(EU) 2021/1226Směrnice Komise v přenesené pravomoci (EU) 2021/1226 ze dne 21. prosince 2020, kterou se pro účely přizpůsobení vědeckému a technickému pokroku mění příloha II směrnice Evropského parlamentu a Rady 2002/49/ES, pokud jde o společné metody hodnocení hluku (Text s významem pro EHP)
| Publikováno: | Úř. věst. L 269, 28.7.2021, s. 65-142 | Druh předpisu: | Směrnice v přenesené pravomoci |
| Přijato: | 21. prosince 2020 | Autor předpisu: | Evropská komise |
| Platnost od: | 29. července 2021 | Nabývá účinnosti: | 29. července 2021 |
| Platnost předpisu: | Ano | Pozbývá platnosti: | |
Text předpisu s celou hlavičkou je dostupný pouze pro registrované uživatele.
|
28.7.2021 |
CS |
Úřední věstník Evropské unie |
L 269/65 |
SMĚRNICE KOMISE V PŘENESENÉ PRAVOMOCI (EU) 2021/1226
ze dne 21. prosince 2020,
kterou se pro účely přizpůsobení vědeckému a technickému pokroku mění příloha II směrnice Evropského parlamentu a Rady 2002/49/ES, pokud jde o společné metody hodnocení hluku
(Text s významem pro EHP)
EVROPSKÁ KOMISE,
s ohledem na Smlouvu o fungování Evropské unie,
s ohledem na směrnici Evropského parlamentu a Rady 2002/49/ES ze dne 25. června 2002 o hodnocení a řízení hluku ve venkovním prostředí (1), a zejména na článek 12 uvedené směrnice,
vzhledem k těmto důvodům:
|
(1) |
Příloha II směrnice 2002/49/ES stanoví metody hodnocení společné pro členské státy, které se použijí k získání informací o hluku ve venkovním prostředí a jeho účincích na zdraví, zejména k hlukovému mapování a k přijetí akčních plánů založených na výsledcích hlukového mapování. Tuto přílohu je potřeba přizpůsobit technickému a vědeckému pokroku. |
|
(2) |
Od roku 2016 do roku 2020 Komise spolupracovala s technickými a vědeckými odborníky členských států na posouzení potřebných úprav s přihlédnutím k technickému a vědeckému pokroku ve výpočtu hluku ve venkovním prostředí. Tento proces probíhal v úzké spolupráci s expertní skupinou pro hluk složenou z členských států, Evropského parlamentu, zúčastněných stran z příslušných odvětví, orgánů veřejné správy členských států, nevládních organizací, občanů a akademické obce. |
|
(3) |
Příloha této směrnice v přenesené pravomoci stanoví nezbytné úpravy společných metod hodnocení spočívající v objasnění vzorců pro výpočet šíření hluku, přizpůsobení tabulek nejnovějším poznatkům a zlepšení popisu kroků výpočtů. To má dopad na výpočty hluku ze silniční dopravy, ze železniční dopravy, z průmyslové činnosti a z letecké dopravy. Členské státy jsou povinny tyto metody používat nejpozději ode dne 31. prosince 2021. |
|
(4) |
Příloha II směrnice 2002/49/ES by proto měla být odpovídajícím způsobem změněna. |
|
(5) |
Opatření stanovená touto směrnicí jsou v souladu se stanoviskem expertní skupiny pro hluk konzultované dne 12. října 2020, |
PŘIJALA TUTO SMĚRNICI:
Článek 1
Příloha II směrnice 2002/49/ES se mění v souladu s přílohou této směrnice.
Článek 2
1. Členské státy uvedou v účinnost právní a správní předpisy nezbytné pro dosažení souladu s touto směrnicí nejpozději do dne 31. prosince 2021. Okamžitě sdělí Komisi znění těchto opatření.
Tato opatření přijatá členskými státy musí obsahovat odkaz na tuto směrnici nebo musí být takový odkaz učiněn při jejich úředním vyhlášení. Způsob odkazu si stanoví členské státy.
2. Členské státy sdělí Komisi znění hlavních ustanovení vnitrostátních právních předpisů, které přijmou v oblasti působnosti této směrnice.
Článek 3
Tato směrnice vstupuje v platnost prvním dnem po vyhlášení v Úředním věstníku Evropské unie.
Článek 4
Tato směrnice je určena členským státům.
V Bruselu dne 21. prosince 2020.
Za Komisi
předsedkyně
Ursula VON DER LEYEN
PŘÍLOHA
Příloha II se mění takto:
|
1) |
V oddíle 2.1.1 se druhý pododstavec nahrazuje tímto: „Pro silniční a železniční dopravu a hluk z průmyslové činnosti se výpočty provádějí v oktávových pásmech, kromě výpočtu akustického výkonu zdroje hluku z železniční dopravy, který se provádí v třetinooktávových pásmech. Pro silniční a železniční dopravu a hluk z průmyslové činnosti se na základě těchto výsledků oktávového pásma spočítá dlouhodobý denní, večerní a noční průměr hladiny akustického tlaku A, který je definován v příloze I a uveden v článku 5 směrnice 2002/49/ES, postupem uvedeným v bodech 2.1.2, 2.2, 2.3, 2.4 a 2.5. U silniční a železniční dopravy v aglomeracích je dlouhodobý průměr hladiny akustického tlaku A určen podílem silničního a železničního segmentu, včetně hlavních silnic a železnic.“ |
|
2) |
Oddíl 2.2.1 se mění takto:
|
|
3) |
Tabulka 2.3.b se mění takto:
|
|
4) |
Oddíl 2.3.2 se mění takto:
|
|
5) |
V oddíle 2.3.3 se odstavec pod nadpisem „Korekce vyzařování hluku konstrukcemi (mosty a viadukty)“ nahrazuje tímto: „ V případě, kdy daný úsek koleje leží na mostě, je nutno zohlednit další hluk způsobovaný chvěním mostu v důsledku přítomnosti vlaku. Hluk mostu je modelován jako další zdroj, u něhož je akustický výkon jednotlivých vozidel vyjádřen jako
kde LH, bridge ,i je přenosová funkce mostu. Hluk mostu LW,0, bridge ,i představuje pouze zvuk vyzařovaný mostní konstrukcí. Hluk valení z vozidla na mostu se vypočítá pomocí vzorců (2.3.8) až (2.3.10) tak, že se vybere přenosová funkce koleje odpovídající kolejovému systému přítomnému na mostě. Bariéry na okraji mostu nejsou obecně zohledňovány.“ |
|
6) |
Bod 2.4.1 se mění takto:
|
|
7) |
V bodě 2.5.1 se sedmý pododstavec nahrazuje tímto: „Objekty se sklonem více než 15° ke svislé ose nejsou zohledněny jako předměty odrážející zvuk, ale je k nim přihlédnuto ve všech ostatních aspektech šíření, například s ohledem na účinek povrchu země a ohyb zvuku.“ |
|
8) |
Oddíl 2.5.5 se mění takto:
|
|
9) |
Oddíl 2.5.6 se mění takto:
|



|
10) |
Oddíl 2.7.5 „Hlučnost a charakteristiky letadla“ se nahrazuje tímto: „2.7.5 Hlučnost a charakteristiky letadla Databáze údajů o hlučnosti a charakteristikách letadel (dále jen „ANP“) v dodatku I obsahuje koeficienty charakteristik letadel a motorů, odchozí a příchozí profily a rovněž údaje NPD převážné části civilních letadel provozovaných z letišť v Evropské unii. V případě typů nebo variant letadel, pro které údaje v současnosti nejsou uvedeny, lze použít údaje pro jiná, obvykle obdobná letadla, která uvedena jsou. Tyto údaje byly odvozeny pro výpočet izofon u průměrného nebo reprezentativního leteckého parku a dopravní skladby na letišti. Nemusí být vhodné předpokládat absolutní hladiny hluku u jednotlivých modelů letadel a není vhodné porovnávat akustický výkon a charakteristiky konkrétních typů a modelů letadel nebo konkrétního letadlového parku. Namísto toho bude v osvědčení hlukové způsobilosti stanoveno, které typy či modely letadel nebo konkrétního letadlového parku nejvíce přispívají k hluku. Databáze ANP obsahuje jeden či více profilů pro vzlet a přistání jednotlivých uvedených typů letadel. Platnost těchto profilů pro příslušná letiště bude přezkoumána a pro dotčené letiště budou stanoveny buď profily s pevnými body, nebo procedurální kroky, které nejlépe reprezentují letový provoz na tomto letišti.“ |
|
11) |
V oddíle 2.7.11 se název druhého odstavce pod nadpisem „Rozptyl drah“ nahrazuje tímto: „ “. |
|
