnosti systému; |
|
b) |
ověření bezpečnostního přístupu na úrovni systému. Tento přístup musí být založen na analýze způsobů selhání a jejich následků (FMEA), analýze pomocí stromové struktury příčin (FTA) nebo na jakémkoli jiném podobném postupu vhodném z hlediska aspektů bezpečnosti systému; |
|
c) |
ověření validačních plánů a výsledků. Při této validaci musí být použito například modelování programem na hardwaru (Hardware in the Loop testing), provozní zkouška vozidla na silnici nebo jiný prostředek vhodný pro validaci. |
Hodnocení se musí skládat z kontrol nebezpečí a poruch zvolených technickou zkušebnou, aby se potvrdilo, že vysvětlení koncepce bezpečnosti ze strany výrobce je srozumitelné a logické a že validační plány jsou vhodné a byly splněny.
Technická zkušebna může k ověření koncepce bezpečnosti vykonat zkoušky uvedené v bodě 4, nebo požadovat, aby byly takové zkoušky vykonány.
3.4.4.1. Tato dokumentace musí obsahovat podrobný seznam sledovaných parametrů a pro každý poruchový stav podle bodu 3.4.4 této přílohy musí stanovit výstražný signál určený řidiči a/nebo obsluhujícímu personálu/personálu provádějícímu technickou kontrolu.
3.4.4.2. Tato dokumentace musí popsat zavedená opatření, která zajišťují, že „daný systém“ neohrožuje bezpečný provoz vozidla, jsou-li vlastnosti „daného systému“ ovlivněny podmínkami vnějšího prostředí, např. klimatem, teplotou, vniknutím prachu, vniknutím vody, nánosem ledu.
4. OVĚŘENÍ A ZKOUŠKA
4.1. Funkční provoz „daného systému“, jak je stanoven v dokumentech požadovaných v bodě 3, se zkouší takto:
4.1.1. Ověření funkce „daného systému“
Technická zkušebna ověří „daný systém“ v bezporuchovém stavu zkouškami určitého počtu funkcí zvolených z těch, které výrobce uvedl podle bodu 3.2.
U komplexních elektronických systémů musí tyto zkoušky zahrnout scénáře, kdy je uvedená funkce překonána;
4.1.2. Ověření koncepce bezpečnosti podle bodu 3.4
Reakce „daného systému“ pod vlivem poruchy v jakékoli samostatné jednotce se musí zkontrolovat použitím odpovídajících výstupních signálů do elektrických jednotek nebo mechanických prvků za účelem simulace účinků vnitřních poruch v rámci dané jednotky. Technická zkušebna musí tuto kontrolu provést nejméně u jedné samostatné jednotky, avšak nesmí kontrolovat reakci „daného systému“ na současné vícenásobné poruchy samostatných jednotek.
Technická zkušebna musí ověřit, že tyto zkoušky zahrnují prvky, které mohou ovlivňovat řiditelnost vozidla a informace pro uživatele (prvky týkající se rozhraní člověk–stroj).
4.1.2.1. Výsledky ověření se musí shodovat s doloženým shrnutím analýzy poruchy na úrovni celkového účinku tak, aby koncepce bezpečnosti a její realizace byly potvrzeny jako přiměřené.
5. PROTOKOLY TECHNICKÉ ZKUŠEBNY
Protokoly o hodnocení vydávané technickou zkušebnou musí být vyhotoveny tak, aby umožňovaly zpětnou zjistitelnost, např. verze kontrolovaných dokumentů jsou kódovány a uvedeny v záznamech technické zkušebny.
Příklad možného uspořádání způsobu hodnocení technickou zkušebnou určeného pro schvalovací orgán je uveden v dodatku 1 k této příloze.
DODATEK 1
Vzor formuláře hodnocení pro elektronické systémy
ZKUŠEBNÍ PROTOKOL č.: …
1. OZNAČENÍ
1.1. Značka vozidla: …
1.2. Typ: …
1.3. Způsob označení typu, je-li na vozidle vyznačen: …
1.3.1. Umístění uvedeného označení: …
1.4. Název a adresa výrobce: …
1.5. Případně název a adresa zástupce výrobce: …
1.6. Složka formální dokumentace výrobce:
|
|
Referenční číslo dokumentace: … |
|
|
Datum původního vydání: … |
|
|
Datum poslední aktualizace: … |
2. POPIS ZKOUŠENÉHO VOZIDLA (ZKOUŠENÝCH VOZIDEL)/SYSTÉMU (SYSTÉMŮ)
2.1. Obecný popis: …
2.2. Popis všech řídicích funkcí „daného systému“ a způsobů činnosti: …
2.3. Popis součástí a schémata jednotlivých propojení v „daném systému“: …
3. KONCEPCE BEZPEČNOSTI VÝROBCE
3.1. Popis toku signálů, pracovních dat a jejich priorit: …
3.2. Prohlášení výrobce:
Výrobce (výrobci) … potvrzuje (potvrzují), že strategie zvolená k dosahování požadovaných účinků „daného systému“ nesníží za podmínek bezporuchového stavu bezpečnost provozu vozidla.
