(EHK/OSN) č. 13Změny předpisu Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 13 – Jednotná ustanovení pro schvalování vozidel kategorií M, N a O z hlediska brzdění
| Publikováno: | Úř. věst. L 297, 13.11.2010, s. 183-219 | Druh předpisu: | Nařízení |
| Přijato: | 13. listopadu 2010 | Autor předpisu: | |
| Platnost od: | 22. července 2009 | Nabývá účinnosti: | 22. července 2009 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
Pouze původní texty EHK/OSN mají podle mezinárodního veřejného práva právní účinek. Je zapotřebí ověřit si status a datum vstupu tohoto předpisu v platnost v nejnovější verzi dokumentu EHK/OSN o statusu TRANS/WP.29/343, který je k dispozici na internetové adrese:
http://www.unece.org/trans/main/wp29/wp29wgs/wp29gen/wp29fdocstts.html
Změny předpisu Evropské hospodářské komise Organizace spojených národů (EHK/OSN) č. 13 – Jednotná ustanovení pro schvalování vozidel kategorií M, N a O z hlediska brzdění
Série změn 11
Změna předpisu č. 13 zveřejněného v Úř. věst. L 257 ze dne 30. září 2010, s. 1.
Zahrnuje:
|
|
sérii změn 11 – datum vstupu v platnost: 11. července 2008 |
|
|
revizi 6 – změnu 1 – opravu 1 |
|
|
revizi 6 – změnu 1 – opravu 2 |
|
|
doplněk 1 k sérii změn 11 – datum vstupu v platnost: 22. července 2009 |
|
|
doplněk 2 k sérii změn 11 – datum vstupu v platnost: 24. října 2009 |
|
|
opravu 2 k sérii změn 11 – datum vstupu v platnost: 24. června 2009 |
|
|
doplněk 3 k sérii změn 11 – datum vstupu v platnost: 17. března 2010 |
Změny v obsahu
Název přílohy 16 se nahrazuje tímto:
|
„Příloha 16 – |
Kompatibilita mezi tažnými a přípojnými vozidly z hlediska sdělování dat podle normy ISO 11992“ |
Příloha 19 Vkládají se nové dodatky 7 a 8, které znějí:
|
|
Příloha 19 – Dodatek 7 – Informační dokument ke stabilitní funkci vozidla |
|
|
Příloha 19 – Dodatek 8 – Zkušební protokol ke stabilitní funkci vozidla |
Dosavadní dodatky 7 a 8 mají nyní čísla 9 a 10.
Vkládá se nová příloha 21
|
„Příloha 21 – |
Zvláštní požadavky na vozidla vybavená stabilitní funkcí vozidla Příloha 21 – Dodatek 1 – Použití simulace dynamické stability Příloha 21 – Dodatek 2 – Simulační nástroj dynamické stability a ověření jeho správnosti Příloha 21 – Dodatek 3 – Zkušební protokol k simulačnímu nástroji stabilitní funkce vozidla“ |
Změny v samotném textu předpisu
V celém textu předpisu č. 13 se odkaz na normu „ISO 11992:2003“ nahrazuje odkazem „ISO 11992:2003 včetně ISO 11992-2:2003 a její změny 1:2007“.
Přidávají se nové body 2.34 až 2.36, které znějí:
|
„2.34 |
„Stabilitní funkcí vozidla“ se rozumí elektronická řídící funkce vozidla, která zlepšuje dynamickou stabilitu vozidla.
|
|
2.35 |
„Uvažovaným přípojným vozidlem“ se rozumí přípojné vozidlo, které reprezentuje typ přípojného vozidla, pro jehož typ se žádá o schválení. |
|
2.36 |
„Faktorem vnitřního převodu brzdy (BF)“ se rozumí poměr výstupního brzdného momentu k momentu na vstupu brzdy.“ |
V bodě 4.2 se text „(nyní 10)“ nahrazuje textem „(nyní 11)“.
Vkládá se nový bod, 5.1.3.6.1, který zní:
|
„5.1.3.6.1 |
Předávání a přijímání zpráv definovaných v normě ISO 11992-2:2003 a její změně 1:2007 v případě tažného nebo přípojného vozidla je specifikováno v příloze 16 tohoto předpisu.“ |
Dosavadní body 5.1.3.6.1 a 5.1.3.6.2 se nyní označují jako body 5.1.3.6.2 a 5.1.3.6.3.
V bodě 5.2.1.30.5 se odstraní odkaz na poznámku pod čarou (12) a poznámka pod čarou (12).
Přidává se nový bod 5.2.1.32, který zní (a obsahuje odkaz na novou poznámku pod čarou (12) a novou poznámku pod čarou (12):
|
‘5.2.1.32 |
S výhradou ustanovení bodu 12.4 tohoto předpisu musí být všechna vozidla kategorií M2, M3, N2 a N3 (1), která mají nejvýše 3 nápravy, vybavena stabilitní funkcí vozidla. Tato funkce musí obsahovat opatření proti převrácení a směrové řízení a musí splňovat technické požadavky přílohy 21 tohoto předpisu. |
Bod 5.2.2.17.1 se nahrazuje tímto (včetně odstranění poznámky pod čarou):
|
„5.2.2.17.1 |
Přípojná vozidla, která jsou vybavena stabilitní funkcí vozidla definovanou v bodě 2.34 tohoto předpisu, musí v případě poruchy nebo závady ve stabilitní funkci přípojného vozidla signalizovat poruchu nebo závadu zvláštním výstražným signálem se žlutým světlem, který je specifikován v bodě 5.2.1.29.2 a který je vyvolán přes pól 5 konektoru ISO 7638:2003. Výstražný signál musí být stálý a musí svítit tak dlouho, dokud porucha nebo závada trvá a spínač zapalování (startování) je v poloze „zapnuto“ (běh motoru).“ |
V bodě 5.2.2.22.1 se odstraní odkaz na poznámku pod čarou (19) a poznámka pod čarou (19).
V bodě 5.2.2.22.2 má nyní odkaz na poznámku pod čarou číslo (19) a poznámka pod čarou číslo (19) a odkaz na poznámku pod čarou (21) a poznámka pod čarou (21) se odstraní.
Přidává se nový bod 5.2.2.23, který zní (a obsahuje odkaz na novou poznámku pod čarou (20) a novou poznámku pod čarou (20)):
|
‘5.2.2.23 |
S výhradou ustanovení bodu 12.4 tohoto předpisu musí být všechna vozidla kategorií O3, a O4 (2), která mají nejvýše 3 nápravy a jsou vybavena vzduchovým odpružením, vybavena stabilitní funkcí vozidla. Tato funkce musí obsahovat alespoň opatření proti převrácení a splňovat technické požadavky přílohy 21 tohoto předpisu. |
Přidává se nový bod 12.1.6, který zní (včetně poznámky pod čarou (21)):
|
‘12.1.6 |
Počínaje úředním datem vstupu série změn 11 v platnost žádná ze smluvních stran uplatňujících tento předpis neodmítne udělit schválení typu podle tohoto předpisu ve znění série změn 11. (3) |
Přidává se nový bod 12.1.7, který zní:
|
„12.1.7 |
Doplněk 1 k sérii změn 11 tohoto předpisu se použije v souladu s bodem 12.4.1.“ |
Přidává se nový bod 12.1.8, který zní:
|
„12.1.8 |
Počínaje úředním datem vstupu doplňku 2 série změn 11 tohoto předpisu v platnost žádná ze smluvních stran uplatňujících tento předpis neodmítne udělit schválení typu podle tohoto předpisu ve znění doplňku 2 série změn 11.“ |
Přidává se nový bod 12.2.6, který zní:
|
„12.2.6 |
Po uplynutí 48 měsíců od vstupu doplňku 1 k sérii změn 11 tohoto předpisu v platnost udělí smluvní strany schválení typu vozidlům, kterým body 5.2.1.32 a 5.2.2.23, včetně poznámek pod čarou, udělují výjimku, pouze pokud tato vozidla splňují požadavky doplňku 1 k sérii změn 11 tohoto předpisu.“ |
Přidává se nový bod 12.2.7, který zní:
|
„12.2.7 |
Po uplynutí 48 měsíců od vstupu doplňku 2 k sérii změn 11 tohoto předpisu v platnost udělí smluvní strany uplatňující tento předpis schválení typu pouze, pokud typ vozidla, který má být schválen, splňuje požadavky tohoto předpisu ve znění doplňku 2 k sérii změn 11 tohoto předpisu.“ |
Přidává se nový bod 12.3.2, který zní:
|
„12.3.2 |
Po uplynutí 84 měsíců od vstupu doplňku 2 série změn 11 tohoto předpisu v platnost mohou smluvní strany uplatňující tento předpis zamítnout první vnitrostátní registraci (první uvedení do provozu) vozidla, které nesplňuje požadavky doplňku 2 série změn 11 tohoto předpisu.“ |
Přidává se nový bod 12.4, který zní (včetně poznámky (22)):
‘12.4 Povinná ustanovení pro vozidla vybavená stabilitní funkcí vozidla
|
12.4.1 |
Požadavky na vybavení vozidel se stabilitní funkcí vozidla, jak uvádí body 5.2.1.32 a 5.2.2.23 tohoto předpisu ve znění série změn 11, se použijí takto:
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Dosavadní body 12.4 a 12.14.1 mají nyní čísla 12.5 a 12.5.1.