12) |
V oddíle 2.7.12 za šestým pododstavcem a před sedmým a posledním pododstavcem se vkládá nový pododstavec, který zní: „Zdroj hluku z letadel je nutné zadat v minimální výšce 1,0m (3,3ft) nad úrovní letiště nebo případně nad výškou terénu vzletové dráhy.“ |
|
13) |
Oddíl 2.7.13, „Tvorba segmentů dráhy letu“, se nahrazuje tímto: „2.7.13 Tvorba segmentů dráhy letu Každá dráha letu musí být definována souborem souřadnic (uzlů) segmentů a letových parametrů. Nejprve se určí souřadnice segmentů průmětu dráhy na zemský povrch. Poté se vypočítá profil letu, přičemž je třeba mít na paměti, že pro daný soubor procedurálních kroků je profil závislý na průmětu dráhy na zemský povrch; například při stejném tahu a rychlosti je stoupavost letadla v zatáčkách nižší než při přímém letu. Následně se pro letadlo na vzletové dráze (rozjezd při vzletu nebo dojezd při přistání) a pro letadlo poblíž vzletové dráhy (počáteční stoupání nebo konečné přiblížení) provede dílčí segmentace. Dále musí být provedena dílčí segmentace segmentů letu s výrazně rozdílnými rychlostmi v počátečním a koncovém bodu. Aby vznikly trojrozměrné segmenty dráhy letu, stanoví se dvourozměrné segmenty souřadnic průmětů dráhy na zemský povrch (*), které se pak spojí do dvourozměrného profilu letu. Nakonec se odstraní všechny body dráhy letu, které jsou příliš blízko sebe. Profil letu Parametry popisující každý segment profilu letu na začátku (index 1) a na konci (index 2) segmentu jsou:
Pro vytvoření profilu letu ze souboru procedurálních kroků (syntéza dráhy letu) se segmenty tvoří postupně, aby byly dosaženy požadované podmínky v koncových bodech. Parametry koncového bodu každého segmentu se stávají parametry výchozího bodu následujícího segmentu. Při výpočtu každého segmentu jsou známy parametry na jeho počátku; požadované podmínky na jeho konci se stanoví podle procedurálních kroků. Kroky samotné jsou definovány standardy hlučnosti a výkonnosti letadel nebo je určí uživatel (např. z letových příruček letadel). Koncovými podmínkami jsou obvykle výška a rychlost; úkolem tvorby profilu je určit vzdálenost na trati, kterou letadlo uletí při dosahování těchto podmínek. Nedefinované parametry se určí prostřednictvím výpočtů provedení letu, které jsou popsány v dodatku B. Je-li průmět dráhy na zemský povrch přímý, je možné body profilu a související letové parametry určit nezávisle na průmětu dráhy na zemský povrch (úhel příčného náklonu je vždy nulový). Průměty dráhy na zemský povrch jsou však jen zřídka přímé; obvykle obsahují zatáčky a pro dosažení nejlepších výsledků musí být tyto zatáčky zohledněny při určení dvojrozměrného profilu letu, kdy je nezbytné rozdělit segmenty profilu v uzlových bodech průmětu dráhy na zemský povrch tak, aby bylo možné zanést změny úhlu příčného náklonu. Délka následujícího segmentu zpravidla zpočátku není známa a vypočítá se prozatímně, přičemž se předpokládá, že úhel příčného náklonu se nezmění. Pokud se následně zjistí, že tento prozatímní segment se prostírá na jednom nebo více uzlových bodech průmětu dráhy na zemský povrch, přičemž první z nich se nachází v s, konkrétně s1s < < s2 , segment se v s ukončí a tamní parametry se vypočítají pomocí interpolace (viz dále). Tyto parametry se stávají parametry koncového bodu stávajícího segmentu a parametry výchozího bodu nového segmentu – který má na konci stále stejné cílové podmínky. Pokud neexistuje žádný uzlový bod, který by zasahoval do průmětu dráhy na zemský povrch, prozatímní segment se potvrdí. Mají-li být vlivy zatáček na profil letu ignorovány, použije se řešení přímého letu, jediného segmentu, avšak údaj o úhlu příčného náklonu se ponechá pro následné použití. Bez ohledu na to, zda jsou v plném rozsahu modelovány vlivy zatáček, či nikoli, je každá trojrozměrná dráha letu tvořena sloučením dvojrozměrného profilu letu s dvojrozměrným průmětem jeho dráhy na zemský povrch. Výsledkem je sled souborů souřadnic (x, y, z), z nichž každá představuje uzlový bod segmentovaného průmětu dráhy na zemský povrch, uzlový bod profilu letu nebo obojí, přičemž u bodů profilu jsou uvedeny odpovídající hodnoty výšky z, traťové rychlosti V, úhlu příčného náklonu ε a výkonu motorů P. Pro bod dráhy (x, y), který leží mezi koncovými body segmentu profilu letu, se letové parametry interpolují takto:
kde
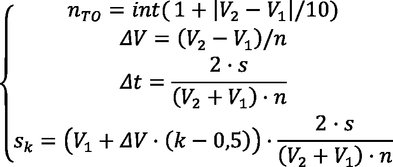
Povšimněte si, že u z a ε se předpokládá, že se mění lineárně se vzdáleností, avšak u V a P se předpokládá, že se mění lineárně s časem (konkrétně konstantní zrychlení (**)). Při přizpůsobování segmentů profilu letu podle radarových údajů (analýza dráhy letu) se všechny vzdálenosti a výšky koncových bodů a rychlosti a úhly příčného náklonu v těchto bodech určují přímo z těchto údajů; pouze nastavení výkonu motoru se musí vypočítat pomocí rovnic výkonnosti. Také průmět dráhy na zemský povrch a souřadnice profilu letu mohou být přizpůsobeny odpovídajícím způsobem, a je to tedy obvykle celkem jednoduché. Rozjezd při vzletu Při vzletu, kdy letadlo zrychluje mezi bodem uvolnění brzd (také nazývaným počátek rozjezdu (SOR)) a bodem odpoutání, dochází na úseku 1 500 až 2 500 m k prudké změně rychlosti z nuly až na přibližně 80 až 100 m/s. Rozjezd při vzletu se tak rozdělí na segmenty o rozdílné délce, přičemž v každém z nich se rychlost letadla mění o konkrétní přírůstek ΔV, který není větší než 10 m/s (přibližně 20 uzlů). Ačkoli se zrychlení během rozjezdu při vzletu ve skutečnosti mění, je pro tento účel přiměřený předpoklad konstantního zrychlení. V tomto případě ve fázi vzletu je V1 počáteční rychlost, V2 je rychlost při vzletu, nTO počet segmentů vzletu a sTO je ekvivalentní vzletová vzdálenost. Pro ekvivalentní vzletovou vzdálenost sTO (viz dodatek B), rychlost při vzletu V1 a rychlost při vzletu VTO je počet nTO segmentů rozjezdu
a tedy změna rychlosti podél segmentu je
a čas Δt na každý segment (za předpokladu konstantního zrychlení) je
Délka sTO,k segmentu k (1 ≤ k ≤ nTO) rozjezdu při vzletu pak je:
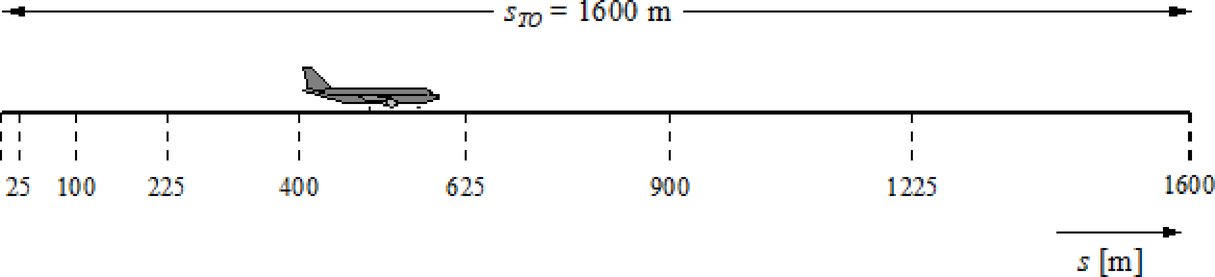
Příklad: Při vzletové vzdálenosti sTO = 1 600 m, V1 = 0 m/s a V2 = 75 m/s se získá nTO = 8 segmentů o délce v rozmezí 25 až 375 metrů (viz obrázek 2.7.g):
Podobně jako je tomu u změn rychlosti, také tah letadla se v každém segmentu mění o konstantní přírůstek ΔP, který se vypočte jako
kde PTO označuje tah letadla v bodě odpoutání a Pinit označuje tah letadla na počátku rozjezdu při vzletu. Důvodem pro použití tohoto konstantního přírůstku tahu (místo aby se použila kvadratická rovnice 2.7.6) je zajistit soulad s lineárním vztahem mezi tahem a rychlostí v případě letadel s proudovými motory. Důležité upozornění: Výše uvedené rovnice a příklady implicitně předpokládají, že bude počáteční rychlost letadla na začátku vzletové fáze nula. To odpovídá běžné situaci, kdy se letadla začínají rozjíždět a zrychlovat z bodu uvolnění brzd. Existují ovšem také situace, kdy může letadlo začít zrychlovat ze své pojížděcí rychlosti, aniž by zastavilo na kraji dráhy. V takovém případě nenulové počáteční rychlosti Vinit je nutné použít namísto rovnic 2.7.8, 2.7.9 následující „zobecněné“ rovnice: 2.7.10 a 2.7.11.