3.3. Základní architektura softwaru a metody a nástroje použité při jeho návrhu: …
3.4. Vysvětlení konstrukčních opatření integrovaných do „daného systému“ pro případ poruchového stavu: …
3.5. Dokumentované analýzy chování „daného systému“ při jednotlivých nebezpečích nebo poruchách: …
3.6. Popis opatření zavedených s ohledem na podmínky vnějšího prostředí: …
3.7. Ustanovení pro pravidelnou technickou prohlídku „daného systému“: …
3.8. Výsledky ověřovací zkoušky „daného systému“ podle bodu 4.1.1 přílohy 6 předpisu OSN č. 79: …
3.9. Výsledky ověřovací zkoušky koncepce bezpečnosti podle bodu 4.1.2 přílohy 6 předpisu OSN č. 79: …
3.10. Datum zkoušky: …
3.11. Tato zkouška byla provedena a její výsledky byly zaznamenány do protokolu podle … předpisu OSN č. 79 naposledy pozměněného sérií změn …
Technická zkušebna (1), která vykonala zkoušky
Podpis: …
Datum: …
3.12. Schvalovací orgán (1)
Podpis: …
Datum: …
3.13. Poznámky:
(1) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
PŘÍLOHA 7
Zvláštní požadavky na dodávání elektrické energie z tažného vozidla do systémů řízení přípojného vozidla
1. OBECNĚ
Požadavky této přílohy platí pro tažná vozidla a přípojná vozidla, u nichž se elektrická energie přivádí z tažného vozidla, aby usnadnila činnost systému řízení instalovaného na přípojném vozidle.
2. POŽADAVKY NA TAŽNÁ VOZIDLA
2.1. Přívod energie
2.1.1. Výrobce vozidla musí určit kapacitu zdroje energie, která umožní, aby byl k dispozici proud stanovený dále v bodě 2.3 pro přípojné vozidlo během normálního provozu vozidla.
2.1.2. V příručce pro řidiče musí být uvedena informace udávající řidiči elektrickou energii, která je k dispozici pro systém řízení přípojného vozidla, a o tom, že elektrické rozhraní nesmí být spojeno, jestliže požadavek na proud uvedený na přípojném vozidle překračuje hodnotu, která může být přiváděna z tažného vozidla.
2.1.3. K dodávce energie do systému řízení přípojného vozidla se musí jako napájecí zdroj použít konektor uvedený dále v bodě 2.5. Ve všech případech však musí platit ustanovení dále uvedeného bodu 3.3.
2.2. Jmenovité provozní napětí je 24 V.
2.3. Výrobce tažného vozidla musí určit maximální hodnotu přiváděného proudu, který je k dispozici na konektoru uvedeném dále v bodě 2.5.2.
2.4. Ochrana elektrického systému
2.4.1. Při přivádění energie do systému řízení přípojného vozidla musí být elektrický systém tažného vozidla chráněn před přetížením nebo zkratem.
2.5. Vedení a konektory
2.5.1. Kabely použité k přívodu elektrické energie do přípojného vozidla musí mít průřez vodiče odpovídající trvalému proudu stanovenému výše v bodě 2.3.
2.5.2. Do doby, než bude vydána jednotná norma, musí konektor použitý ke spojení s přípojným vozidlem splňovat následující požadavky:
|
a) |
kolíky musí mít proudovou zatížitelnost odpovídající maximálnímu trvalému proudu stanovenému výše v bodě 2.3; |
|
b) |
do doby, než budou dohodnuty jednotné normy, musí být ochrana konektoru proti působení vnějšího prostředí taková, aby odpovídala způsobu používání, a musí být zahrnuta do hodnocení podle přílohy 6 a |
|
c) |
konektor nesmí být zaměnitelný s existujícím elektrickým konektorem běžně používaným na tažném vozidle, tj. konektorem podle ISO 7638, ISO 12098 atd. |
2.6. Označení
2.6.1. Tažné vozidlo musí být označeno údajem maximálního proudu, který je k dispozici pro přípojné vozidlo a který je stanoven výše v bodě 2.3.
Označení musí být nesmazatelné a musí být umístěno tak, aby bylo viditelné při spojování elektrického rozhraní uvedeného výše v bodě 2.5.2.
3. POŽADAVKY NA PŘÍPOJNÁ VOZIDLA
3.1. Výrobce vozidla stanoví maximální proud, který je požadován pro systém řízení přípojného vozidla.
3.2. Jmenovité provozní napětí je 24 V.
3.3. Elektrická energie, která je k dispozici z tažného vozidla, smí být používána pouze takto:
|
a) |
výhradně k použití pro systém řízení přípojného vozidla, nebo |
|
b) |
pro systém řízení přípojného vozidla a k napájení pomocných systémů na přípojném vozidle, za podmínky, že systém řízení má prioritu a je chráněn před přetížením způsobeným vně systému řízení. Tato ochrana musí být jednou z funkcí systému řízení přípojného vozidla. |
3.4. Vedení a konektory
3.4.1. Kabely použité k přívodu elektrické energie do systému řízení přípojného vozidla musí mít průřez vodiče odpovídající požadavkům na energii, které má systém řízení instalovaný na přípojném vozidle.