Změny přílohy 2
Do přílohy 2 se přidávají nové položky, 14.14 a 14.14.1, které znějí:
|
‘14.14 |
Vozidlo je vybaveno stabilitní funkcí vozidla: |
ano/ne (2) |
|
Pokud ano: … |
|
|
|
stabilitní funkce vozidla byla podrobena zkoušce v souladu s požadavky přílohy 21 a tyto požadavky splňuje: |
ano/ne (2) |
|
|
stabilitní funkce vozidla je volitelným vybavením: |
ano/ne (2) |
|
|
stabilitní funkce vozidla obsahuje směrové řízení: |
ano/ne (2) |
|
|
stabilitní funkce vozidla obsahuje opatření proti převrácení: |
ano/ne (2) |
|
|
14.14.1 |
Jestliže byl použit zkušební protokol podle přílohy 19, uvede se číslo tohoto protokolu: …’ |
|
Změny přílohy 10
Příloha 10, bod 1.3.1, poznámka pod čarou (2) se nahrazuje tímto:
|
„(2) |
V případě skupin náprav, u nichž je rozvor mezi jednou nápravou a její sousední nápravou větší než 2,0 m, se posuzuje každá jednotlivá náprava jako nezávislá skupina náprav.“ |
Změny přílohy 11
Příloha 11
Bod 2 se nahrazuje tímto:
|
„2. |
Termínem „identický“, použitým v bodech 1.1, 1.2 a 1.3, se rozumí identický z hlediska geometrických a mechanických vlastností a materiálů částí vozidla, které jsou předmětem těchto bodů. V případě přípojných vozidel se pokládají tyto požadavky za splněné z hlediska výše uvedených bodů 1.1 a 1.2, jestliže identifikátory uvedené v bodě 3.7 dodatku 2 této přílohy pro nápravu/brzdu uvažovaného přípojného vozidla jsou uvedeny ve zkušebním protokolu k referenční nápravě/brzdě. „Referenční náprava/brzda“ je náprava/brzda, pro kterou existuje zkušební protokol uvedený v bodě 3.9 dodatku 2 této přílohy.“ |
Příloha 11 - Dodatek 1
Tabulka I se nahrazuje tímto (včetně poznámky (1)):
|
|
‘Nápravy vozidla |
Referenční nápravy |
||||
|
Statická hmotnost (P) (5) |
Brzdná síla potřebná na kolech |
Rychlost |
Hmotnost při zkoušce (Pe) (5) |
Brzdná síla vyvinutá na kolech |
Rychlost |
|
|
kg |
N |
km/h |
kg |
N |
km/h |
|
|
Náprava 1 |
|
|
|
|
|
|
|
Náprava 2 |
|
|
|
|
|
|
|
Náprava 3 |
|
|
|
|
|
|
|
Náprava 4 |
|
|
|
|
|
|
V tabulce III se třetí řádek nahrazuje tímto (včetně odstranění poznámky pod čarou (2)):
|
|
‘REFERENČNÍ … (kopie přiložena) |
|
|
PROTOKOL Č. … |
|
|
Datum … |
|
|
Typ I |
Typ III |
|
Brzdná síla na nápravu (N) (viz bod 4.2.1 dodatek 2) |
|
|
|
Náprava 1 |
T1 = … % Fe |
T1 = … % Fe |
|
Náprava 2 |
T2 = … % Fe |
T2 = … % Fe |
|
Náprava 3 |
T3 = … % Fe |
T3 = … % Fe |
|
… |
… |
…’ |
Příloha 11 – Dodatek 2
Vkládá se nový bod 1.2.2, který zní:
|
„1.2.2 |
Zkoušky provedené v souladu s tímto dodatkem ve znění předcházejícím doplněk 2 k sérii změn 11 tohoto předpisu, které zároveň se všemi podpůrnými údaji od výrobce vozidla/nápravy/brzdy poskytují dostatek informací ohledně splnění požadavků doplňku 2 k sérii změn 11, se mohou použít pro nový zkušební protokol nebo k rozšíření stávajícího zkušebního protokolu, aniž by bylo potřebné provést skutečné zkoušky.“ |
Bod 2 se nahrazuje tímto:
„2. SYMBOLY A DEFINICE
2.1 Symboly
|
P |
= |
část hmotnosti vozidla nesená nápravou za statických podmínek |
|
F |
= |
normálová statická reakce povrchu vozovky ve styku s koly nápravy za statických podmínek = P · g |
|
FR |
= |
celková normálová statická reakce povrchu vozovky působící na všechna kola přípojného vozidla |
|
Fe |
= |
zatížení působící na zkoušenou nápravu |
|
Pe |
= |
Fe / g |
|
g |
= |
tíhové zrychlení: g = 9,81 m/s2 |
|
C |
= |
vstupní brzdný moment |
|
C0 |
= |
prahová hodnota vstupního brzdného momentu, definice viz bod 2.2.2 |
|
C0,dec |
= |
deklarovaná prahová hodnota vstupního brzdného momentu |
|
Cmax |
= |
deklarovaný maximální vstupní brzdný moment |
|
R |
= |
poloměr valení pneumatiky (dynamický) |
|
T |
= |
brzdná síla v místě styku pneumatiky s vozovkou |
|
TR |
= |
celková brzdná síla ve styku pneumatiky s vozovkou u přípojného vozidla |
|
M |
= |
brzdný moment = T · R |
|
z |
= |
poměrná brzdná síla = T/F nebo M/(R·F) |
|
s |
= |
zdvih pístnice brzdového válce (užitečný zdvih + zdvih naprázdno) |
|
sp |
= |
viz příloha 19 – dodatek 9 |
|
ThA |
= |
viz příloha 19 – dodatek 9 |
|
l |
= |
délka páky klíče |
|
r |
= |
vnitřní poloměr brzdových bubnů nebo účinný poloměr brzdových kotoučů |
|
P |
= |
tlak v brzdovém válci |
Poznámka: Symboly s indexem „e“ se vztahují k parametrům týkajícím se zkoušek referenční brzdy a tento index se může podle potřeby připojit k jiným symbolům.
2.2 Definice
2.2.1 Hmotnost kotouče nebo bubnu
|
2.2.1.1 |
„Deklarovanou hmotností“ se rozumí hmotnost deklarovaná výrobcem, která je reprezentativní hmotností pro identifikátor brzdy (viz bod 3.7.2.2 tohoto dodatku). |
|
2.2.1.2 |
„Jmenovitou zkušební hmotností“ se rozumí hmotnost, kterou výrobce stanoví pro kotouč nebo buben a s níž technická zkušebna provede příslušnou zkoušku. |
|
2.2.1.3 |
„Skutečnou hmotností při zkoušce“ se rozumí hmotnost, kterou změří technická zkušebna před zkouškou. |
2.2.2 „Prahová hodnota vstupního brzdného momentu“:
|
2.2.2.1 |
Prahová hodnota vstupního brzdného momentu „C0“ je vstupní moment potřebný k vyvinutí měřitelného brzdného momentu Tento moment se může určit extrapolací měřených hodnot v rozsahu nepřesahujícím 15 % poměrné brzdné síly, nebo jinou rovnocennou metodou (např. příloha 10, bod 1.3.1.1). |
|
2.2.2.2 |
Prahová hodnota vstupního brzdného momentu „C0,dec“ je prahová hodnota vstupního brzdného momentu deklarovaná výrobcem, která je reprezentativní prahovou hodnotou vstupního momentu brzdy (viz bod 3.7.2.2.1 tohoto dodatku) a je potřebná k sestrojení diagramu 2 v příloze 19. |
|
2.2.2.3 |
Prahová hodnota vstupního brzdného momentu „C0,e“ se určí postupem stanoveným v bodě 2.2.2.1 a je změřena technickou zkušebnou na konci zkoušky. |
2.2.3 „Vnější průměr kotouče“:
|
2.2.3.1 |
„Deklarovaným vnějším průměrem“ se rozumí vnější průměr kotouče deklarovaný výrobcem, který je reprezentativním vnějším průměrem kotouče (viz bod 3.7.2.2.1 tohoto dodatku). |
|
2.2.3.2 |
„Jmenovitým vnějším průměrem“ se rozumí vnější průměr, který výrobce stanoví pro kotouč, s nímž technická zkušebna provede příslušnou zkoušku. |
|
2.2.3.3 |
„Skutečným vnějším průměrem“ se rozumí vnější průměr, který změří technická zkušebna před zkouškou. |
2.2.4 „Účinná délka hřídele klíče“ je vzdálenost mezi střednicí S-klíče a střednicí páky klíče.“
Bod 3.4 se nahrazuje tímto:
„3.4 Podmínky při zkoušce (všeobecně)“
Body 3.7 až 3.7.3 se odstraní.
Vkládají se nové body 3.7 až 3.9.4, které znějí:
„3.7 Identifikace
3.7.1 Na nápravě musí být na viditelném místě, čitelně a nesmazatelně vyznačeny alespoň následující identifikační údaje, seskupené v jakémkoli pořadí:
|
a) |
Výrobce nápravy a/nebo značka; |
|
b) |
Identifikátor nápravy (viz bod 3.7.2.1 tohoto dodatku); |
|
c) |
Identifikátor brzdy (viz bod 3.7.2.2 tohoto dodatku); |
|
d) |
Identifikátor Fe (viz bod 3.7.2.3 tohoto dodatku); |
|
e) |
Základní část čísla zkušebního protokolu (viz bod 3.9 tohoto dodatku). |
Například:
|
|
|
|
|
|
|
|
|
|
3.7.1.1 Na neintegrovaném automatickém seřizovacím zařízení brzdy musí být čitelně a nesmazatelně vyznačeny seskupené alespoň následující identifikační údaje:
|
a) |
výrobce a/nebo značka; |
|
b) |
typ; |
|
c) |
verze. |
3.7.1.2 Když je na čelisti/destičce namontováno obložení, musí údaj o značce a typu každého brzdového obložení zůstat viditelný, čitelný a nesmazatelný.
3.7.2 Identifikátory
3.7.2.1 Identifikátor nápravy
Identifikátor nápravy udává kategorii nápravy vyjádřením její dosažitelné brzdné síly/momentu podle prohlášení výrobce.
Identifikátorem nápravy je alfanumerický kód, který se skládá ze čtyř znaků „ID1–“, za nimiž následuje nejvýše 20 znaků.
3.7.2.2 Identifikátor brzdy
Identifikátorem brzdy je alfanumerický kód, který se skládá ze čtyř znaků „ID2–“, za nimiž následuje nejvýše 20 znaků.