V tomto případě je pro fázi vzletu V1 počáteční rychlostí Vinit , V2 je vzletovou rychlostí VTO , n je počet segmentů vzletu nTO , s je ekvivalent vzletové vzdálenosti sTO a sk je délka sTO,k segmentu k (1[symbol]k[symbol]n). Dojezd při přistání Ačkoli je dojezd při přistání v zásadě obrácený postup než rozjezd při vzletu, je třeba věnovat zvláštní pozornost
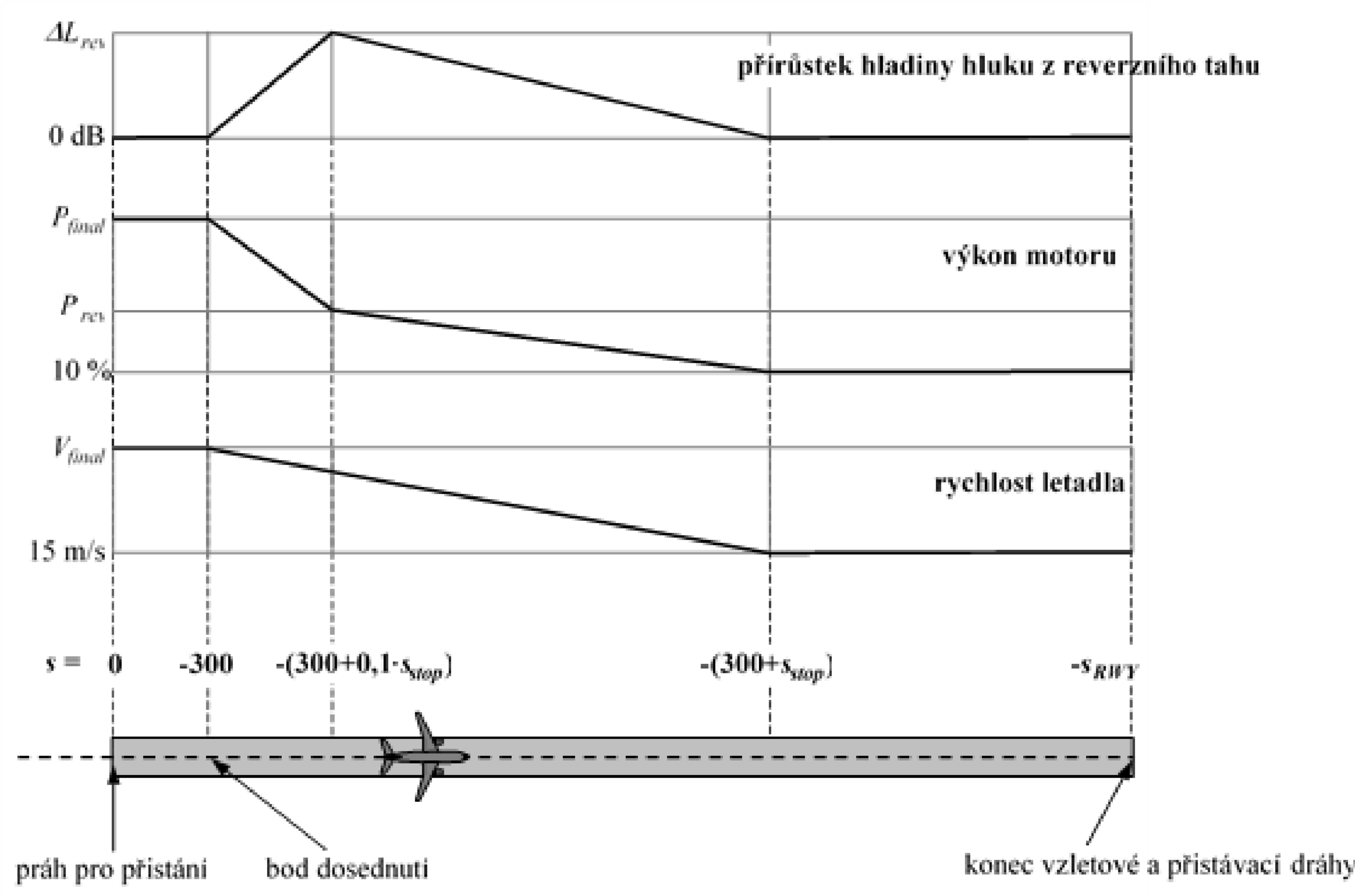
Na rozdíl od délky rozjezdu při vzletu, která je odvozena od parametrů výkonnosti letadla, délka zastavení sstop (vzdálenost od bodu dosednutí do bodu, v němž letadlo opustí vzletovou a přistávací dráhu) nezávisí pouze na konkrétním letadle. Minimální délku rozjezdu lze sice odhadnout na základě hmotnosti a výkonnosti letadla (a dostupného reverzního tahu), ale skutečná délka zastavení závisí také na poloze pojezdových drah, na provozní situaci a na předpisech příslušného letiště upravujících použití reverzního tahu. Použití reverzního tahu není standardní postup – používá se pouze tehdy, jestliže potřebného zpomalení není možné dosáhnout použitím kolových brzd. (Reverzní tah může být mimořádně rušivý, neboť rychlá změna výkonu motoru z volného chodu na zpětný chod vyvolává náhlý a intenzivní hlukový impulz.) Většina vzletových a přistávacích drah se však používá pro odlety i pro přistání, a reverzní tah má tedy na izofony velmi malý vliv, protože v celkové zvukové energii v blízkosti vzletové a přistávací dráhy převažuje hluk vznikající při vzletech. Příspěvky reverzního tahu k izofonám mohou být významné jen tehdy, je-li dráha vyhrazena pouze pro přistávání. Z fyzikálního hlediska je hluk reverzního tahu velmi složitý proces, ale vzhledem k jeho relativně menšímu významu pro izofony leteckého hluku může být modelován zjednodušeně – rychlá změna výkonu motoru se zohlední prostřednictvím vhodné segmentace. Je jasné, že modelování dojezdu při přistání je složitější než modelování hluku rozjezdu při vzletu. Nejsou-li k dispozici podrobnější informace, pro běžné použití se doporučuje použít následující předpoklady pro zjednodušené modelování (viz obrázek 2.7.h.1).