3.4.2. Do doby, než bude vydána jednotná norma, musí konektor použitý ke spojení s přípojným vozidlem splňovat následující požadavky:
|
a) |
kolíky musí mít proudovou zatížitelnost odpovídající maximálnímu proudu stanovenému výrobcem vozidla výše v bodě 3.1; |
|
b) |
do doby, než budou dohodnuty jednotné normy, musí být ochrana konektoru proti působení vnějšího prostředí taková, aby odpovídala způsobu používání, a musí být zahrnuta do hodnocení podle přílohy 6; |
|
c) |
konektor nesmí být zaměnitelný s existujícím elektrickým konektorem běžně používaným na tažném vozidle, tj. konektorem podle ISO 7638, ISO 12098 atd. |
3.5. Výstražná signalizace poruchy:
Poruchy v převodu elektrického ovládání systému řízení musí být přímo signalizovány řidiči.
3.6. Prokázání činnosti systému řízení
3.6.1. Během schvalování typu musí výrobce přípojného vozidla prokázat technické zkušebně funkčnost systému řízení tak, že systém splňuje příslušné požadavky na vlastnosti stanovené v tomto předpisu.
3.6.2. V případě poruchy:
3.6.2.1. Za ustáleného stavu:
Když se přípojné vozidlo připojí k tažnému vozidlu, které nemá zařízení k přívodu elektrické energie pro systém řízení přípojného vozidla, nebo dojde k přerušení přívodu elektrické energie do systému řízení přípojného vozidla, nebo dojde k poruše v převodu elektrického ovládání systému řízení přípojného vozidla, musí být prokázáno, že přípojné vozidlo splňuje všechny příslušné požadavky bodu 6.3 tohoto předpisu pro neporušený systém.
3.6.2.2. Za neustáleného stavu:
Neustálené chování vozidla v případě poruchy v převodu elektrického ovládání systému řízení se musí vyhodnotit tak, aby bylo zaručeno, že se udrží stabilita vozidla v průběhu přechodné periody, ke které dojde po poruše, a to následujícími zkouškami:
|
a) |
použitím zkušebního postupu a požadavků stanovených v bodě 6.3.1 tohoto předpisu (1); |
|
b) |
použitím zkušebního postupu a požadavků stanovených v bodě 6.3.3 tohoto předpisu (1). |
3.6.3. Pokud systém řízení přípojného vozidla používá k ovládání řízení hydraulický převod, platí požadavky přílohy 5.
3.7. Označení
3.7.1. Přípojná vozidla vybavená konektorem pro přívod elektrické energie do systému řízení přípojného vozidla musí být označena následujícími údaji:
|
a) |
maximální proud, který je požadován pro systém řízení přípojného vozidla podle výše uvedeného bodu 3.1; |
|
b) |
fungování systému řízení přípojného vozidla, včetně vlivu na manévrovatelnost, když je konektor připojen a když je odpojen. |
Označení musí být nesmazatelné a musí být umístěno tak, aby bylo viditelné při spojování elektrického rozhraní uvedeného výše v bodě 3.3.2.
(1) Technická zkušebna může uznat výsledky zkoušek předložené výrobcem přípojného vozidla k prokázání splnění zkoušek v neustáleném stavu.
PŘÍLOHA 8
Požadavky na zkoušky funkcí korektivního a automatického řízení
1. OBECNÁ USTANOVENÍ
Vozidla vybavená systémy s funkcí korektivního řízení a/nebo ACSF musí splňovat požadavky na příslušné zkoušky podle této přílohy.
2. ZKUŠEBNÍ PODMÍNKY
Zkouší se na hladkém, suchém asfaltovém či betonovém povrchu, kde jsou dobré adhezní podmínky. Teplota prostředí musí být 0 °C až 45 °C.
2.1. Značení jízdního pruhu
Značení jízdního pruhu na vozovce použitá ke zkouškám musí být stejná jako některé ze značení popsaných v příloze 3 předpisu OSN č. 130. Značení musí být v dobrém stavu a musí být provedena materiálem splňujícím normu pro viditelná značení jízdního pruhu. Uspořádání značení jízdního pruhu použitých ke zkouškám se zaznamená ve zkušebním protokolu.
Šířka jízdního pruhu pro účely zkoušek podle této přílohy musí být nejméně 3,5 m.
Zkouška se provádí za podmínek viditelnosti, které umožňují bezpečnou jízdu v požadované zkušební rychlosti.
Výrobce vozidla musí předložením dokumentace prokázat soulad se všemi ostatními značeními jízdního pruhu uvedenými v příloze 3 předpisu OSN č. 130. Veškerá taková dokumentace se připojí ke zkušebnímu protokolu.
2.2. Povolené odchylky
Všechny rychlosti vozidla stanovené pro zkoušky popsané v této příloze musí být dodrženy s povolenou odchylkou ± 2 km/h.
2.3. Podmínky týkající se vozidla
2.3.1. Hmotnost při zkoušce
Vozidlo se zkouší se zatížením dohodnutým mezi výrobcem a příslušnou technickou zkušebnou. Jakmile zkouška začne, nesmí být prováděny žádné změny zatížení. Výrobce vozidla musí předložením dokumentace prokázat, že systém funguje při každém zatížení.