Brzdami se stejným identifikátorem jsou brzdy, které se neliší z hlediska následujících kritérií:
|
a) |
druh brzdy (např. bubnová (s S-klíčem, rozpěracím klínem atd.) nebo kotoučová (s pevným nebo plovoucím třmenem, s jednoduchým nebo dvojitým kotoučem atd.)); |
|
b) |
základní materiál (např. železný nebo neželezný), z něhož je zhotoven nosič třmenu, nosič brzdy, brzdový kotouč a brzdový buben; |
|
c) |
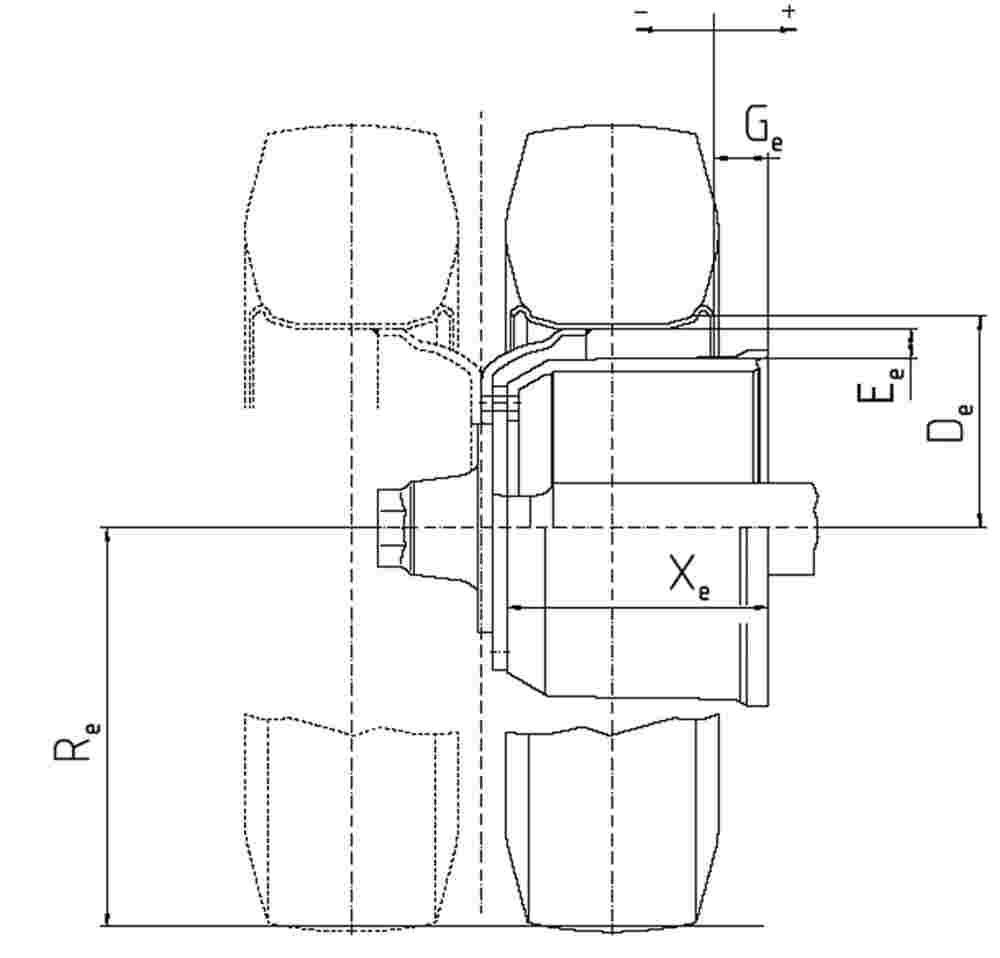
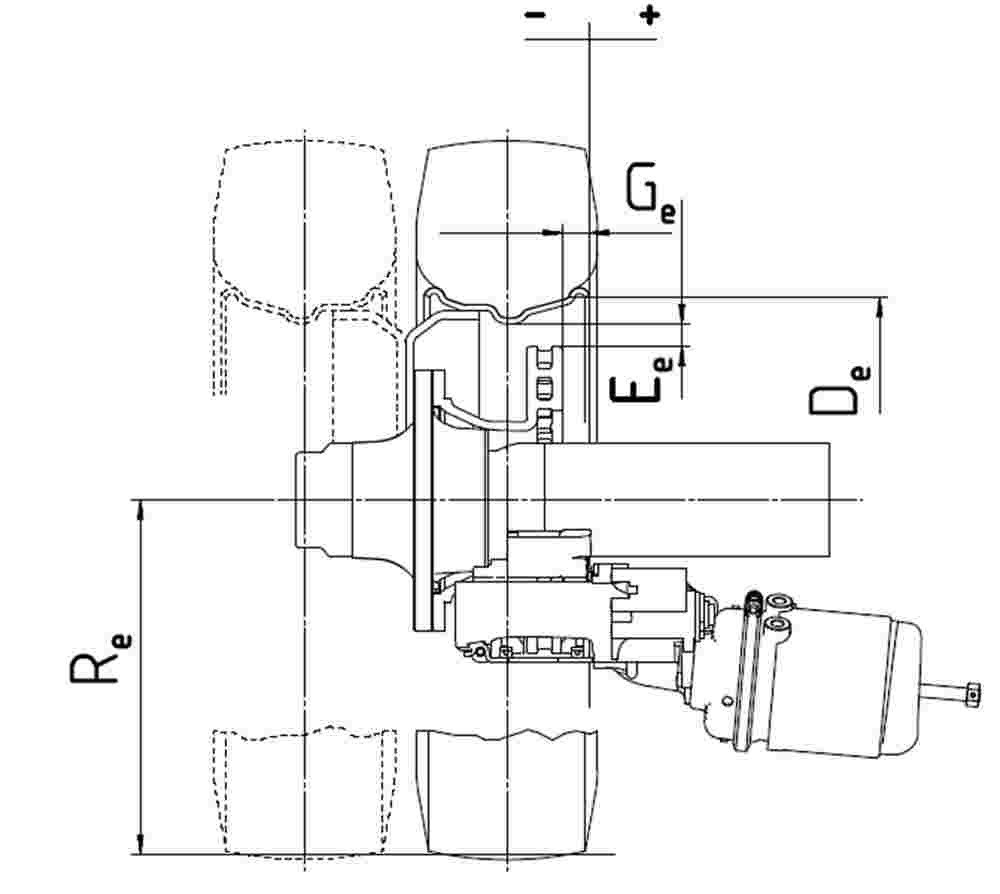
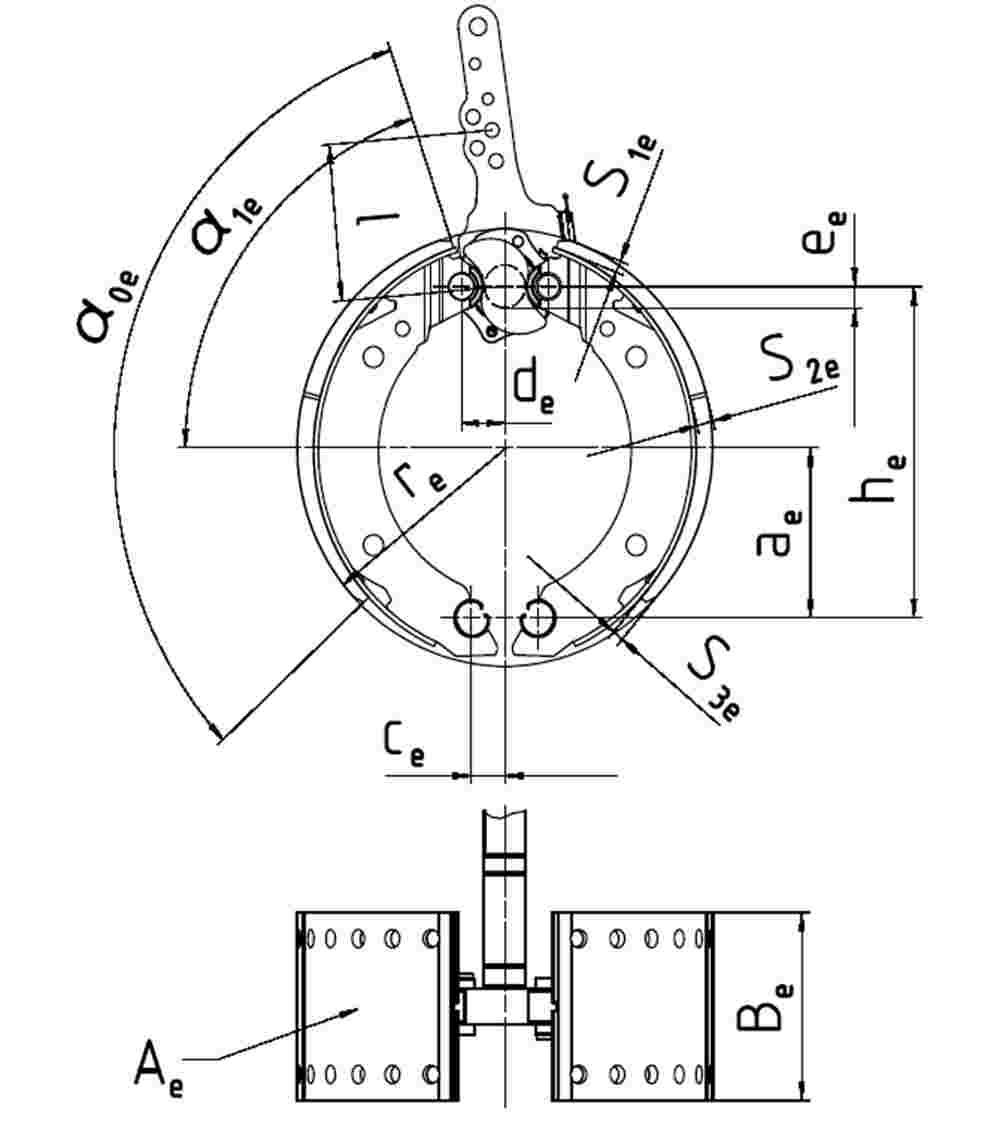
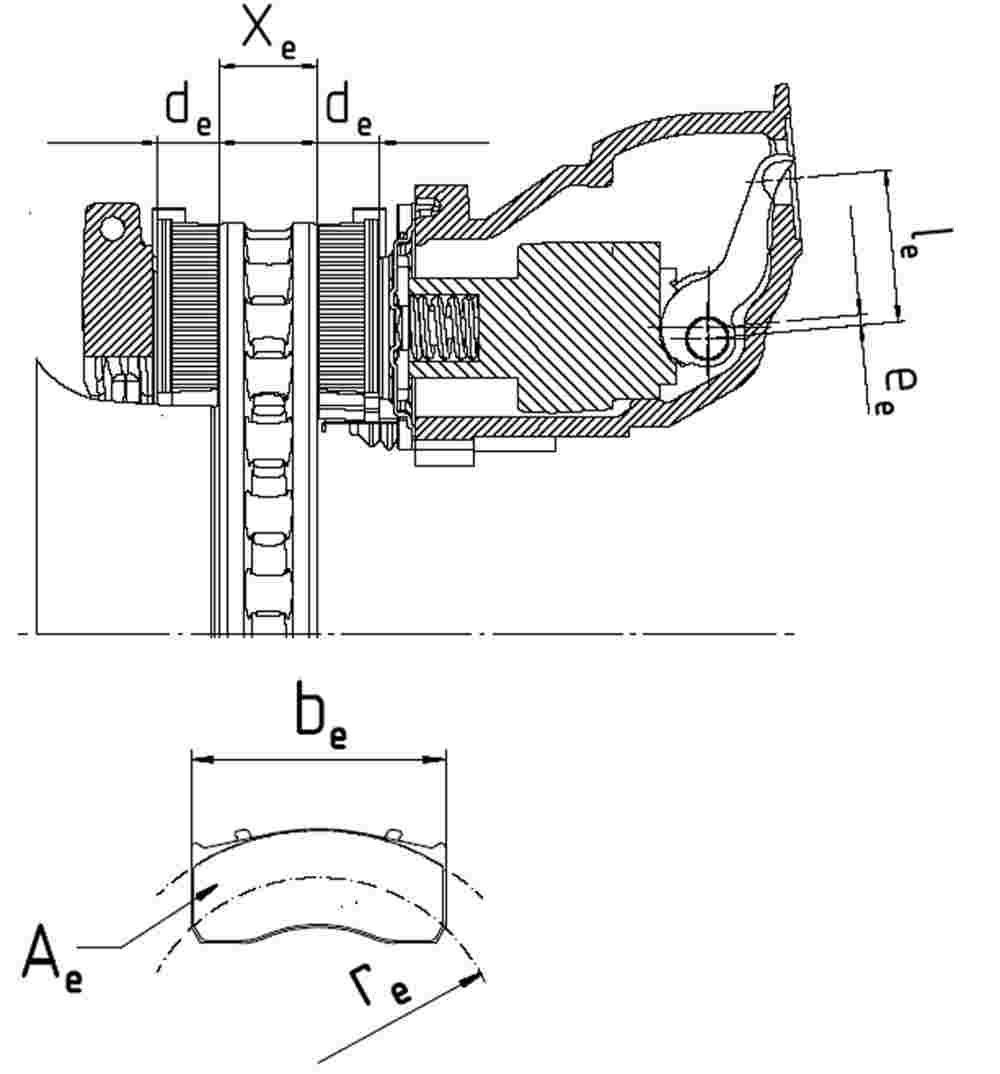
rozměry označené indexem „e“ podle obrázku 2A a 2B dodatku 5 této přílohy; |
|
d) |
základní způsob, kterým brzda generuje brzdnou sílu; |
|
e) |
u kotoučových brzd způsob uchycení třecího prstence: pevně nebo plovoucím způsobem; |
|
f) |
faktor vnitřního převodu brzdy BF; |
|
g) |
různé charakteristiky brzdy týkající se požadavků přílohy 11, na něž se nevztahuje bod 3.7.2.2.1. |
3.7.2.2.1 Rozdíly, které jsou přípustné v rámci téhož identifikátoru brzdy
Tentýž identifikátor brzdy může zahrnovat rozdílné vlastnosti brzdy z hlediska následujících kritérií:
|
a) |
zvětšení maximálního deklarovaného vstupního brzdného momentu Cmax; |
|
b) |
odchylka od deklarované hodnoty hmotnosti brzdového kotouče a brzdového bubnu mdec: ±20 procent; |
|
c) |
způsob připevnění obložení k brzdové čelisti/destičce; |
|
d) |
u kotoučových brzd zvětšení maximálního zdvihu v brzdě; |
|
e) |
účinná délka hřídele klíče; |
|
f) |
deklarovaná prahová hodnota momentu C0,dec; |
|
g) |
odchylka ±5 mm od deklarovaného vnějšího průměru kotouče; |
|
h) |
druh chlazení kotouče (větraný, nevětraný); |
|
i) |
náboj kola (integrovaný nebo neintegrovaný); |
|
j) |
kotouč s integrovaným bubnem – s funkcí parkovací brzdy nebo bez ní; |
|
k) |
geometrický vztah mezi třecími plochami kotouče a uchycením kotouče; |
|
l) |
typ brzdového obložení; |
|
m) |
rozdíly v materiálech (s výjimkou změn základního materiálu, viz bod 3.7.2.2), u nichž výrobce potvrzuje, že tyto rozdíly nemění vlastnosti z hlediska požadovaných zkoušek; |
|
n) |
štít brzdy a čelisti. |
3.7.2.3 Identifikátor Fe
Identifikátor Fe udává zatížení zkoušené nápravy. Je to alfanumerický kód, který se skládá ze čtyř znaků „ID3–“, za nimiž následuje hodnota Fe v daN, avšak bez znaků vyjadřujících jednotku „daN“.