Letadlo přelétává práh pro přistání (který má na průmětu dráhy přiblížení na zemský povrch souřadnici s = 0) ve výšce 50 stop a pak dál klesá po sestupové dráze, dokud nedosedne na zem. Pro úhel sestupové roviny 3° se bod dosednutí nachází 291 m za prahem pro přistání (jak je vidět na obrázku 2.7.h.1). Poté letadlo zpomaluje po celé délce zastavení sstop – letadlo, pro které jsou konkrétní hodnoty uvedeny v databázi údajů o hlučnosti a charakteristikách letadel – z rychlosti konečného přiblížení Vfinal na 15 m/s. Vzhledem k rychlým změnám rychlosti během tohoto segmentu je třeba provést další segmentaci tohoto segmentu, a to stejným způsobem jako v případě rozjezdu při vzletu (nebo v případě vzdušných segmentů s rychlými změnami rychlosti), pomocí zobecněných rovnic 2.7.13 (jelikož rychlost pojíždění se nerovná nule). Výkon motoru se mění od výkonu při konečném přiblížení v bodě dosednutí až k nastavení výkonu reverzního tahu Prev na úseku o délce 0,1•sstop , poté se sníží na 10 % maximálního dostupného výkonu na zbývajícím úseku o délce 90 % délky zastavení. Až do konce vzletové/přistávací dráhy (při s = –s RWY) zůstává rychlost letadla konstantní. Křivky závislosti NPD pro reverzní tah databáze údajů o hlučnosti a charakteristikách letadel v současnosti neobsahuje, a pro modelování tohoto vlivu je proto nezbytné vycházet z konvenčních křivek. Typicky výkon reverzního tahu Prev představuje přibližně 20 % nastavení plného výkonu a doporučuje se použít tuto hodnotu, pokud nejsou k dispozici žádné provozní informace. Při daném nastavení výkonu však reverzní tah většinou způsobuje podstatně větší hluk než tah vpřed a k hladině hlukové události odvozené z údajů NPD se musí uplatnit přírůstek ΔL, který se zvyšuje od nuly až po hodnotu ΔLrev (prozatím se doporučuje stanovit ji na 5 dB (***)) na úseku 0,1•sstop a poté po zbylou část délky zastavení lineárně klesá až na nulu. Segmentace segmentu počátečního stoupání a segmentu konečného přiblížení Geometrie mezi segmentem a bodem příjmu se v segmentech počátečního stoupání a konečného přiblížení zejména vzhledem k pozicím pozorovatele po straně letové dráhy rychle mění, přičemž se při stoupání či klesání letadla v tomto počátečním/konečném segmentu rovněž rychle mění výškový úhel (úhel beta). Ze srovnání s výpočty velmi malých segmentů vyplývá, že v případě jediného vzdušného segmentu (nebo jejich omezeného počtu) stoupání nebo přiblížení pod určitou výškou (vzhledem k dráze) dochází k nedostatečné aproximaci zvuku po stranách dráhy letu pro integrované systémy měření. To je způsobeno aplikací jediné úpravy bočního útlumu jednotlivých segmentů, což odpovídá hodnotě výškového úhlu u jednoho konkrétního segmentu, zatímco výsledkem rychlé změny tohoto parametru jsou významné odchylky bočního útlumu podél jednotlivých segmentů. Přesnost výpočtu zlepšuje dílčí segmentace vzdušných segmentů počátečního stoupání a závěrečného přiblížení. Počet dílčích segmentů a jejich délka určují „granularitu“ změny bočního útlumu, která bude zohledněna. S ohledem na vyjádření celkového bočního útlumu u letadel s motory umístěnými na trupu lze uvést, že pro mezní změnu bočního útlumu o 1,5 dB v každém dílčím segmentu musí být segmenty stoupání a přiblížení nacházející se pod výškou 1 289,6 m (4 231 ft) nad dráhou dále segmentovány na základě následujícího souboru hodnot výšky:
U každého původního segmentu pod 1 289,6 m (4 231 ft) se výše uvedené výšky použijí tak, že se stanoví, která výška z výše uvedeného souboru je nejbližší původní výšce koncového bodu (u segmentu stoupání) nebo výšce počátečního bodu (u segmentu přiblížení). Skutečné výšky dílčích segmentů, zi, by pak byly vypočítány pomocí vzorce:
kde:
Příklad segmentu počátečního stoupání: Je-li výška koncového bodu původního segmentu ze = 304,8 m, pak ze souboru hodnot výšek zjistíme, že 214,9 m < ze < 334,9 m a výška ze souboru výšek nejbližší k ze je z’7 = 334,9 m. Výška koncových bodů dílčích segmentů se pak vypočítá takto:
(všimněte si, že v tomto případě k =1, protože se jedná o segment počátečního stoupání) Tedy z1 by byla 17,2 m a z2 by byla 37,8 m atd. Segmentace vzdušných segmentů V případě vzdušných segmentů, kdy v rámci segmentu dochází ke značné změně rychlosti, musí být tento segment dále rozdělen, stejně jako je tomu u rozjezdu nebo dojezdu, konkrétně:
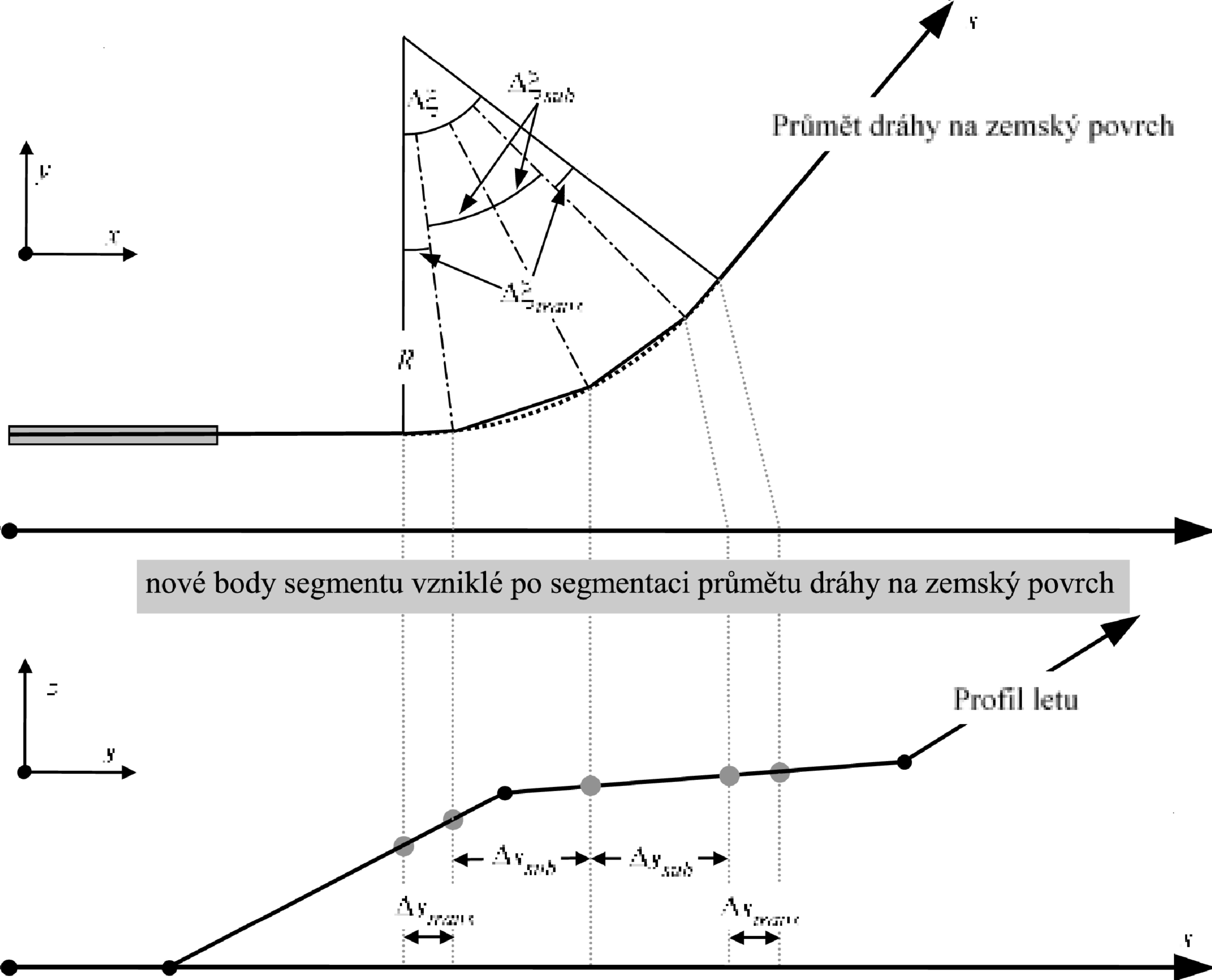
kde V1 je rychlost na počátku segmentu a V2 je rychlost na konci segmentu. Odpovídající parametry dílčích segmentů se vypočítají podobně jako v případě rozjezdu na zemi pomocí rovnic 2.7.9 až 2.7.11. Průmět dráhy na zemský povrch Průmět dráhy na zemský povrch, ať se jedná o průmět střední dráhy, nebo rozptýlených dílčích drah, je určen řadou souřadnic (x, y) na zemském povrchu (získaných například z radarových informací) nebo sledem vektorových příkazů popisujících přímé segmenty a oblouky kružnice (zatáčky se stanoveným poloměrem r a změnou kurzu Δξ). Pro modelování segmentace je oblouk zobrazen sledem přímých segmentů zasazených do dílčích oblouků. V segmentech průmětu dráhy na zemský povrch se sice výslovně nevyskytují, ale náklony letadla při zatáčkách ovlivňují jejich definici. Dodatek B4 objasňuje, jak vypočítat úhly příčného náklonu při rovnoměrné zatáčce, ale tyto úhly se samozřejmě ve skutečnosti neuplatňují nebo okamžitě mizí. Jak postupovat v případě přechodů mezi přímým letem a letem v zatáčce nebo mezi jednou zatáčkou a druhou, bezprostředně na ni navazující, stanoveno není. Podrobnosti, které jsou ponechány na uživateli (viz oddíl 2.7.11), obvykle mohou mít na konečné izofony jen zanedbatelný vliv; hlavně je požadováno, aby se zamezilo ostrým přerušením na konci zatáček, čehož lze dosáhnout jednoduše například vložením krátkých přechodových segmentů, v nichž se úhel příčného náklonu mění lineárně se vzdáleností. Pouze ve zvláštním případě, kdy konkrétní zatáčka může mít převažující vliv na výsledné izofony, by bylo nezbytné modelovat dynamiku přechodu reálněji, vztáhnout úhel příčného náklonu ke konkrétním typům letadla a přijmout odpovídající rychlosti změny příčného náklonu. Zde stačí uvést, že koncové dílčí oblouky Δξtrans v jakékoli zatáčce vyplývají z požadavků na změnu úhlu příčného náklonu. Zbývající část oblouku se změnou kurzu Δξ – 2·Δξtrans stupňů se rozdělí na nsub podoblouků podle rovnice:
kde int(x) je funkce, která dává celé číslo x. Změna kurzu Δξ sub v každém z půloblouků se pak vypočítá jako
kde nsub musí být dostatečně velké, aby se zajistilo, že Δξ sub ≤ 10 stupňů. Segmentace oblouku (s výjimkou ukončujících dílčích přechodových segmentů) je znázorněna na obrázku 2.7.h.2 (****).
Jakmile se v rovině x–y vytvoří segmenty průmětu dráhy na zemský povrch, umístí se přes ně segmenty profilu letu (v rovině s–z), čímž vzniknou trojrozměrné segmenty dráhy (x, y, z). Průmět dráhy na zemský povrch by měl vždy sahat od vzletové dráhy za vypočtenou souřadnicovou síť. Toho lze v případě potřeby dosáhnout přidáním přímého segmentu o vhodné délce za poslední segment průmětu dráhy na zemský povrch. Celková délka profilu letu musí po spojení s průmětem dráhy na zemský povrch rovněž sahat od vzletové dráhy za vypočtenou souřadnicovou síť. Toho lze v případě nutnosti dosáhnout přidáním zvláštního bodu profilu:
Korekce segmentace vzdušných segmentů Po odvození 3D segmentů dráhy letu postupem uvedeným v oddíle 2.7.13 mohou být nutné další korekce segmentace, kterými se odstraní body dráhy letu, jež se nachází příliš blízko u sebe. Jsou-li sousední body od sebe vzdáleny 10 metrů a méně a související rychlosti a tahy motoru jsou stejné, měl by být jeden z těchto bodů odstraněn. (*) Za tímto účelem by celková délka průmětu dráhy na zemský povrch měla být vždy větší než délka profilu letu. Toho lze v případě potřeby dosáhnout přidáním přímých segmentů o vhodné délce za poslední segment průmětu dráhy na zemský povrch." (**) Dokonce i když nastavení výkonu motoru zůstává v celém segmentu konstantní, hnací síla a zrychlení se mohou měnit v důsledku různé hustoty vzduchu v různých výškách. Pro účely hlukového modelování jsou však tyto změny obvykle zanedbatelné." (***) Tato hodnota byla doporučena v předchozím vydání dokumentu organizace ECAC č. 29, avšak je stále považována za prozatímní, dokud nebudou získány další podpůrné experimentální údaje." (****) Celková délka segmentované dráhy, definovaná takto jednoduše, je poněkud kratší než celková délka kruhové dráhy. Následná chyba v hodnotě izofony je však zanedbatelná, pokud jsou úhlové přírůstky menší než 30°.“" |
|
14) |
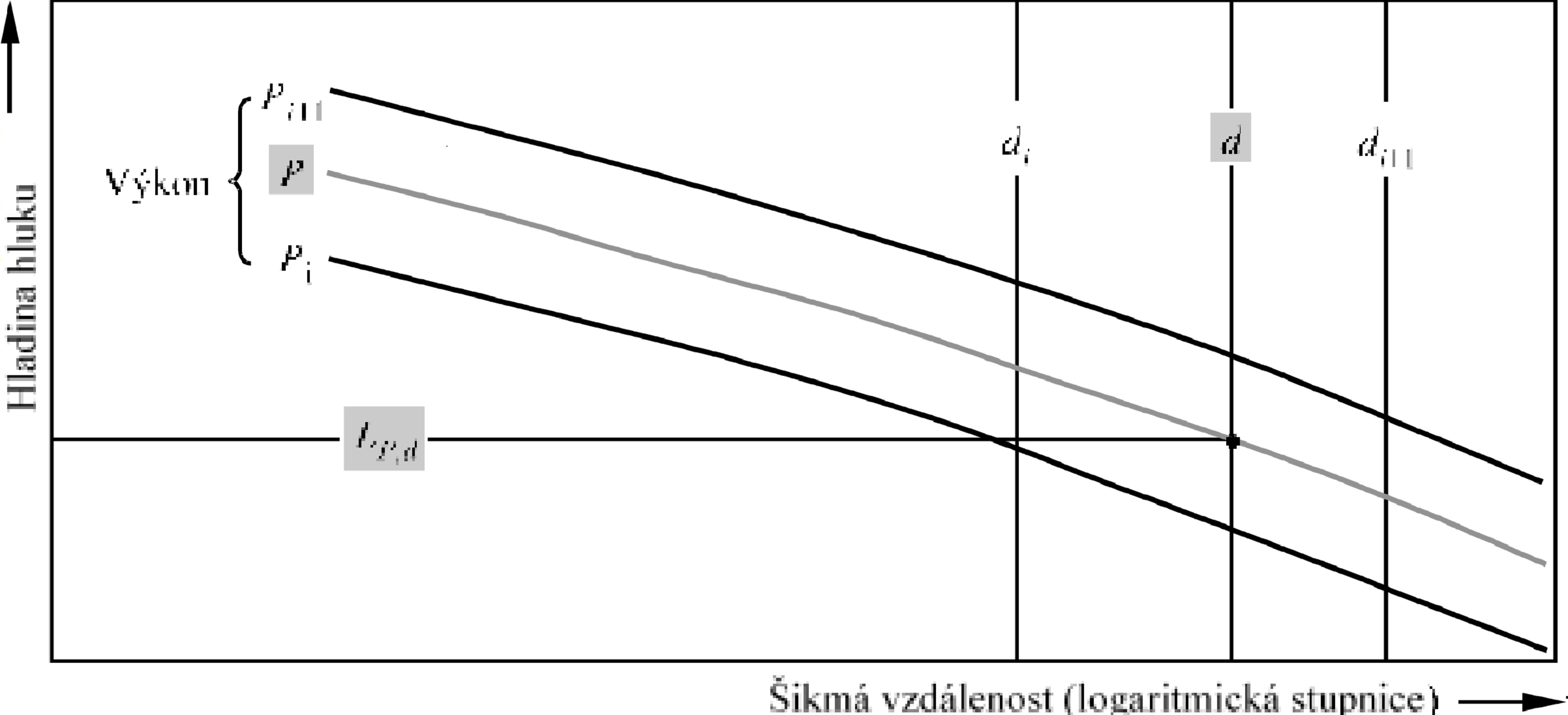