2.3.2. Zkouška se provádí s takovým tlakem v pneumatikách, jaký doporučuje výrobce vozidla.
2.4. Boční zrychlení
Poloha těžiště, při které se měří boční zrychlení, se určí po dohodě mezi výrobcem vozidla a technickou zkušebnou. Poloha se uvede ve zkušebním protokolu.
Boční zrychlení se měří bez zohlednění dalších účinků vlivem pohybů karoserie vozidla (např. klopení odpružené hmoty).
3. ZKUŠEBNÍ POSTUPY
3.1. Zkoušky týkající se funkce korektivního řízení
Následující zkouška se týká funkcí korektivního řízení definovaných v písmenu c) definice funkce korektivního řízení v bodě 2.3.4.2 tohoto předpisu.
3.1.1. Zkouška výstražné signalizace týkající se funkce korektivního řízení
3.1.1.1. Vozidlo musí jet s aktivovanou funkcí korektivního řízení na vozovce se značeními jízdního pruhu na každé straně jízdního pruhu. V případě funkce korektivního řízení, jejíž zásahy vycházejí pouze z vyhodnocení přítomnosti a umístění ohraničení jízdního pruhu, musí jet vozidlo na vozovce vymezené ohraničeními podle prohlášení výrobce (např. okrajem vozovky).
Zkušební podmínky a zkušební rychlost vozidla musí být v rámci provozního rozsahu systému.
V průběhu zkoušky se zaznamenává doba trvání zásahů funkce korektivního řízení a optických a zvukových výstražných signálů.
V případě bodu 5.1.6.1.2.1 tohoto předpisu musí jet vozidlo tak, aby se snažilo opustit jízdní pruh a vyvolalo zásah funkce korektivního řízení, který se udržuje po dobu delší než 10 s (u M1 a N1) nebo 30 s (u M2, M3, N2 a N3). Pokud není možné takovou zkoušku uskutečnit z praktických důvodů, například kvůli omezení zkušebního prostoru, může být tento požadavek splněn, se souhlasem schvalovacího orgánu, předložením dokumentace.
Požadavky zkoušky jsou splněny, pokud:
|
— |
zvukový výstražný signál je vydán nejpozději za 10 s (u M1 a N1) nebo 30 s (u M2, M3, N2 a N3) od začátku zásahu. |
V případě bodu 5.1.6.1.2.2 tohoto předpisu musí jet vozidlo tak, aby se snažilo opustit jízdní pruh a vyvolalo nejméně tři zásahy systému v intervalu jízdy trvajícím 180 s.
Požadavky zkoušky jsou splněny, pokud:
|
a) |
optický výstražný signál je vydán pro každý zásah, a to tak dlouho, dokud zásah trvá, a |
|
b) |
zvukový výstražný signál je vydán při druhém a třetím zásahu, a |
|
c) |
zvukový výstražný signál při třetím zásahu trvá nejméně o 10 s déle než zvukový výstražný signál při druhém zásahu. |
3.1.1.2. Navíc musí výrobce ke spokojenosti technické zkušebny prokázat, že požadavky stanovené v bodech 5.1.6.1.1 a 5.1.6.1.2 jsou splněny v celém provozním rozsahu funkce korektivního řízení. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.1.2. Zkouška síly potřebné k překonání systému
3.1.2.1. Vozidlo musí jet s aktivovanou funkcí korektivního řízení na vozovce se značeními jízdního pruhu na každé straně jízdního pruhu.
Zkušební podmínky a zkušební rychlost vozidla musí být v rámci provozního rozsahu systému.
Vozidlo musí jet tak, aby se snažilo opustit jízdní pruh a vyvolalo zásah funkce korektivního řízení. Během zásahu musí řidič působit na ovládací orgán řízení takovou silou, aby zásah překonal.
Zaznamená se síla, kterou řidič působí na ovládací orgán řízení k překonání zásahu.
3.1.2.2. Požadavky zkoušky jsou splněny, pokud síla, kterou řidič působí na ovládací orgán řízení k překonání zásahu, nepřekračuje 50 N.
3.1.2.3. Navíc musí výrobce ke spokojenosti technické zkušebny prokázat, že požadavky stanovené v bodě 5.1.6.1.3 jsou splněny v celém provozním rozsahu funkce korektivního řízení. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.2. Zkoušky týkající se systémů s ACSF kategorie B1
3.2.1. Funkční zkouška udržování v jízdním pruhu
3.2.1.1. Rychlost vozidla musí zůstat v rozsahu od Vsmin do Vsmax.
Zkouška se vykoná pro každý z rozsahů rychlostí stanovených v bodě 5.6.2.1.3 tohoto předpisu zvlášť, nebo v sousedních rozsazích rychlostí, ve kterých má aysmax identickou hodnotu.
Vozidlo musí jet stálou rychlostí po zakřivené dráze se značeními jízdního pruhu na obou stranách, aniž by řidič působil jakoukoli silou na ovládací orgán řízení (např. sejmutím rukou z ovládacího orgánu řízení).
Boční zrychlení potřebné k vykonání zatáčky musí být mezi 80 a 90 % maximálního bočního zrychlení aysmax stanoveného výrobcem vozidla.
V průběhu zkoušky se zaznamená boční zrychlení a boční trhnutí.