3.7.2.4 Identifikátor zkušebního protokolu
Identifikátorem zkušebního protokolu je alfanumerický kód, který se skládá ze čtyř znaků „ID4–“, za nimiž následuje základní část čísla zkušebního protokolu.
3.7.3 Automatické seřizovací zařízení brzdy (integrované nebo neintegrované)
3.7.3.1 Typy automatického seřizovacího zařízení brzdy
Tentýž typ automatického seřizovacího zařízení brzdy se nesmí lišit z hlediska následujících kritérií:
|
a) |
těleso: základní materiál (např. železný nebo neželezný, litina nebo kovaná ocel); |
|
b) |
maximální přípustný moment na hřídeli brzdy; |
|
c) |
pracovní princip seřizování, např. závisející na zdvihu (posuvu), závisející na síle nebo elektronický/mechanický. |
3.7.3.2 Verze automatického seřizovacího zařízení brzdy z hlediska vlastností při seřizování
Automatické seřizovací zařízení brzdy v rámci jednoho typu, která vytvářejí rozdílnou velikost provozní vůle v brzdě, se pokládají za rozdílné verze.
3.8 Kritéria zkoušky
Zkouška musí prokázat splnění všech požadavků stanovených v dodatku 2 této přílohy.
V případě, že se požaduje pro nápravu/brzdu upravenou v mezích stanovených v bodě 3.7.2.2.1 nový zkušební protokol, nebo jeho rozšíření, použijí se k určení nutnosti dalších zkoušek následující kritéria, přičemž se bere v úvahu případ nejnepříznivější konfigurace podle dohody s technickou zkušebnou.
|
Níže uvedené zkratky jsou použity v následující tabulce: |
|||||||||
|
ÚZ (úplná zkouška) |
Zkouška podle přílohy 11, dodatku 2:
Zkouška podle přílohy 19:
|
||||||||
|
ZS (zkouška slábnutí brzdného účinku) |
Zkouška podle přílohy 11, dodatku 2:
|
||||||||
|
Rozdíly podle bodu 3.7.2.2.1 výše |
Kritéria zkoušky |
||||||
|
Změna je přípustná bez doplňkové zkoušky |
||||||
|
ÚZ: Zkouší se nejlehčí varianta. Jestliže se jmenovitá zkušební hmotnost nové varianty liší o méně než 5 % od dříve zkoušené varianty s větší jmenovitou hodnotou, pak se od zkoušky lehčí verze může upustit. Skutečná hmotnost při zkoušce zkušebního vzorku se může od jmenovité zkušební hmotnosti lišit o ±5 %. |
||||||
|
Nejnepříznivější případ specifikovaný výrobcem a odsouhlasený technickou zkušebnou, která provádí zkoušku. |
||||||
|
Změna je přípustná bez doplňkové zkoušky |
||||||
|
Za nejnepříznivější případ se pokládá nejmenší torzní tuhost hřídele, která se ověří jedním z těchto způsobů:
|
||||||
|
Musí se ověřit, že brzdný účinek zůstane v mezích znázorněných na diagramu 2 v příloze 19. |
||||||
|
Za nejnepříznivější případ se pokládá nejmenší průměr. Skutečný vnější průměr zkušebního vzorku se smí lišit od jmenovitého vnějšího průměru specifikovaného výrobcem nápravy o ± 1 mm. |
||||||
|
Zkouší se každý druh. |
||||||
|
Zkouší se každý druh. |
||||||
|
Pro tento případ se zkouška nepožaduje. |
||||||
|
Pro tento případ se zkouška nepožaduje. |
||||||
|
Zkouška se požaduje pro všechny typy obložení. |
||||||
|
Pro tento případ se zkouška nepožaduje. |
||||||
|
Podmínky, při nichž nastane nejnepříznivější případ: (7) Štít brzdy: nejmenší tloušťka Čelist: nejlehčí brzdová čelist |
|
3.8.1 |
Jestliže se automatické seřizovací zařízení brzdy liší od zkoušeného zařízení z hlediska bodů 3.7.3.1 a 3.7.3.2, je nutné provést doplňující zkoušku podle bodu 3.6.2 tohoto dodatku. |
3.9 Zkušební protokol
3.9.1 Číslo zkušebního protokolu
Číslo zkušebního protokolu se skládá ze dvou částí: ze základní části a z připojené části, která identifikuje úroveň předmětu zkušebního protokolu.
Základní část, která má nejvýše 20 znaků, musí být zřetelně oddělena od připojené části, např. tečkou nebo lomítkem.
Základní část čísla zkušebního protokolu se týká jen brzd se stejným identifikátorem brzdy a se stejným faktorem vnitřního převodu brzy (podle bodu 4 přílohy 19 tohoto předpisu).
3.9.2 Kód zkoušky
Kromě čísla zkušebního protokolu udává „kód zkoušky“, který má nejvýše osm znaků (např. ABC123), výsledky zkoušky použitelné pro identifikátory a zkušební vzorek, jak jsou podrobně popsány výše v bodě 3.7.
3.9.3 Výsledky zkoušky
|
3.9.3.1 |
Výsledky zkoušek provedených podle bodů 3.5 a 3.6.1 tohoto dodatku musí být uvedeny ve formuláři, jehož vzor je uveden v dodatku 3 k této příloze. |
|
3.9.3.2 |
V případě brzdy, na které je namontováno alternativní seřizovací zařízení brzdy, se výsledky zkoušek provedených podle bodu 3.6.2 tohoto dodatku uvedou ve formuláři, jehož vzor je uveden v dodatku 4 k této příloze. |
3.9.4 Informační dokument
Součástí zkušebního protokolu musí být informační dokument dodaný výrobcem nápravy nebo vozidla, který obsahuje alespoň informace uvedené v dodatku 5 k této příloze.
Informační dokument musí identifikovat, jestliže je to třeba, různé varianty vybavení brzdy/nápravy z hlediska hlavních kritérií uvedených v bodě 3.7.2.2.1.“
Bod 4.1 se nahrazuje tímto:
„4.1 Ověření částí brzd
Specifikace brzd vozidla, pro jehož typ se žádá schválení, musí splňovat požadavky stanovené výše v bodech 3.7 a 3.8.“
Body 4.1.1 až 4.1.7 se odstraní.