Oddíl 2.7.16 „Určení hladin hlukových událostí z údajů NPD“ se nahrazuje tímto: „2.7.16 Určení hladin hlukových událostí z údajů NPD Hlavním zdrojem údajů o leteckém hluku je mezinárodní databáze údajů o hlučnosti a charakteristikách letadel (ANP). Obsahuje v tabulkách Lmax a LE jako funkce vzdálenosti šíření hluku d – pro konkrétní typy a varianty letadel, letové konfigurace (přiblížení, odlet, nastavení vztlakových klapek) a nastavení výkonu P. Tyto hodnoty se vztahují k rovnoměrnému letu konkrétními referenčními rychlostmi Vref po pomyslné nekonečné, přímé dráze letu (*). To, jak se stanoví hodnoty nezávislých proměnných P a d, je popsáno dále. Při jediném hledání, se vstupními hodnotami P a d, jsou požadovanými výstupními hodnotami základní hladiny Lmax(P,d) a/nebo LE ∞(P,d) (použitelné na nekonečnou dráhu letu). Pokud se stane, že hodnoty pro P a/nebo d nejsou v tabulce uvedeny přesně, bude zpravidla nezbytné odhadnout požadovanou hladinu (hladiny) hluku hlukové události pomocí interpolace. Použije se lineární interpolace mezi nastaveními výkonu uvedenými v tabulce a logaritmická interpolace mezi vzdálenostmi v tabulce (viz obrázek 2.7.i).
Jsou-li Pi a Pi + 1 hodnoty výkonu motoru, pro které jsou v tabulkách uvedeny údaje o hladině hluku oproti údajům o vzdálenosti, hladina hluku L(P) v dané vzdálenosti pro mezilehlý výkon P, mezi Pi a Pi + 1, je dána tímto:
Jestliže při jakémkoli nastavení výkonu jsou di a di + 1 vzdálenosti, pro které jsou v tabulce uvedeny hlukové údaje, hladina hluku L(d) pro mezilehlou vzdálenost d, mezi di a di + 1, je dána jako
Pomocí rovnic (2.7.19) a (2.7.20) lze získat hladinu hluku L(P,d) pro jakékoli nastavení výkonu P a jakoukoli vzdálenost d, která se nachází v obálce databáze NPD. Pro vzdálenosti d, které se nacházejí mimo obálku NPD, se použije rovnice 2.7.20 pro extrapolaci z posledních dvou hodnot, konkrétně směrem dovnitř z L(d1) a L(d2) nebo směrem ven z L(dI –1) a L(dI), kde I je celkový počet bodů NPD na křivce. A tedy: směrem dovnitř:
směrem ven:
Jelikož na krátké vzdálenosti d se hladiny hluku zvyšují velmi rychle s klesající vzdáleností šíření, doporučuje se pro d stanovit spodní hranici 30 m, konkrétně d = max(d, 30 m). Impedanční korekce standardních údajů NPD Údaje NPD uvedené v databázi údajů o hlučnosti a charakteristikách letadel jsou normalizovány na referenční atmosférické podmínky (teplota 25 °C a tlak 101,325 kPa). Před použitím metody interpolace/extrapolace, která byla popsána výše, se musí provést korekce těchto standardních údajů NPD o akustickou impedanci. Akustická impedance souvisí se šířením zvukových vln v akustickém prostředí a je definována jako součin hustoty vzduchu a rychlosti zvuku. Pro danou intenzitu zvuku (výkon na jednotku plochy) vnímanou v konkrétní vzdálenosti od zdroje závisí související akustický tlak (používaný pro definici měr SEL a LAmax) na akustické impedanci vzduchu v místě měření. Je to funkce teploty, atmosférického tlaku (a nepřímo nadmořské výšky). Proto je zapotřebí korigovat standardní údaje NPD z databáze ANP, aby se zohlednily skutečné teplotní a tlakové podmínky v bodě příjmu, které jsou zpravidla odlišné od normalizovaných podmínek údajů ANP. Impedanční korekce, kterou je třeba provést u standardních hladin NPD, se vyjadřuje takto:
kde:
Impedance ρ·c se vypočte takto:
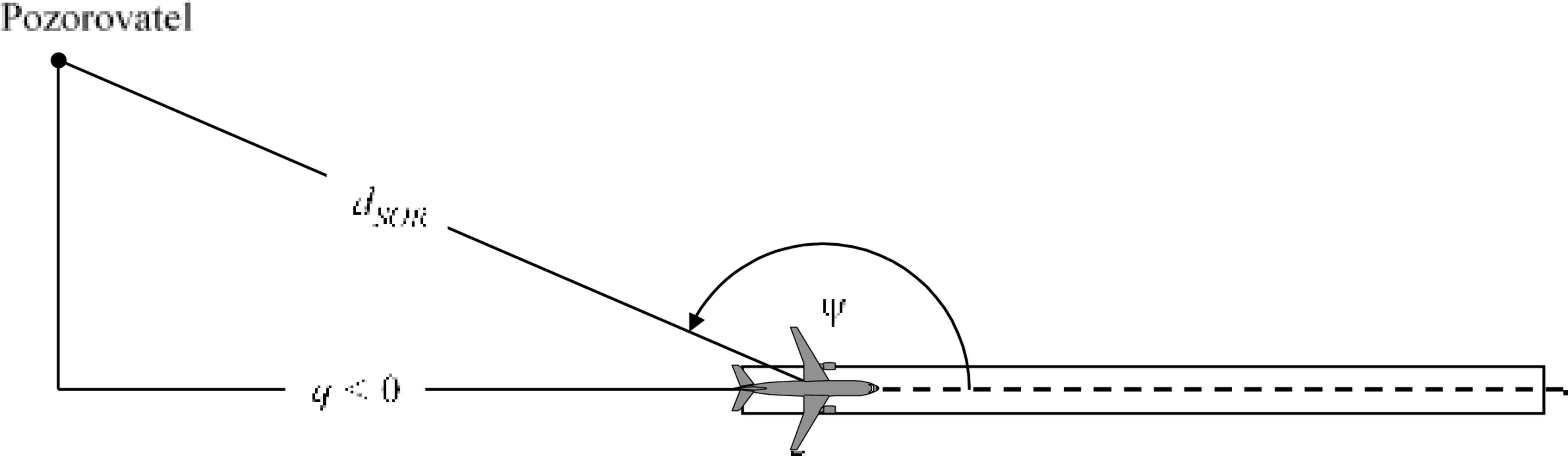
Korekce o akustickou impedanci je obvykle menší než několik málo desetin jednoho dB. Zejména by mělo být připomenuto, že za standardních atmosférických podmínek (p0 = 101,325 kPa a T0 = 15,0 °C) je impedanční korekce menší než 0,1 dB (0,074 dB). Pokud však existují významné rozdíly teploty a atmosférického tlaku oproti referenčním atmosférickým podmínkám údajů NPD, může být korekce podstatnější.“ (*) Ačkoli pojem nekonečně dlouhé dráhy letu je pro stanovení hladiny expozice akustického tlaku hlukové události LE důležitý, má menší význam v případě maximální hladiny hlukové události Lmax, která je určována hlukem vyvolaným letadlem, když je v určité konkrétní poloze v nejbližším bodě nebo blízko nejbližšího bodu přiblížení k pozorovateli. Pro účely modelování se má za to, že parametr vztahů mezi hlukem, výkonem letadla a vzdáleností od letadla je minimální vzdálenost mezi pozorovatelem a segmentem.“" |



|
15) |
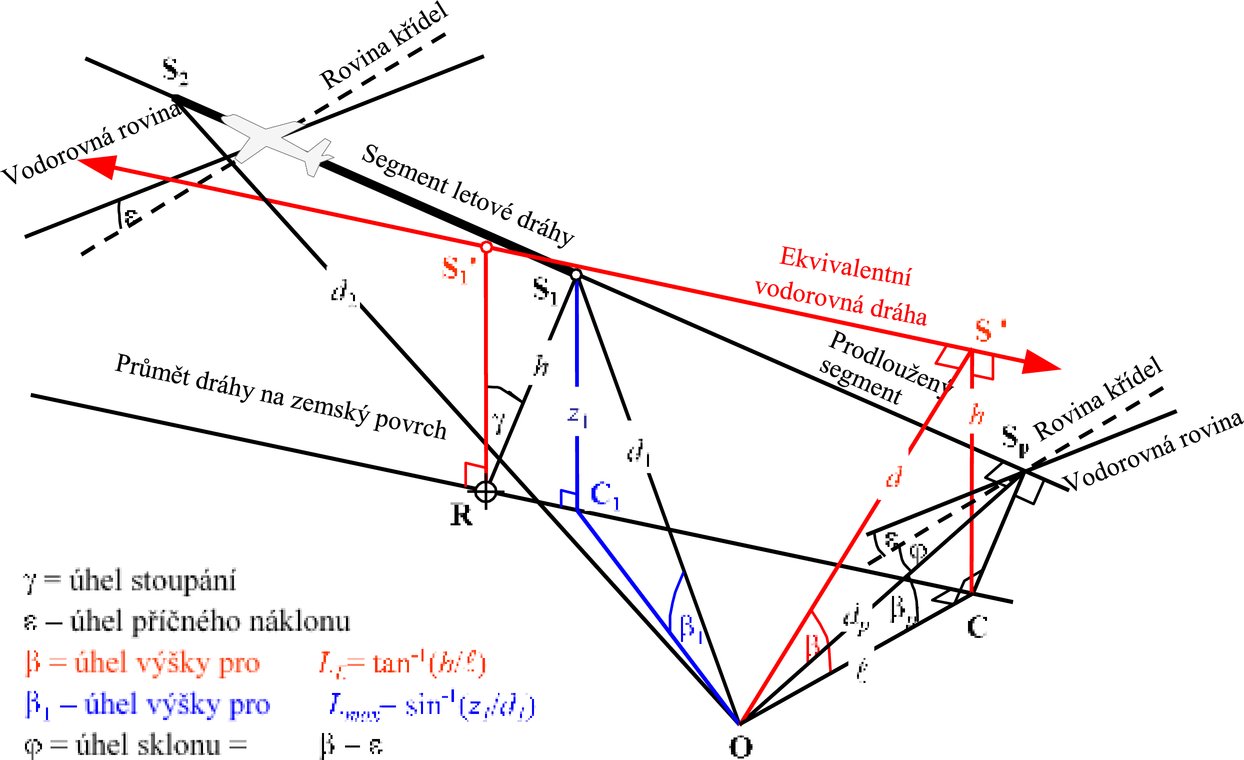