3.2.1.2. Požadavky zkoušky jsou splněny, pokud:
|
|
vozidlo nepřekročí žádné ze značení jízdního pruhu; |
|
|
klouzavý průměr bočního trhnutí o trvání 0,5 s nepřekročí 5 m/s3. |
3.2.1.3. Výrobce vozidla musí ke spokojenosti technické zkušebny prokázat, že požadavky jsou splněny pro celý rozsah bočního zrychlení a celý rozsah rychlostí. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.2.2. Zkouška maximálního bočního zrychlení
3.2.2.1. Rychlost vozidla musí zůstat v rozsahu od Vsmin do Vsmax.
Zkouška se vykoná pro každý z rozsahů rychlostí stanovených v bodě 5.6.2.1.3 tohoto předpisu zvlášť, nebo v sousedních rozsazích rychlostí, ve kterých má aysmax identickou hodnotu.
Vozidlo musí jet stálou rychlostí po zakřivené dráze se značeními jízdního pruhu na obou stranách, aniž by řidič působil jakoukoli silou na ovládací orgán řízení (např. sejmutím rukou z ovládacího orgánu řízení).
Technická zkušebna stanoví zkušební rychlost a poloměr, které způsobí vyšší zrychlení než aysmax + 0,3 m/s2 (např. projetím zatáčkou daného poloměru ve vyšší rychlosti).
V průběhu zkoušky se zaznamená boční zrychlení a boční trhnutí.
3.2.2.2. Požadavky zkoušky jsou splněny, pokud:
|
|
zaznamenané zrychlení je v rámci mezí stanovených v bodě 5.6.2.1.3 tohoto předpisu; |
|
|
klouzavý průměr bočního trhnutí o trvání 0,5 s nepřekročí 5 m/s3. |
3.2.3. Zkouška síly potřebné k překonání systému
3.2.3.1. Rychlost vozidla musí zůstat v rozsahu od Vsmin do Vsmax.
Vozidlo musí jet stálou rychlostí po zakřivené dráze se značeními jízdního pruhu na obou stranách, aniž by řidič působil jakoukoli silou na ovládací orgán řízení (např. sejmutím rukou z ovládacího orgánu řízení).
Boční zrychlení potřebné k vykonání zatáčky musí být mezi 80 a 90 % minimální hodnoty stanovené v tabulce v bodě 5.6.2.1.3. tohoto předpisu.
Následně musí řidič působit na ovládací orgán řízení takovou silou, aby překonal zásah systému a opustil jízdní pruh.
Zaznamená se síla, kterou řidič působí na ovládací orgán řízení během manévru k překonání systému.
3.2.3.2. Požadavky zkoušky jsou splněny, pokud síla, kterou řidič působí na ovládací orgán řízení během manévru k překonání systému, je menší než 50 N.
Výrobce musí předložením příslušné dokumentace prokázat, že tato podmínka je splněna v celém rozsahu činnosti ACSF.
3.2.4. Zkouška přechodových vlastností; zkouška, zda má řidič ruce na ovládacím orgánu řízení
3.2.4.1. Vozidlo musí jet s aktivovanou ACSF zkušební rychlostí mezi Vsmin + 10 km/h a Vsmin + 20 km/h na dráze se značeními jízdního pruhu na obou stranách jízdního pruhu.
Řidič uvolní ovládací orgán řízení a pokračuje v jízdě do doby, než systém funkci ACSF deaktivuje. Dráha se musí vybrat tak, aby umožňovala jízdu s aktivovanou ACSF po dobu nejméně 65 s bez jakéhokoli zásahu řidiče.
Zkouška se musí zopakovat se zkušební rychlostí vozidla mezi Vsmax – 20 km/h a Vsmax – 10 km/h nebo 130 km/h, podle toho, která hodnota je nižší.
Navíc musí výrobce vozidla ke spokojenosti technické zkušebny prokázat, že požadavky jsou splněny pro celý rozsah rychlostí. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.2.4.2. Požadavky zkoušky jsou splněny, pokud:
|
|
Optický výstražný signál byl vydán nejpozději 15 s od uvolnění ovládacího orgánu řízení a zůstane v činnosti do doby, než je ACSF deaktivována. |
|
|
Zvukový výstražný signál byl vydán nejpozději 30 s od uvolnění ovládacího orgánu řízení a zůstane v činnosti do doby, než je ACSF deaktivována. |
|
|
ACSF je deaktivována nejpozději 30 s od spuštění zvukového výstražného signálu vydáním zvukového nouzového signálu trvajícího nejméně 5 s, který se od předchozího zvukového výstražného signálu liší. |
3.3. Zkoušky týkající se funkce nouzového řízení
Vozidlo musí jet s aktivovanou funkcí nouzového řízení na vozovce se značeními jízdního pruhu na každé straně jízdního pruhu, přičemž se musí nalézat mezi těmito značeními jízdního pruhu.
Zkušební podmínky a zkušební rychlosti vozidla musí být v rámci provozního rozsahu systému podle prohlášení výrobce.
Zvláštní podrobné informace o povinných zkouškách, které jsou popsány níže, se musí projednat a dohodnout mezi výrobcem vozidla a technickou zkušebnou, aby byly požadované zkoušky přizpůsobeny deklarovanému případu (deklarovaným případům) použití, pro který (které) je činnost funkce nouzového řízení určena.