Vzorec v bodě 4.3.1.4 se nahrazuje tímto:

Vzorec v bodě 4.3.2 se nahrazuje tímto:

Příloha 11 – Dodatek 3
se nahrazuje tímto (včetně odstranění čísel 1A, 1B, 2A a 2B):
„DODATEK 3
Vzor formuláře zkušebního protokolu stanoveného v bodě 3.9 Dodatku 2 k této Příloze
ZKUŠEBNÍ PROTOKOL č.: …
|
|
Základní část: ID4- … |
|
|
Připojená část … |
1. OBECNĚ
|
1.1 |
Výrobce nápravy (název a adresa): … |
|
1.1.1 |
Značka výrobce nápravy: … |
|
1.2 |
Výrobce brzdy (název a adresa): … |
|
1.2.1 |
Identifikátor brzdy: ID2-… |
|
1.2.2 |
Automatické seřizovací zařízení brzdy: integrované/neintegrované (8): |
|
1.3 |
Informační dokument výrobce: … |
2. ÚDAJE ZAZNAMENANÉ PŘI ZKOUŠCE
U každé zkoušky musí být zaznamenány tyto údaje:
|
2.1 |
Kód zkoušky (viz bod 3.9.2 dodatku 2 této přílohy): … |
|
2.2 |
Zkušební vzorek: (přesná identifikace zkoušené varianty v souvislosti s informačním dokumentem výrobce. Viz též bod 3.9.2 dodatku 2 této přílohy) |
|
2.2.1. |
Náprava |
|
2.2.1.1 |
Identifikátor nápravy: ID1-… |
|
2.2.1.2 |
Identifikace zkoušené nápravy: … |
|
2.2.1.3 |
Zatížení zkoušené nápravy (identifikátor Fe): ID3-… daN |
|
2.2.2. |
Brzda |
|
2.2.2.1 |
Identifikátor brzdy: ID2-… |
|
2.2.2.2 |
Identifikace zkoušené brzdy: … |
|
2.2.2.3 |
Maximální zdvih v brzdě (9): … |
|
2.2.2.4 |
Účinná délka hřídele klíče (10): … |
|
2.2.2.5 |
Rozdíly v materiálech podle bodu 3.8 písm. m) dodatku 2 této přílohy: … |
|
2.2.2.6 |
Brzdový buben/kotouč (8) |
|
2.2.2.6.1 |
Skutečná hmotnost kotouče/bubnu při zkoušce (8): … |
|
2.2.2.6.2 |
Jmenovitý vnější průměr kotouče (9): … |
|
2.2.2.6.3 |
Druh chlazení kotouče větraný/nevětraný (8): |
|
2.2.2.6.4 |
Integrovaný nebo neintegrovaný náboj kola (8): |
|
2.2.2.6.5 |
Kotouč s integrovaným bubnem – s funkcí parkovací brzdy nebo bez ní (8) (9): |
|
2.2.2.6.6 |
Geometrický vztah mezi třecími plochami kotouče a uchycením kotouče: … |
|
2.2.2.6.7 |
Základní materiál: … |
|
2.2.2.7 |
Brzdové obložení (8) |
|
2.2.2.7.1 |
Výrobce: … |
|
2.2.2.7.2 |
Značka: … |
|
2.2.2.7.3 |
Typ: … |
|
2.2.2.7.4 |
Způsob připevnění obložení k brzdové čelisti/destičce (8): … |
|
2.2.2.7.5 |
Tloušťka destičky, hmotnost čelistí nebo další popisné informace (informační dokument výrobce) (8): |
|
2.2.2.7.6 |
Základní materiál brzdové čelisti/destičky (8): … |
|
2.2.3 |
Automatické seřizovací zařízení (tato položka se nepoužije v případe automatického seřizovacího zařízení, které je integrováno do brzdy) (8) |
|
2.2.3.1 |
Výrobce (název a adresa): … |
|
2.2.3.2 |
Značka: … |
|
2.2.3.3 |
Typ: … |
|
2.2.3.4 |
Verze: … |
|
2.2.4 |
Kolo (kola) (rozměry viz obrázky 1A a 1B v dodatku 5 k této příloze) |
|
2.2.4.1 |
Referenční poloměr valení pneumatiky (Re) při zatížení zkoušené nápravy (Fe): … |
|
2.2.4.2 |
Údaje o kole namontovaném pro zkoušku:
|
|
2.2.5 |
Délka páky (le): … |
|
2.2.6 |
Brzdový válec |
|
2.2.6.1 |
Výrobce: … |
|
2.2.6.2 |
Značka: … |
|
2.2.6.3 |
Typ: … |
|
2.2.6.4 |
Identifikační číslo (zkoušky): … |
|
2.3 |
Výsledky zkoušek (korigované vzhledem k valivému odporu = 0,01 · Fe) |
|
2.3.1 |
Pro vozidla kategorií O2 a O3:
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.2 |
Pro vozidla kategorie O4
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2.3.3 |
Tato položka se vyplní jen tehdy, když se s brzdou vykonal postup zkoušky podle bodu 4 přílohy 19 tohoto předpisu, aby se ověřily vlastnosti brzdného účinku se studenými brzdami prostřednictvím faktoru vnitřního převodu brzdy (BF). |
|
2.3.3.1 |
Faktor vnitřního převodu brzdy BF: |
|
2.3.3.2 |
Deklarovaná prahová hodnota momentu C0,dec Nm |
|
2.3.4 |
Funkce automatického seřizovacího zařízení brzdy (připadá-li v úvahu) |
|
2.3.4.1 |
Volné otáčení kola podle bodu 3.6.3 přílohy 11, dodatku 2: ano/ne (8) |
3. OBLAST POUŽITÍ
Oblast použití specifikuje varianty nápravy/brzdy, na které se vztahuje tento zkušební protokol tím, že udává, které variabilní hodnoty jsou pokryty jednotlivými kódy zkoušek.
4. Tato zkouška byla provedena a výsledky byly uvedeny ve zkušebním protokolu podle dodatku 2 přílohy 11 a v příslušných případech podle bodu 4 přílohy 19 předpisu č. 13 naposledy změněného sérií změn …
Na konci zkoušky popsané v bodě 3.6 přílohy 11 dodatku 2 (11) bylo konstatováno, že požadavky bodu 5.2.2.8.1 předpisu č. 13 byly splněny / nebyly splněny (8).
TECHNICKÁ ZKUŠEBNA (12), KTERÁ PROVEDLA ZKOUŠKY
Podpis: … Datum: …
5. SCHVALOVACÍ ORGÁN (12)
Podpis: … Datum: …
V příloze 11 – dodatku 4
bodě 1.1 se položka „Technicky přípustné zatížení nápravy (Pe)“ nahrazuje položkou „Zatížení zkoušené nápravy (identifikátor Fe)“. ID3-“.
Přidává se nový dodatek 5 přílohy 11, který zní:
„DODATEK 5
Informační dokument pro nápravu a brzdu přípojných vozidel k postupu zkoušky s ohledem na alternativu typu I nebo typu III
1. OBECNĚ
|
1.1 |
Název a adresa výrobce nápravy nebo vozidla: … |
2. ÚDAJE O NÁPRAVĚ
|
2.1 |
Výrobce (název a adresa): … |
|
2.2 |
Typ/varianta: … |
|
2.3 |
Identifikátor nápravy: ID1-… |
|
2.4 |
Zatížení zkoušené nápravy (Fe): … daN |
|
2.5 |
Údaje o kole a brzdě podle následujících obrázků 1A a 1B Obrázek 1A
Obrázek 1B
|
3. BRZDA
|
3.1 |
Obecné informace |
|
3.1.1 |
Značka: … |
|
3.1.2 |
Výrobce (název a adresa): … |
|
3.1.3 |
Druh brzdy (např. bubnová/kotoučová): … |
|
3.1.3.1 |
Varianta (např. s S-klíčem, s jedním rozpěracím klínem, atd.) … |
|
3.1.4 |
Identifikátor brzdy: ID2-… |
|
3.1.5 |
Údaje o brzdě podle následujících obrázků 2A a 2B: Obrázek 2A
Obrázek 2B
|
|
3.2 |
Údaje o bubnové brzdě |
|
3.2.1 |
Seřizovací zařízení brzdy (externí/integrované): … |
|
3.2.2 |
Deklarovaný maximální vstupní brzdný moment Cmax: …Nm |
|
3.2.3 |
Mechanická účinnost: η = … |
|
3.2.4 |
Deklarovaná prahová hodnota vstupního brzdného momentu C0,dec: … Nm |
|
3.2.5 |
Účinná délka hřídele klíče: … mm |
|
3.3 |
Brzdový buben |
|
3.3.1 |
Maximální průměr třecí plochy (hranice opotřebení): …mm |
|
3.3.2 |
Základní materiál: … |
|
3.3.3 |
Deklarovaná hmotnost: … kg |
|
3.3.4 |
Jmenovitá hmotnost: … kg |
|
3.4 |
Brzdové obložení |
|
3.4.1 |
Výrobce (jméno a adresa): … |
|
3.4.2 |
Značka: … |
|
3.4.3 |
Typ: … |
|
3.4.4 |
Identifikace (identifikace typu na obložení): … |
|
3.4.5 |
Minimální tloušťka (hranice opotřebení): … mm |
|
3.4.6 |
Způsob připevnění třecího materiálu k brzdové čelisti: … |
|
3.4.6.1 |
Nejnepříznivější způsob připevnění (je-li způsobů více): … |
|
3.5 |
Údaje o kotoučové brzdě |
|
3.5.1 |
Druh připevnění k nápravě (axiální, radiální, integrované, atd.): … |
|
3.5.2 |
Seřizovací zařízení brzdy (externí/integrované): … |
|
3.5.3 |
Maximální zdvih pístu: …mm |
|
3.5.4 |
Deklarovaná maximální vstupní síla ThAmax: … daN |
|
3.5.4.1 |
Cmax = ThAmax · le: … Nm |
|
3.5.5 |
Třecí poloměr: re = … mm |
|
3.5.6 |
Délka páky: le = … mm |
|
3.5.7 |
Poměr vstup/výstup (le/ee): i = … |
|
3.5.8 |
Mechanická účinnost: η = … |
|
3.5.9 |
Deklarovaná prahová hodnota vstupní síly ThA0,dec: …N |
|
3.5.9.1 |
C0,dec = ThA0,dec · le: …Nm |
|
3.5.10 |
Minimální tloušťka rotoru (hranice opotřebení): …mm |
|
3.6 |
Údaje o brzdovém kotouči |
|
3.6.1 |
Popis druhu kotouče: … |
|
3.6.2 |
Spojení s nábojem kola / montáž k náboji: … |
|
3.6.3 |
Větrání (ano/ne): … |
|
3.6.4 |
Deklarovaná hmotnost: … kg |
|
3.6.5 |
Jmenovitá hmotnost: … kg |
|
3.6.6 |
Deklarovaný vnější průměr: … mm |
|
3.6.7 |
Minimální vnější průměr: … mm |
|
3.6.8 |
Vnitřní průměr třecího prstence: … mm |
|
3.6.9 |
Šířka větracího kanálu (připadá-li v úvahu): …mm |
|
3.6.10 |
Základní materiál: … |
|
3.7 |
Údaje o brzdové destičce |
|
3.7.1 |
Název a adresa výrobce: … |
|
3.7.2 |
Značka: … |
|
3.7.3 |
Typ: … |
|
3.7.4 |
Identifikace (identifikace typu na destičce s obložením): … |
|
3.7.5 |
Minimální tloušťka (hranice opotřebení): … mm |
|
3.7.6 |
Způsob připevnění třecího materiálu k destičce: … |
|
3.7.6.1 |
Nejnepříznivější způsob připevnění (je-li způsobů více): …“ |
Změny přílohy 13
Příloha 13, bod 4.3 se nahrazuje tímto:
|
„4.3 |
V případě poruchy uvedené v bodě 4.1 platí následující požadavky:
|
Změny přílohy 16
Příloha 16 se nahrazuje tímto:
„PŘÍLOHA 16
Kompatibilita mezi tažnými a přípojnými vozidly z hlediska sdělování dat podle normy iso 11992
1. OBECNĚ
|
1.1 |
Požadavky této přílohy platí pouze pro tažná vozidla a přípojná vozidla vybavená elektrickým ovládacím vedením, které je definováno v bodě 2.24 tohoto předpisu. |
|
1.2 |
Konektor podle normy ISO 7638 zajišťuje přívod elektrické energie do brzdového systému nebo protiblokovacího brzdového systému přípojného vozidla. U vozidel vybavených elektrickým ovládacím vedením definovaným v bodě 2.24 tohoto předpisu slouží tento konektor také jako rozhraní pro sdělování dat prostřednictvím pólu 6 a 7 – viz bod 5.1.3.6 tohoto předpisu. |
|
1.3 |
Tato příloha stanoví požadavky na tažné vozidlo a přípojné vozidlo z hlediska předávání a přijímání zpráv definovaných v normě ISO 11992-2:2003 a její změně 1:2007. |
2. Parametry definované v normě ISO 11992-2:2003 a její změně 1:2007, které jsou přenášeny elektrickým ovládacím vedením, se předávají a přijímají takto:
|
2.1 |
Následující funkce a s nimi spojené zprávy, jak jsou definovány v tomto předpisu, musí být předávány a přijímány tažným vozidlem nebo přípojným vozidlem, podle případu:
|
|
2.2 |
Když přípojné vozidlo předává následující zprávy, musí tažné vozidlo uvést do činnosti výstražný signál pro řidiče:
|
|
2.3 |
Následující zprávy definované v normě ISO 11992-2:2003 a její změně 1:2007 musí být předávány a přijímány tažným vozidlem nebo přípojným vozidlem:
|
|
2.4 |
Následující zprávy musí být podle případu předávány a přijímány tažným vozidlem nebo přípojným vozidlem, když je na vozidle nainstalována funkce spojená s dotyčným parametrem:
|
|
2.5 |
Předávání a přijímání všech ostatních zpráv definovaných v normě ISO 11992-2:2003 a její změně 1:2007 je pro tažné vozidlo a přípojné vozidlo volitelné.“ |
Změny přílohy 17
Příloha 17,
přidávají se nové body 3.2.2.6 a 3.2.2.7, které znějí:
„3.2.2.6 Rozsvícení brzdových svítilen
Simuluje se zpráva EBS 22 (byte 4) s bity 5 až 6, nastavená na 00 a zkontroluje se, že brzdové svítilny nejsou rozsvíceny.