V oddíle 2.7.18 „Parametry segmentů dráhy letu“ se odstavec pod nadpisem „Výkon P segmentu“ nahrazuje tímto: „Výkon P segmentu Údaje NPD uvedené v tabulkách popisují hluk letadla při rovnoměrném přímém letu po nekonečné dráze letu, tedy při konstantním výkonu motorů P. Doporučená metodika rozděluje aktuální dráhy letu, na nichž existují rozdíly v rychlosti a směru, na určitý počet konečných segmentů, z nichž každý je pak považován za součást jednotné, nekonečné dráhy letu, pro kterou údaje NPD jsou validní. Metodika však stanoví změny výkonu v celé délce segmentu; má se za to, že se mění kvadraticky se vzdáleností z P1 na počátku segmentu na P2 na jeho konci. Je proto nezbytné definovat ekvivalentní stálou hodnotu segmentu P. Za tu je považována hodnota v tom bodě segmentu, který je nejbližší ve vztahu k pozorovateli. Je-li pozorovatel vedle segmentu (obrázek 2.7.k), získá se interpolací, vyjádřenou pomocí rovnice 2.7.8, mezi koncovými hodnotami, konkrétně
Je-li pozorovatel za segmentem nebo před ním, je to hodnota v nejbližším koncovém bodě, P1 nebo P2 .“ |
|
16) |
Oddíl 2.7.19 se mění takto
|

 ;
; 



|
17) |
Oddíl 2.8 se nahrazuje tímto: „2.8 Expozice hluku Určení oblasti vystavené hluku Posouzení oblasti vystavené hluku vychází z bodů posouzení hluku ve výšce 4 ± 0,2 m nad zemí, což odpovídá umístění bodů příjmu podle 2.5, 2.6 a 2.7, vypočítáno na souřadnicové síti pro jednotlivé zdroje. K bodům souřadnicové sítě nacházejícím se uvnitř budov se přiřadí výsledky hladiny hluku pomocí přiřazení nejtišších sousedních bodů příjmu vně budov, a to kromě hluku z letadel, u nichž se výpočet provede bez zohlednění přítomnosti budov a kdy se přímo použije bod příjmu hluku v rámci budovy. Podle rozlišení souřadnicové sítě bude ke každému jejímu bodu pro výpočet přiřazena příslušná oblast. Například u souřadnicové sítě 10 m x 10 m představují jednotlivé body hodnocení plochu 100 čtverečních metrů, která je vystavena počítané hladině hluku. Přiřazení bodů hodnocení hluku k budovám bez obytných jednotek Hodnocení expozice hluku u budov bez obytných jednotek, jako jsou školy a nemocnice, vychází z bodů hodnocení hluku ve výšce 4 ± 0,2 m nad zemí, což odpovídá bodům příjmu definovaným v 2.5, 2.6 a 2.7 Při hodnocení budov bez bytových jednotek a vystavených hluku z letadel se ke každé budově přiřadí bod příjmu s nejvyšším hlukem v rámci budovy samotné, nebo pokud takový bod neexistuje, pak bod na souřadnicové síti kolem budovy. Při hodnocení budov bez bytových jednotek a vystavených pozemním zdrojům hluku se body příjmu nacházejí přibližně 0,1 m před fasádou budovy. Z výpočtu se vyloučí odrazy od posuzované fasády. Budově se pak přiřadí nejhlučnější bod příjmu na její fasádě. Stanovení obytných jednotek a obyvatel obytných jednotek vystavených hluku Pro hodnocení expozice obytných jednotek a obyvatel obytných jednotek hluku se musí posuzovat pouze obytné budovy. Nelze přidělovat žádné obytné jednotky nebo osoby do jiných budov, které nejsou využívány k bydlení, jako jsou budovy sloužící výhradně jako školy, nemocnice, kancelářské budovy nebo továrny. Přidělení obytných jednotek a obyvatel obytných jednotek k obytným budovám musí být založeno na posledních úředních údajích (podle příslušných předpisů daného členského státu). Počet obytných jednotek a v nich žijících osob v obytných budovách jsou důležitými pomocnými parametry pro odhad expozice hluku. Údaje pro tyto parametry však bohužel nejsou vždy dostupné. Níže je vysvětleno, jak lze tyto parametry odvodit z údajů, které jsou snáze dostupné. V následujícím textu jsou použity tyto symboly: BA = základní plocha budovy DFS = obytná podlahová plocha DUFS = podlahová plocha obytné jednotky H = výška budovy FSI = obytná podlahová plocha na jednu osobu žijící v obytné jednotce Dw = počet obytných jednotek Inh = počet osob žijících v obytných jednotkách NF = počet podlaží V = objem obytných budov Pro výpočet počtu obytných jednotek a v nich žijících osob se musí použít postup uvedený v případě 1 nebo postup uvedený v případě 2 podle toho, které údaje jsou dostupné. Případ 1: Je k dispozici údaj o počtu obytných jednotek a v nich žijících osob 1A: Počet osob žijících v obytných jednotkách je znám nebo byl odhadnut na základě počtu obytných jednotek. V tomto případě je počet osob žijících v obytných jednotkách budovy součtem počtu osob žijících ve všech obytných jednotkách v budově.