Navíc musí výrobce ke spokojenosti technické zkušebny prokázat, že požadavky stanovené v bodech 5.1.6.2.1 až 5.1.6.2.6 jsou splněny v celém rozsahu činnosti funkce nouzového řízení (specifikovaném výrobcem vozidla v informačních údajích o systému). Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.3.1. Zkouška týkající se funkce nouzového řízení typu a) i)/ii): (nezamýšlený boční manévr)
Cílové vozidlo jedoucí v sousedním jízdním pruhu se musí přibližovat ke zkoušenému vozidlu a jedno z vozidel musí minimalizovat vzájemnou boční vzdálenost, dokud není zahájen zásah funkce nouzového řízení.
Požadavky zkoušky jsou splněny, pokud:
|
a) |
výstražné signály stanovené v bodě 5.1.6.2.6 tohoto předpisu OSN jsou vydány nejpozději v okamžiku zahájení zásahu funkce nouzového řízení a |
|
b) |
zásahem funkce nouzového řízení vozidlo neopustilo svůj původní jízdní pruh. |
3.3.2. Zkouška týkající se funkce nouzového řízení typu a) iii): (zamýšlený boční manévr)
Zkoušené vozidlo začne vykonávat změnu jízdního pruhu, zatímco jiné vozidlo jede v sousedním jízdním pruhu, a bez zásahu systému funkce nouzového řízení by tedy došlo ke kolizi.
Požadavky zkoušky jsou splněny, pokud:
|
a) |
zásah funkce nouzového řízení je zahájen a |
|
b) |
výstražné signály stanovené v bodě 5.1.6.2.6 tohoto předpisu jsou vydány nejpozději v okamžiku zahájení zásahu funkce nouzového řízení a |
|
c) |
zásahem funkce nouzového řízení vozidlo neopustilo svůj původní jízdní pruh. |
3.3.3. Zkouška týkající se funkce nouzového řízení typu b):
Zkoušené vozidlo se musí přibližovat k předmětu, který se nachází v jeho trajektorii. Předmět musí mít takovou velikost a musí být umístěn tak, aby jej vozidlo mohlo objet bez překročení značení jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud:
|
a) |
zásahem funkce nouzového řízení se zabránilo kolizi nebo jsou zmírněny její následky a |
|
b) |
výstražné signály stanovené v bodě 5.1.6.2.6 tohoto předpisu OSN jsou vydány nejpozději v okamžiku zahájení zásahu funkce nouzového řízení a |
|
c) |
zásahem funkce nouzového řízení vozidlo neopustilo svůj jízdní pruh. |
3.3.4. Zkoušky systémů, které jsou schopny fungovat bez značení jízdního pruhu
V případě systémů, které fungují bez značení jízdního pruhu, se příslušné zkoušky podle bodů 3.3.1 až 3.3.3 musí zopakovat na zkušební dráze bez značení jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud:
|
a) |
zásah funkce nouzového řízení je zahájen a |
|
b) |
výstražné signály stanovené v bodě 5.1.6.2.6 tohoto předpisu OSN jsou vydány nejpozději v okamžiku zahájení zásahu funkce nouzového řízení a |
|
c) |
boční vychýlení během manévru je maximálně 0,75 m, jak je stanoveno v bodě 5.1.6.2.2, a |
|
d) |
zásahem funkce nouzového řízení nevyjelo vozidlo z vozovky. |
3.3.5. Zkouška chybné reakce u funkce nouzového řízení typu b):
Zkoušené vozidlo se musí přibližovat k tenké plastové desce, která má jinou barvu než povrch vozovky, tloušťku menší než 3 mm, šířku 0,8 m a délku 2 m a je umístěna mezi značeními jízdního pruhu v trajektorii vozidla. Tenká plastová deska musí být umístěna tak, aby ji vozidlo mohlo objet bez překročení značení jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud funkce nouzového řízení nezačne vykonávat žádný zásah.
3.4. (Rezervováno pro ACSF kategorie B2)
3.5. Zkoušky týkající se systémů s ACSF kategorie C
Pokud není stanoveno jinak, musí všechny zkušební rychlosti vozidla vycházet z Vapp = 130 km/h.
Pokud není stanoveno jinak, musí být přibližujícím se vozidlem typově schválené sériově vyráběné vozidlo.
Výrobce vozidla musí ke spokojenosti technické zkušebny prokázat, že požadavky jsou splněny pro celý rozsah rychlostí. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.5.1. Funkční zkouška změny jízdního pruhu
3.5.1.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů. Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje změnu jízdního pruhu do sousedního pruhu.
V průběhu zkoušky se zaznamená boční zrychlení a boční trhnutí.