Simuluje se zpráva EBS 22 (byte 4) s bity 5 až 6, nastavená na 01 a zkontroluje se, že brzdové svítilny jsou rozsvíceny.
3.2.2.7 Intervence stabilitní funkce přípojného vozidla
Simuluje se zpráva EBS 21 (byte 2) s bity 1 až 2, nastavená na 00 a zkontroluje se, že výstražná signalizace pro řidiče definovaná v bodě 2.1.6 přílohy 21 není rozsvícena.
Simuluje se zpráva EBS 21 (byte 2) s bity 1 až 2, nastavená na 01 a zkontroluje se, že výstražná signalizace pro řidiče definovaná v bodě 2.1.6 přílohy 21 je rozsvícena.“
Přidává se nový bod 3.2.3.2, který zní:
|
„3.2.3.2 |
Bod 2.4.1 přílohy 16 definuje doplňkové zprávy, které zajišťuje tažné vozidlo za specifických podmínek. Je možno provést doplňkové kontroly k ověření stavu předávaných a přijímaných zpráv, kterými se zajistí plnění požadavku bodu 5.1.3.6.2 tohoto předpisu.“ |
Přidávají se nové body 4.2.2.4 až 4.2.2.6, které znějí:
„4.2.2.4 Automaticky ovládané brzdění
Když je přípojné vozidlo vybaveno funkcí, jejíž činnost vyvolá intervenci automaticky ovládaného brzdění, ověří se následující:
Když se negeneruje žádná intervence automaticky ovládaného brzdění, ověří se, že zpráva EBS 22 (byte 4) s bity 5 až 6 je nastavena na 00.
Simuluje se intervence automaticky ovládaného brzdění, a když je výsledné zpomalení 0,7 m/s2 nebo větší, ověří se, že zpráva EBS 22 (byte 4) s bity 5 až 6 je nastavena na 01.
4.2.2.5 Stabilitní funkce vozidla
Když je přípojné vozidlo vybaveno stabilitní funkcí vozidla, ověří se následující:
|
|
Když je stabilitní funkce vozidla mimo činnost, ověří se, že zpráva EBS 21 (byte 2) s bity 1 až 2 je nastavena na 00. |
|
|
Simuluje se intervence stabilitní funkce vozidla, jak je specifikováno v bodě 2.2.4 přílohy 21, a ověří se, že zpráva EBS 21 (byte 2) s bity 1 až 2 je nastavena na 01. |
4.2.2.6 Podpora elektrického ovládacího vedení
Když brzdový systém přípojného vozidla nepodporuje brzdění prostřednictvím elektrického ovládacího vedení, ověří se, že zpráva EBS 22 (byte 4) s bity 7 až 8 je nastavena na 00.
Když brzdový systém přípojného vozidla podporuje brzdění prostřednictvím elektrického ovládacího vedení, ověří se, že zpráva EBS 22 (byte 4) s bity 7 až 8 je nastavena na 01.“
Přidává se nový bod 4.2.3.2, který zní:
|
„4.2.3.2 |
Bod 2.4.2 přílohy 16 definuje doplňkové zprávy, které zajišťuje přípojné vozidlo za specifických podmínek. Je možno provést doplňkové kontroly k ověření stavu předávaných a přijímaných zpráv, kterými se zajistí plnění požadavku bodu 5.1.3.6.2 tohoto předpisu.“ |
Změny přílohy 19
Příloha 19,
přidává se nový bod 1.1.5, který zní:
|
„1.1.5 |
Stabilitní funkce vozidla (viz bod 6).“ |
V bodě 2.2.3 má původní dodatek 7 nyní číslo 9.
Bod 4.2.2 se nahrazuje tímto:
|
„4.2.2 |
Faktor vnitřního převodu brzdy se určí následujícím vzorcem:
a ověří se pro každý z materiálů brzdového obložení uvedených v bodě 4.3.1.3.“ |
Bod 4.3.2.3 se nahrazuje tímto:
|
„4.3.2.3 |
Deklarovaná prahová hodnota momentu C0,dec“. |
Přidávají se nové body 6 až 6.6.1, které znějí:
‘6. Stabilitní funkce vozidla
6.1 Obecně
|
6.1.1 |
Tento oddíl definuje postup zkoušek k určení dynamických vlastností vozidla vybaveného stabilitní funkcí vozidla, která se skládá alespoň z jedné z následujících funkcí:
|
6.2 Informační dokument
|
6.2.1 |
Výrobce systému/vozidla předá technické zkušebně informační dokument k řídící funkci (funkcím), jejíž vlastnosti se mají ověřovat. Tento dokument musí obsahovat alespoň informace uvedené v dodatku 7 k této příloze. |
6.3 Definice zkoušeného vozidla (vozidel)
|
6.3.1 |
Technická zkušebna ověří vlastnosti na základě stabilitní řídící funkce (funkcí) a jejího použití podle informačního dokumentu výrobce. Toto ověření může zahrnovat jeden nebo více dynamických manévrů uvedených v bodě 2.2.3 přílohy 21 tohoto předpisu a vykonaných s přípojným vozidlem (vozidly) majícím nejvýše tři nápravy, které je reprezentativní pro použití, jež jsou uvedena v bodě 2.1 informačního dokumentu výrobce. |
|
6.3.1.1 |
Při výběru přípojného vozidla (vozidel) k hodnocení se musí vzít v úvahu také toto:
|
6.4 Zkušební postup
|
6.4.1 |
Zkoušky použité k hodnocení stabilitní řídící funkce vozidla se dohodnou mezi výrobcem systému/vozidla a technickou zkušebnou a jejich součástí musí být podmínky vztahující se k hodnocené funkci a které by bez intervence stabilitní řídící funkce vedly ke ztrátě ovládání směru jízdy nebo k převrácení. Dynamické manévry, podmínky zkoušky a výsledky se uvedou ve zkušebním protokolu. |
6.5 Tažné vozidlo
|
6.5.1 |
Tažné vozidlo použité k hodnocení vlastností stabilitní funkce (přípojného) vozidla musí mít potřebné pneumatické a elektrické spojovací vedení a jestliže je tažné vozidlo vybaveno stabilitní funkcí vozidla podle bodu 2.34 tohoto předpisu, musí být tato funkce vyřazena z činnosti. |
6.6 Zkušební protokol
|
6.6.1 |
Vypracuje se zkušební protokol, který musí obsahovat alespoň informace uvedené v dodatku 8 k této příloze.’ |
Vkládá se nový dodatek 7 přílohy 19, který zní:
„DODATEK 7
Informační dokument ke stabilitní funkci vozidla
1. OBECNĚ
|
1.1 |
Název výrobce |
|
1.2 |
Název systému |
|
1.3 |
Varianty systému |
|
1.4 |
Řídící funkce (směrové řízení / opatření proti převrácení / obě) včetně vysvětlení základní funkce a /nebo principů řídící funkce |
|
1.5 |
Konfigurace systému (v příslušných případech) |
|
1.6 |
Identifikace systému |
2. POUŽITÍ
|
2.1 |
Seznam typů přípojných vozidel a konfigurací, pro které se žádá schválení. |
|
2.2 |
Schématické grafy jednotlivých konfigurací instalovaných na přípojných vozidlech uvedených podle bodu 2.1 a obsahující následující parametry:
|
|
2.3 |
Oblast použití z hlediska druhu zavěšení náprav:
|
|
2.4 |
Popřípadě doplňkové informace k použití funkce (funkcí) směrového řízení a/nebo opatření proti převrácení |
3. POPIS ČÁSTÍ
3.1 Čidla vně řídícího zařízení
|
a) |
funkce; |
|
b) |
omezení týkající se umístění čidel; |
|
c) |
identifikace, např. čísla dílů. |
3.2 Řídící zařízení
|
a) |
celkový popis a funkce; |
|
b) |
identifikace, např. čísla dílů; |
|
c) |
omezení týkající se umístění řídícího (řídících) zařízení; |
|
d) |
doplňkové vlastnosti. |
3.3 Modulátory
|
a) |
celkový popis a funkce; |
|
b) |
identifikace; |
|
c) |
omezení. |
3.4 Elektrické zařízení
|
a) |
schémata obvodů; |
|
b) |
způsoby napájení. |
3.5 Pneumatické okruhy
Schémata systému, včetně konfigurací protiblokovacího systému, použitého u typu přípojných vozidel definovaných v bodě 6.2.1 této přílohy.
3.6 Hlediska bezpečnosti elektronického systému podle přílohy 18 tohoto předpisu
3.7 Elektromagnetická kompatibilita
|
3.7.1 |
Dokumentace prokazující plnění ustanovení předpisu č. 10 ve znění série změn 02.“ |
Vkládá se nový dodatek 8 přílohy 19, který zní:
„DODATEK 8
Zkušební protokol ke stabilitní funkci vozidla
ZKUŠEBNÍ PROTOKOL č.: …
1. IDENTIFIKACE
|
1.1 |
Výrobce systému stabilitní funkce vozidla (název a adresa): … |
|
1.2 |
Název a model systému: … |
|
1.3 |
Řídící funkce: … |
2. SCHVÁLENÝ SYSTÉM (SYSTÉMY) A SCHVÁLENÉ INSTALACE
|
2.1 |
Konfigurace protiblokovacího systému (v příslušných případech): … |
|
2.2 |
Rozsah použití (typ přípojného vozidla a počet náprav): … |
|
2.3 |
Identifikace systému: … |
|
2.4 |
Doplňkové vlastnosti: … |
3. ÚDAJE O ZKOUŠKÁCH A VÝSLEDKY ZKOUŠEK
|
3.1 |
Údaje o zkoušeném vozidle (včetně specifikace a funkčních vlastností tažného vozidla): … |
|
3.2 |
Informace o povrchu zkušební dráhy: … |
|
3.3 |
Doplňkové informace: … |
|
3.4 |
Demonstrační zkoušky/simulace použité k hodnocení směrového řízení a opatření proti převrácení, podle případu: … |
|
3.5 |
Výsledky zkoušek: … |
|
3.6 |
Hodnocení podle přílohy 18 tohoto předpisu: … |
4. OMEZENÍ TÝKAJÍCÍ SE MONTÁŽE
|
4.1 |
Druh zavěšení náprav: … |
|
4.2 |
Druh brzd: … |
|
4.3 |
Umístění částí na přípojném vozidle: … |
|
4.4 |
Konfigurace protiblokovacího systému: … |
|
4.5 |
Ostatní doporučení/omezení (např. zdvihatelné nápravy, řízené nápravy atd.): … |
5. PŘÍLOHY …
6. DATUM ZKOUŠKY: …
7. Tato zkouška byla provedena a výsledky byly uvedeny v protokolu podle přílohy 19 předpisu EHK č. 13 naposledy pozměněného sérií změn …
TECHNICKÁ ZKUŠEBNA (19), KTERÁ PROVEDLA ZKOUŠKU
Podpis: … Datum: …
8. SCHVALOVACÍ ORGÁN (19)
Podpis: … Datum: …
Dodatky 7 a 8 mají nyní čísla 9 a 10.
Změny přílohy 20
Příloha 20
Bod 2.1.3 se nahrazuje tímto:
|
„2.1.3 |
Složka dokumentace, která obsahuje údaje o příslušných ověřeních, včetně výpočtů, v příslušných případech, pro následující položky:
|
Přidávají se nové body 8. až 8.2.1.4, které znějí:
8. Alternativní postup k demonstraci vlastností přípojného vozidla vybaveného stabilitní funkcí vozidla.
8.1 Při schválení typu přípojného vozidla se může od hodnocení přípojného vozidla podle bodu 2 přílohy 21 tohoto předpisu upustit za podmínky, že stabilitní funkce vozidla splňuje příslušné požadavky přílohy 19 tohoto předpisu.
8.2 Ověření
8.2.1 Ověření konstrukčních částí a instalace
Specifikace brzdového systému, do kterého je integrována stabilitní řídící funkce a který je instalován na přípojném vozidle, jehož typ se má schválit, se ověří zjištěním, zde je splněno každé z následujících kritérií:
|
|
Podmínka |
Kritérium |
||
|
8.2.1.1 |
|
Není přípustná žádná změna |
||
|
Není přípustná žádná změna |
|||
|
Není přípustná žádná změna |
|||
|
8.2.1.2 |
Typy přípojných vozidel uvedené ve zkušebním protokolu |
Není přípustná žádná změna |
||
|
8.2.1.3 |
Konfigurace instalace uvedené ve zkušebním protokolu |
Není přípustná žádná změna |
||
|
8.2.1.4 |
K ostatním omezením viz bod 4 zkušebního protokolu popsaného v dodatku 8 k příloze 19 tohoto předpisu. |
Není přípustná žádná změna“ |
Dosavadní body 8 až 8.1.7.1 mají nyní čísla 9 až 9.1.7.1.
Dosavadní body 8.1.8 a 8.1.8.1 mají nyní čísla 9.1.9. a 9.1.9.1.
Přidávají se nové body 9.1.8. a 9.1.8.1, které znějí:
„9.1.8 Stabilitní funkce vozidla
|
9.1.8.1 |
Z praktických důvodů se ověření stabilitní funkce vozidla omezí na kontrolu instalace podle ustanovení bodu 8.2 a na pozorování správného sledu výstražného signálu udávající, že v systému nejsou žádné závady.“ |
Přidává se nová příloha 21, která zní (včetně dodatků 1 až 3):
PŘÍLOHA 21
Zvláštní požadavky na vozidla vybavená stabilitní funkcí vozidla
1. OBECNĚ
Tato příloha stanoví zvláštní požadavky na vozidla vybavená stabilitní funkcí vozidla podle bodů 5.2.1.32 a 5.2.2.23 tohoto předpisu.
2. POŽADAVKY
2.1 Motorová vozidla
|
2.1.1 |
Když je vozidlo vybaveno stabilitní funkcí vozidla definovanou v bodě 2.34 tohoto předpisu, platí následující ustanovení:
|
|
2.1.2 |
Aby se zajistilo výše uvedené fungování vozidla, musí stabilitní funkce vozidla navíc k selektivnímu brzdění a/nebo automaticky ovládanému brzdění mít alespoň následující vlastnosti:
|
|
2.1.3 |
Stabilitní funkce vozidla musí být demonstrována technické zkušebně při dynamických manévrech s jedním vozidlem. To se může provést porovnáním výsledků zjištěných pro dané podmínky zatížení se stabilitní funkcí vozidla v činnosti a mimo činnost. Jako alternativu k vykonání dynamických manévrů u jiných vozidel a pro jiné podmínky zatížení u vozidel vybavených stejným stabilitním systémem vozidla je možno předložit výsledky ze zkoušek skutečného vozidla nebo výsledky počítačových simulací. Ustanovení pro použití simulace jsou uvedena v dodatku 1 k této příloze. Specifikace a ověření správnosti simulace jsou uvedeny v dodatku 2 k této příloze. Do doby, než budou dohodnuty jednotné zkušební postupy, se výrobce vozidla a technická zkušebna dohodnou na metodě, kterou bude provedena tato demonstrace a která musí obsahovat kritické podmínky pro směrové řízení a pro opatření proti převrácení, jež odpovídají stabilitní funkci vozidla instalované ve vozidle. Tato metoda demonstrace a výsledky se přiloží ke zkušebnímu protokolu pro schválení typu. Je to možné provést jindy než přímo při schvalování typu. Jako prostředek k demonstraci stabilitní funkce vozidla se použije kterýkoli z následujících dynamických manévrů (22):
K prokázání reprodukovatelnosti se provede s vozidlem druhá demonstrační zkouška s použitím vybraného manévru (manévrů). |
|
2.1.4 |
Na intervenci stabilitní funkce vozidla musí být řidič upozorněn zvláštním optickým výstražným signálem. Tento signál musí být v činnosti po celou dobu, kdy je stabilitní funkce vozidla v režimu intervence. K tomuto účelu není možno použít výstražné signály uvedené v bodě 5.2.1.29 tohoto předpisu. Intervence stabilitní funkce vozidla, které se použijí v některém průzkumném postupu k určení provozních vlastností vozidla, nesmějí generovat výše uvedený signál. Signál musí být pro řidiče viditelný i za denního světla a zařízení musí být takové, aby řidič mohl ze svého sedadla snadno ověřit správnou funkci signalizace. |
|
2.1.5 |
Porucha nebo závada stabilitní funkce vozidla musí být zjištěna a musí být signalizována řidiči optickým výstražným signálem žluté barvy uvedený v bodě 5.2.1.29.1.2 tohoto předpisu. Výstražný signál musí být stálý a musí svítit tak dlouho, dokud porucha nebo závada trvá a spínač zapalování (startování) je v poloze ‚zapnuto‘ (běh motoru). |
|
2.1.6 |
U motorového vozidla vybaveného elektrickým ovládacím vedením a elektricky spojeného s přípojným vozidlem, které má elektrické ovládací vedení, musí být řidič varován zvláštním optickým výstražným signálem vždy, když přípojné vozidlo vyšle informaci ‚stabilitní funkce vozidla v činnosti‘ prostřednictvím části pro sdělování dat elektrického ovládacího vedení. K tomuto účelu je možno použít optický signál uvedený výše v bodě 2.1.4. |
2.2 Přípojná vozidla
|
2.2.1 |
Když je přípojné vozidlo vybaveno stabilitní funkcí vozidla definovanou v bodě 2.34 tohoto předpisu, platí následující ustanovení:
|
|
2.2.2 |
Aby se zajistilo výše uvedené fungování vozidla, musí stabilitní funkce vozidla navíc k automaticky ovládanému brzdění a případně selektivnímu brzdění mít alespoň následující vlastnosti:
|
|
2.2.3 |
Stabilitní funkce vozidla musí být demonstrována technické zkušebně při dynamických manévrech s jedním vozidlem. To se může provést porovnáním výsledků zjištěných pro dané podmínky zatížení se stabilitní funkcí vozidla v činnosti a mimo činnost. Jako alternativu k vykonání dynamických manévrů u jiných vozidel a pro jiné podmínky zatížení u vozidel vybavených stejným stabilitním systémem vozidla je možno předložit výsledky ze zkoušek skutečného vozidla nebo výsledky počítačových simulací. Ustanovení pro použití simulace jsou uvedena v dodatku 1 k této příloze. Specifikace a ověření správnosti simulace jsou uvedeny v dodatku 2 k této příloze. Do doby, než budou dohodnuty jednotné zkušební postupy, se výrobce přípojného vozidla a technická zkušebna dohodnou na metodě, kterou bude provedena tato demonstrace a která musí obsahovat kritické podmínky pro opatření proti převrácení a pro směrové řízení, jež odpovídají stabilitní funkci vozidla instalované v přípojném vozidle. Tato metoda prokázání a výsledky se přiloží ke zkušebnímu protokolu pro schválení typu. Je to možné provést jindy než přímo při schvalování typu. Jako prostředek k demonstraci stabilitní funkce vozidla se použije kterýkoli z následujících dynamických manévrů (22):
K prokázání reprodukovatelnosti se provede s vozidlem druhá demonstrační zkouška s použitím vybraného manévru (manévrů). |
|
2.2.4 |
Přípojná vozidla vybavená elektrickým ovládacím vedením a elektricky spojená s tažným vozidlem, které má elektrické ovládací vedení, musí vysílat informaci ‚stabilitní funkce vozidla v činnosti‘ prostřednictvím části pro sdělování dat elektrického ovládacího vedení. Intervence stabilitní funkce vozidla, které se použijí v některém průzkumném postupu k určení provozních vlastností přípojného vozidla, nesmějí generovat výše uvedené informace. |
|
2.2.5 |
Aby se maximalizovaly vlastnosti přípojných vozidel, která používají regulaci s ‚dolní selekcí‘, je přípustné u takových přípojných vozidel změnit režim regulace na ‚horní selekci‘ po dobu trvání intervence ‚stabilitní funkce vozidla‘. |
DODATEK 1
Použití Simulace Dynamické Stability
Účinnost stabilitní řídící funkce směrového řízení a/nebo opatření proti převrácení motorových vozidel a přípojných vozidel kategorií M, N a O je možno určit počítačovou simulací.