3.5.1.2. Požadavky zkoušky jsou splněny, pokud:
|
a) |
boční pohyb ke značení nezačne dříve než za 1 sekundu po iniciování procedury změny jízdního pruhu; |
|
b) |
boční pohyb k přiblížení se značení jízdního pruhu a boční pohyb potřebný k uskutečnění manévru změny jízdního pruhu jsou vykonány jako jediný plynulý pohyb; |
|
c) |
zaznamenané boční zrychlení nepřesahuje 1 m/s2; |
|
d) |
klouzavý průměr bočního trhnutí o trvání 0,5 s nepřekročí 5 m/s3; |
|
e) |
čas měřený mezi začátkem procedury změny jízdního pruhu a začátkem manévru změny jízdního pruhu není kratší než 3,0 sekundy a není delší než 5,0 sekund; |
|
f) |
systém poskytuje řidiči informace, které mu signalizují, že probíhá procedura změny jízdního pruhu; |
|
g) |
manévr změny jízdního pruhu je dokončen za dobu kratší než 5 sekund u vozidel kategorií M1 a N1 a za dobu kratší než 10 sekund u vozidel kategorií M2, M3, N2 a N3; |
|
h) |
ACSF kategorie B1 obnoví automaticky svou činnost po ukončení manévru změny jízdního pruhu a |
|
i) |
ukazatel směru je vypnut nejdříve v okamžiku ukončení manévru změny jízdního pruhu a nejpozději za 0,5 sekundy poté, co činnost obnovila ACSF kategorie B1. |
3.5.1.3. Zkouška podle bodu 3.5.1.1 se musí zopakovat se změnou jízdního pruhu v opačném směru.
3.5.2. Zkouška s minimální rychlostí pro uvedení v činnost Vsmin
3.5.2.1. Zkouška s minimální rychlostí pro uvedení v činnost Vsmin musí vycházet z Vapp = 130 km/h.
Zkoušené vozidlo musí jet v jízdním pruhu přímé dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy a značení vozovky na obou stranách jízdního pruhu.
Vozidlo musí jet rychlostí Vsmin – 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje proceduru změny jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud manévr změny jízdního pruhu není vykonán.
3.5.2.2. Zkouška s minimální rychlostí pro uvedení v činnost Vsmin vycházející z obecného omezení maximální rychlosti v jednotlivých zemích pod 130 km/h.
V případě, kdy je Vsmin vypočtena na základě obecného omezení maximální rychlosti v jednotlivých zemích namísto Vapp = 130 km/h, jak je stanoveno v bodě 5.6.4.8.1, se musí vykonat dále uvedené zkoušky. Za tímto účelem je možné po dohodě mezi výrobcem vozidla a technickou zkušebnou simulovat zemi provozu.
3.5.2.2.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy a značení vozovky na obou stranách jízdního pruhu.
Vozidlo musí jet rychlostí Vsmin – 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje proceduru změny jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud manévr změny jízdního pruhu není vykonán.
3.5.2.2.2. Zkoušené vozidlo musí jet v jízdním pruhu přímé dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy a značení vozovky na obou stranách jízdního pruhu.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje proceduru změny jízdního pruhu.
Požadavky zkoušky jsou splněny, pokud je manévr změny jízdního pruhu vykonán.
3.5.2.2.3. Výrobce musí ke spokojenosti technické zkušebny prokázat, že vozidlo je schopno detekovat zemi provozu a že je známo obecné omezení maximální rychlosti v dotyčné zemi.
3.5.3. Zkouška překonání systému
3.5.3.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje změnu jízdního pruhu do sousedního pruhu.
Řidič pevně drží ovládací orgán řízení, aby udržel vozidlo v přímém směru.
Zaznamená se síla, kterou řidič působí na ovládací orgán řízení během manévru k překonání systému.
3.5.3.2. Požadavky zkoušky jsou splněny, pokud naměřená síla potřebná k překonání systému nepřekročí 50 N, jak je stanoveno ve výše uvedeném bodě 5.6.4.3.
3.5.3.3. Zkouška podle bodu 3.5.3.1 se musí zopakovat se změnou jízdního pruhu v opačném směru.
3.5.4. Zkouška potlačení procedury změny jízdního pruhu
3.5.4.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Řidič pak iniciuje proceduru změny jízdního pruhu.
Zkouška se musí zopakovat pro každou z následujících situací, ke kterým dojde před začátkem manévru změny jízdního pruhu:
|
a) |
systém je překonán řidičem; |
|
b) |
systém je vypnut řidičem; |
|
c) |
rychlost vozidla se snížila na Vsmin – 10 km/h; |
|
d) |
řidič sejmul ruce z ovládacího orgánu řízení a výstražná signalizace oznamující, že řidič nemá ruce na volantu, byla iniciována; |
|
e) |
směrové svítilny jsou ručně vypnuty řidičem; |
|
f) |
manévr změny jízdního pruhu nezačal do 5,0 sekund následujících po iniciování procedury změny jízdního pruhu (např. jiné vozidlo jede v sousedním jízdním pruhu v kritické situaci popsané v bodě 5.6.4.7). |
3.5.4.2. Požadavky zkoušky jsou splněny, pokud je procedura změny jízdního pruhu potlačena v každém z výše uvedených případů zkoušky.
3.5.5. Zkouška vlastností čidla
3.5.5.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim).
Jiné vozidlo se musí přibližovat zezadu v sousedním jízdním pruhu rychlostí 120 km/h.
Přibližujícím se vozidlem musí být typově schválený sériově vyráběný motocykl kategorie L3 se zdvihovým objemem motoru nepřesahujícím 600 cm3, bez aerodynamického krytu nebo čelního skla, a tento motocykl se musí snažit jet ve středu jízdního pruhu.