1. POUŽITÍ SIMULACE
|
1.1 |
Výrobce vozidla demonstruje schvalovacímu orgánu nebo technické zkušebně vlastnosti stabilitní funkce vozidla stejným dynamickým manévrem (dynamickými manévry) jako při praktické demonstraci podle bodů 2.1.3 nebo 2.2.3 přílohy 21. |
|
1.2 |
Simulace je prostředkem, kterým se mohou demonstrovat stabilitní vlastnosti vozidla se stabilitní funkcí vozidla v činnosti a mimo činnost, a se zatíženým vozidlem nebo s nezatíženým vozidlem. |
|
1.3 |
Simulace se musí provést s modelováním a se simulačním nástrojem, u nichž byla ověřena jejich správnost. Ověření se provede s použitím stejného manévru (manévrů), jak je uvedeno výše v bodě 1.1. Metoda, kterou se ověří správnost simulačního nástroje, je uvedena v příloze 21, dodatku 2. |
DODATEK 2
Simulační nástroj dynamické stability a ověření jeho správnosti
1. SPECIFIKACE SIMULAČNÍHO NÁSTROJE
1.1 Metoda simulace musí vzít v úvahu hlavní faktory, které ovlivňují směrový a klopný pohyb vozidla. Typický model může obsahovat následující parametry vozidla, jak v explicitním tvaru tak v implicitním tvaru:
|
a) |
náprava/kolo; |
|
b) |
zavěšení nápravy; |
|
c) |
pneumatika; |
|
d) |
podvozek/karoserie vozidla; |
|
e) |
motorová skupina/hnací ústrojí, v příslušných případech; |
|
f) |
brzdový systém; |
|
g) |
hmotnost nákladu. |
1.2 Stabilitní funkce vozidla se připojí k simulačnímu modelu prostřednictvím:
|
a) |
subsystému (softwarového modelu) simulačního nástroje, nebo |
|
b) |
elektronické řídící jednotky v konfiguraci hardwarové smyčky. |
1.3 U přípojného vozidla se simulace provede s přípojným vozidlem připojeným k reprezentativnímu tažnému vozidlu.
1.4 Podmínka naložení vozidla
|
1.4.1 |
Simulace musí být schopna pracovat s naloženým a nenaloženým stavem vozidla. |
|
1.4.2 |
Náklad se musí pokládat za upevněný náklad s vlastnostmi specifikovanými výrobcem (hmotnost, rozdělení hmotnosti a maximální doporučená výška těžiště). |
2. OVĚŘENÍ SPRÁVNOSTI SIMULAČNÍHO NÁSTROJE
|
2.1 |
Správnost použitého modelování a simulačního nástroje se ověří prostřednictvím porovnání s praktickou zkouškou (zkouškami) vozidla. Zkouška (zkoušky) použité k ověření správnosti musí být zkoušky, jejichž výsledkem by byly, bez řídícího zásahu, ztráta ovládání směru (nedotáčivost a přetáčivost) nebo převrácení vozidla, ve vztahu k vlastnostem stabilitní řídící funkce, která je instalována na reprezentativním vozidle. V průběhu zkoušky (zkoušek) se zaznamenají nebo vypočtou následující proměnné vyjadřující pohyb, které jsou vhodné, a to podle normy ISO 15037 Část 1:2005: Všeobecné podmínky pro osobní automobily nebo Část 2:2002: Všeobecné podmínky pro těžká vozidla a autobusy (v závislosti na kategorii vozidla):
|
|
2.2 |
Cílem je ukázat, že simulované chování vozidla a činnost stabilitní funkce vozidla jsou srovnatelné s tím, co bylo zjištěno praktickými zkouškami vozidla. |
|
2.3 |
Správnost simulace se pokládá za ověřenou, když je její výstup srovnatelný s výsledky praktické zkoušky, které byly dosaženy s daným typem vozidla v průběhu manévru (manévrů) vybraných z manévrů uvedených v bodě 2.1.3 nebo 2.2.3 přílohy 21, podle případu. V případě zkoušky jízdou po kružnici ustálenou rychlostí je prostředkem srovnání gradient neotáčivosti. V případě dynamického manévru je prostředkem porovnání poměr uvedení do činnosti a sled stabilitní funkce vozidla při simulaci a při praktické zkoušce vozidla. |
|
2.4 |
Fyzikální parametry, které jsou rozdílné u referenčního vozidla a u simulovaných konfigurací vozidla, se musí v simulaci příslušně změnit. |
|
2.5 |
Musí se vypracovat zkušební protokol o simulaci, jehož vzor je uveden v dodatku 3 k této příloze, a jeho kopie se musí přiložit k protokolu pro schválení vozidla. |
DODATEK 3
Zkušební protokol k simulačnímu nástroji stabilitní funkce vozidla
ČÍSLO ZKUŠEBNÍHO PROTOKOLU: …
1. IDENTIFIKACE
|
1.1 |
Název a adresa výrobce simulačního nástroje |
|
1.2 |
Identifikace simulačního nástroje: název/model/číslo (hardware a software) |
2. ROZSAH POUŽITÍ
|
2.1 |
Typ vozidla: (např. nákladní automobil, tahač, autobus, návěs, přívěs s nápravami uprostřed, přívěs) |
|
2.2 |
Konfigurace vozidla: (např. 4 × 2, 4 × 4, 6 × 2, 6 × 4, 6 × 6) |
|
2.3 |
Omezující faktory: (např. jen mechanické zavěšení náprav) |
|
2.4 |
Manévr (manévry), pro který byla ověřena správnost simulace: |
3. OVĚŘOVACÍ ZKOUŠKA (ZKOUŠKY) VOZIDLA
|
3.1 |
Popis vozidla (vozidel), včetně tažného vozidla v případě, kdy se zkouší přípojné vozidlo: |
|
3.1.1 |
Identifikace vozidla (vozidel): značka/model/VIN |
|
3.1.1.1 |
Nestandardní vybavení: |
|
3.1.2 |
Popis vozidla, včetně konfigurace náprav/zavěšení náprav/kol, motor a hnací ústrojí, brzdový systém (systémy) a obsah stabilitní funkce vozidla (směrové řízení, opatření proti převrácení), systém řízení, s uvedením identifikace značky/modelu/čísla: |
|
3.1.3 |
Údaje o vozidle použité v simulaci (explicitně): |
|
3.2 |
Popis zkoušky (zkoušek), včetně místa (míst), vlastnosti povrchu silnice / zkušební plochy, teplota a datum (data): |
|
3.3 |
Výsledky pro naložený a nenaložený stav, se stabilitní funkcí vozidla v činnosti a mimo činnost, včetně proměnných veličin pohybu, které jsou uvedeny v příloze 21, dodatku 2 a které přicházejí v úvahu: |
4. VÝSLEDKY SIMULACE
|
4.1 |
Parametry vozidla a hodnoty použité v simulaci, které nebyly vzaty ze skutečně zkoušeného vozidla (implicitní): |
|
4.2 |
Výsledky pro naložený a nenaložený stav, se stabilitní funkcí vozidla v činnosti a mimo činnost pro každou zkoušku provedenou podle bodu 3.2 tohoto dodatku, včetně proměnných veličin pohybu, které jsou uvedeny v příloze 21, dodatku 2 bodu 2.1 a které přicházejí v úvahu: |
5. Tato zkouška byla provedena a výsledky byly uvedeny v protokolu podle dodatku 2 přílohy 21 předpisu EHK č. 13 naposledy pozměněného sérií změn …
Technická zkušebna (23), která provedla zkoušku …
Podpis: …Datum: …
Schvalovací orgán (23) …
Podpis: …Datum: …
(1) Na terénní vozidla, vozidla zvláštního určení (např. mobilní zařízení používající nestandardní podvozek vozidla jako např. jeřábová vozidla, vozidla s hydrostatickým pohonem, u nichž se hydraulický systém pohonu používá také k brzdění a k pomocným funkcím), autobusy kategorií M2 a M3 třídy I a třídy A, kloubové autobusy a tahače návěsů kategorie N2 s celkovou hmotností vozidla mezi 3,5 t a 7,5 t se tento požadavek nevztahuje.’
(2) Na přípojná vozidla pro přepravu mimořádných nákladů a přípojná vozidla s prostorem vyhrazeným pro stojící cestující se tento požadavek nevztahuje.’
(3) Tento odstavec nebrání Dánsku, aby nadále vyžadovalo povinnou stabilitní funkci vozidla, která splňuje požadavky tohoto předpisu.’
(4) Třída III podle definice předpisu č. 107.’
(5) See paragraph Viz bod 2.1 dodatku 2 této přílohy.’
(6) Připadá-li v úvahu.
(7) Zkouška se nepožaduje, jestliže výrobce může prokázat, že změna neovlivňuje tuhost.
(8) Nehodící se škrtněte.
(9) Týká se jen kotoučových brzd.
(10) Týká se jen bubnových brzd.
(11) Vyplní se jen tehdy, když je instalováno zařízení k automatickému seřizování brzd.
(12) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacího orgánu.
(13) VDC (Vehicle Dynamic Control), tj. dynamické řízení vozidla, definované v normě ISO 11992-2:2003 a její změně 1:2007, je definováno v tomto předpisu jako stabilitní funkce vozidla – viz bod 2.34 předpisu.
(14) VDC (Vehicle Dynamic Control), tj. dynamické řízení vozidla, definované v normě ISO 11992-2:2003 a její změně 1:2007, je definováno v tomto předpisu jako stabilitní funkce vozidla – viz bod 2.34 předpisu.
(15) ROP (Roll Over Protection), tj. ochrana proti převrácení, definovaná v normě ISO 11992-2:2003 a její změně 1:2007, je definována v tomto předpisu jako opatření proti převrácení – viz bod 2.34.2.2 předpisu.
(16) YC (Yaw Control), tj. ovládání stáčení, definované v normě ISO 11992-2:2003 a její změně 1:2007, je definováno v tomto předpisu jako směrové řízení – viz bod 2.34.2.1 předpisu.
(17) ROP (Roll Over Protection), tj. ochrana proti převrácení, definovaná v normě ISO 11992-2:2003 a její změně 1:2007, je definována v tomto předpisu jako opatření proti převrácení – viz bod 2.34.2.2 předpisu.
(18) YC (Yaw Control), tj. ovládání stáčení, definované v normě ISO 11992-2:2003 a její změně 1:2007, je definováno v tomto předpisu jako směrové řízení – viz bod 2.34.2.1 předpisu.
(19) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací, nebo alternativně, když je se zkušebním protokolem vydána autorizace schvalovacím orgánem.
(20) V případě skupin náprav, u nichž je rozvor mezi jednou nápravou a její sousední nápravou větší než 2 m, se posuzuje každá jednotlivá náprava jako nezávislá skupina náprav.
(21) Doplňková interakce s jinými systémy nebo konstrukčními částmi vozidla je přípustná. Jestliže pro tyto systémy nebo konstrukční části platí zvláštní předpisy, musí taková interakce splňovat požadavky těchto předpisů, např. interakce se systémem řízení musí splňovat požadavky stanovené předpisem č. 79 pro funkci korektivního řízení.
(22) Jestliže použití některého z výše uvedených manévru nevede ke ztrátě směrového řízení nebo k převrácení, podle případu, může se po dohodě s technickou zkušebnou použít alternativní manévr.
(23) Musí podepsat rozdílné osoby, a to i v případě, když technická zkušebna a schvalovací orgán jsou toutéž organizací.