Měří se vzdálenost mezi zadním koncem zkoušeného vozidla a předním koncem přibližujícího se vozidla (např. diferenciálním globálním polohovým systémem) a hodnota změřená v okamžiku, kdy systém detekuje přibližující se vozidlo, se zaznamená.
3.5.5.2. Požadavky zkoušky jsou splněny, pokud systém detekuje přibližující se vozidlo nejpozději ve vzdálenosti deklarované výrobcem vozidla (Srear), jak je stanoveno ve výše uvedeném bodě 5.6.4.8.1.
3.5.6. Zkouška se zaslepeným čidlem
3.5.6.1. Zkoušené vozidlo musí jet v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
ACSF kategorie C musí být uvedena v činnost (pohotovostní režim) a zezadu se musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Přibližující se vozidlo pak musí zkoušené vozidlo úplně předjet.
Zadní snímač (snímače) se musí zaslepit prostředkem dohodnutým mezi výrobcem vozidla a technickou zkušebnou, který se zaznamená ve zkušebním protokolu. Tento úkon se může provést při stojícím vozidle, za podmínky, že se nevykoná žádný nový cyklus startování/běhu motoru.
Vozidlo musí jet rychlostí Vsmin + 10 km/h a řidič musí iniciovat proceduru změny jízdního pruhu.
3.5.6.2. Požadavky zkoušky jsou splněny, pokud systém:
|
a) |
detekuje zaslepení snímače; |
|
b) |
vydá řidiči výstražný signál podle bodu 5.6.4.8.4, a |
|
c) |
zabrání ve vykonání manévru změny jízdního pruhu. |
Kromě výše uvedené zkoušky musí výrobce ke spokojenosti technické zkušebny prokázat, že požadavky stanovené v bodě 5.6.4.8.4 jsou splněny rovněž u různých scénářů jízdy. Může tak učinit předložením příslušné dokumentace, kterou připojí ke zkušebnímu protokolu.
3.5.7. Zkouška s cyklem startování/běhu motoru
Zkouška je rozdělena do tří za sebou následujících fází, jak je uvedeno dále.
Vozidlo musí jet rychlostí Vsmin + 10 km/h.
3.5.7.1. Fáze 1 – Zkouška v režimu vypnuté standardní funkce
3.5.7.1.1. Poté, co řidič vykoná nový cyklus startování/běhu motoru, musí jet zkoušené vozidlo v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
ACSF kategorie C nesmí být uvedena v činnost (režim mimo činnost) a zezadu se musí přibližovat jiné vozidlo; přibližující se vozidlo musí zkoušené vozidlo úplně předjet.
Ukazatel směru, který se použije k iniciování procedury změny jízdního pruhu, musí být řidičem uveden v činnost na dobu delší než 5 sekund.
3.5.7.1.2. Požadavky zkušební fáze 1 jsou splněny, pokud manévr změny jízdního pruhu není iniciován.
3.5.7.2. Fáze 2
Cílem zkoušky je zkontrolovat, že systém zabrání ve vykonání manévru změny jízdního pruhu, pokud nedetekoval žádný pohybující se předmět ve vzdálenosti rovné nebo větší, než je vzdálenost Srear (jak je stanoveno v bodě 5.6.4.8.3).
3.5.7.2.1. Poté, co řidič vykoná nový cyklus startování/běhu motoru, musí jet zkoušené vozidlo v jízdním pruhu přímé zkušební dráhy, která má nejméně dva jízdní pruhy v tomtéž směru jízdy, se značeními vozovky na obou stranách jízdních pruhů.
ACSF kategorie C musí být ručně uvedena v činnost (pohotovostní režim).
Řidič pak iniciuje proceduru změny jízdního pruhu.
3.5.7.2.2. Požadavky zkušební fáze 2 jsou splněny, pokud manévr změny jízdního pruhu nebyl zahájen (jelikož není splněna podmínka stanovená v bodě 5.6.4.8.3).
3.5.7.3. Fáze 3 – Zkouška podmínek umožňujících vykonání změny jízdního pruhu
Cílem zkoušky je zkontrolovat, že vykonání manévru změny jízdního pruhu je možné jen tehdy, pokud systém detekoval pohybující se předmět ve vzdálenosti rovné nebo větší, než je vzdálenost Srear (jak je stanoveno v bodě 5.6.4.8.3).
3.5.7.3.1. Po ukončení zkušební fáze 2 se zezadu v sousedním jízdním pruhu musí přibližovat jiné vozidlo, aby došlo ke spuštění systému, jak je stanoveno ve výše uvedeném bodě 5.6.4.8.3.
Měří se vzdálenost mezi zadním koncem zkoušeného vozidla a předním koncem přibližujícího se vozidla (např. diferenciálním globálním polohovým systémem) a hodnota změřená v okamžiku, kdy systém detekuje přibližující se vozidlo, se zaznamená.
Poté, co zezadu se přibližující vozidlo úplně předjede zkoušené vozidlo, musí řidič iniciovat proceduru změny jízdního pruhu.
3.5.7.3.2. Požadavky zkušební fáze 3 jsou splněny, pokud:
|
a) |
manévr změny jízdního pruhu je vykonán; |
|
b) |
přibližující se vozidlo je detekováno nejpozději ve vzdálenosti určené výrobcem vozidla (Srear). |