1B: Počet obytných jednotek nebo jejich obyvatel je znám pouze pro jednotky větší než budova, například vypočítané oblasti, městské bloky, městské čtvrti, nebo dokonce celá obec. V tomto případě se počet obytných jednotek a osob žijících v obytných jednotkách budovy odhadne na základě objemu budovy:
Index „total“ se vztahuje na příslušnou dotčenou jednotku. Objem budovy je součin její základní plochy a její výšky:
Není-li výška budovy známa, musí se odhadnout na základě počtu poschodí NFbuilding , přičemž se předpokládá, že průměrná výška jednoho poschodí je 3 m:
Není-li znám ani počet poschodí, musí se použít standardní hodnota pro počet poschodí, jež je reprezentativní pro danou městskou čtvrť nebo městskou část. Celkový objem obytných budov v rámci dotčené jednotky Vtotal se vypočte jako součet objemů všech obytných budov v dané jednotce: (2.8.5)
Případ 2: Nejsou k dispozici údaje o počtu osob žijících v obytných jednotkách V tomto případě se počet osob žijících v obytných jednotkách odhadne na základě průměrné obytné podlahové plochy na jednu osobu žijící v obytné jednotce FSI. Není-li tento parametr znám, musí se použít standardní hodnota. 2A: Obytná podlahová plocha je známa na základě obytných jednotek. V tomto případě se počet osob žijících v každé obytné jednotce odhadne takto:
Celkový počet osob žijících v obytných jednotkách budovy lze nyní odhadnout stejně jako v případě 1A. 2B: Je známa obytná podlahová plocha celé budovy, tedy je znám součet obytných podlahových ploch všech obytných jednotek v budově. V tomto případě se počet osob žijících v obytných jednotkách odhadne takto:
2C: Obytná podlahová plocha je známa pouze pro jednotky větší než budova, například vypočítané oblasti, městské bloky, městské čtvrti, nebo dokonce celou obec. V tomto případě se počet osob žijících v obytných jednotkách budovy odhadne na základě objemu budovy, jak je popsáno v případě 1B, uvedeném výše, přičemž se celkový počet osob žijících v obytných jednotkách odhadne takto:
2D: Obytná podlahová plocha není známa. V tomto případě se počet osob žijících v obytných jednotkách budovy odhadne tak, jak je popsáno výše v případě 2B, přičemž obytná podlahová plocha se odhadne takto: (2.9.8)
Faktor 0,8 je přepočítávací faktor hrubá podlahová plocha → obytná podlahová plocha. Je-li známo, že pro danou oblast je reprezentativní jiný faktor, musí být použit a jasně zdokumentován. Není-li znám počet poschodí v dané budově, musí se odhadnout na základě výšky budovy, Hbuilding , což typicky vede k počtu poschodí vyjádřenému desetinným číslem:
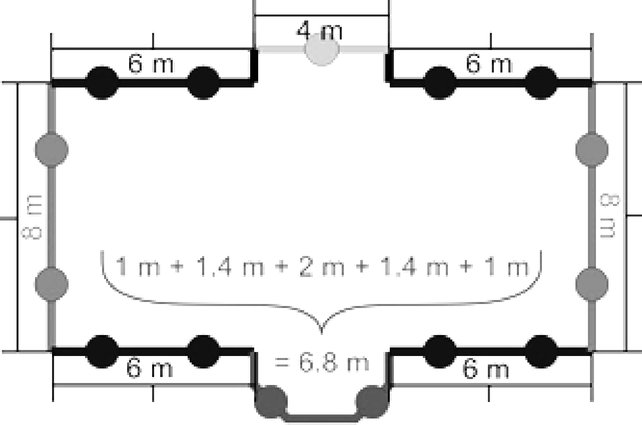
Není-li známa ani výška budovy, ani počet poschodí, musí se použít standardní hodnota pro počet poschodí reprezentativní pro danou městskou čtvrť nebo městskou část. Přiřazení bodů hodnocení hluku obytným jednotkám a osobám žijícím v obytných jednotkách Hodnocení expozice hluku u obytných jednotek a osob žijících v nich vychází z bodů hodnocení hluku ve výšce 4 ± 0,2 m nad zemí, což odpovídá bodům příjmu definovaným v oddílech 2.5, 2.6 a 2.7. Pro výpočet počtu bytových jednotek a osob žijících v nich vystavených hluku z letadel bude všem obytným jednotkám a osobám žijícím v nich přiřazen bod příjmu s nejvyšším hlukem náležející k dotčené budově, nebo pokud takový nebude existovat, pak k bodu nacházejícímu se na souřadnicové síti kolem budovy. Pro výpočet počtu bytových jednotek a osob žijících v nich vystavených pozemním zdrojům hluku se budou body příjmu nacházet přibližně 0,1 m před fasádou obytné budovy. Z výpočtu budou vyloučeny odrazy od posuzované fasády. Pro umístění bodů příjmu se použije buď postup podle případu 1, nebo postup podle případu 2. Případ 1: fasády se rozdělí v pravidelných intervalech
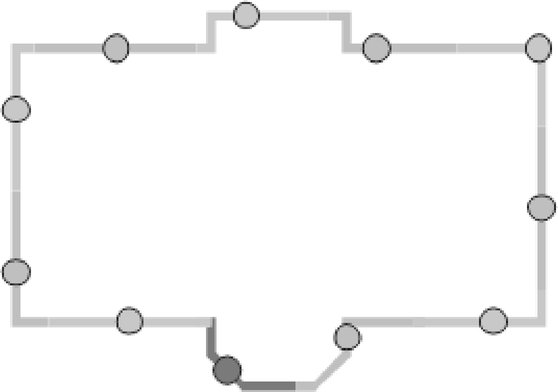
Případ 2: fasády se rozdělí ve stanovené vzdálenosti od začátku mnohoúhelníku
Přiřazení obytných jednotek a osob žijících v obytných jednotkách k bodům příjmu Budou-li k dispozici údaje o umístění obytných jednotek v rámci stop budovy, budou tyto obytné jednotky a osoby žijící v nich přiřazeny bodu příjmu na nejexponovanější fasádě této obytné jednotky. Například u samostatných domů, řadových domů a domů s terasami nebo bytových domů, kde je známo vnitřní rozdělení budovy, nebo u budov, jejichž podlahová plocha naznačuje jednu obytnou jednotku na podlaží, nebo u budov s podlahovou plochou a výškou naznačujících jednu obytnou jednotku na podlaží. Nebudou-li k dispozici výše uvedené údaje o umístění obytných jednotek v rámci stopy budovy, použije se pro odhad expozice hluku u obytných jednotek a osob žijících v nich v budově jeden z následujících postupů vhodný pro stavební základ budovy.
(*) Střední hodnota je hodnota oddělující horní polovinu (50 %) souboru údajů od spodní poloviny (50 %)." (**) Spodní polovina souboru údajů může být asimilována pomocí přítomnosti relativně tichých fasád. Bude-li předem známo, například podle umístění budov vzhledem k dominantním zdrojům hluku, u kterých umístění bodů příjmů se budou vyskytovat nejvyšší/nejnižší hladiny hluku, nebude nutné vypočítávat hluk pro spodní polovinu.“" |


|
18) |
Dodatek D se mění takto:
|
|
19) |
Dodatek F se mění takto:
|
|
20) |
Dodatek G se mění takto:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
21) |
Dodatek I se mění takto:
|
(*) Za tímto účelem by celková délka průmětu dráhy na zemský povrch měla být vždy větší než délka profilu letu. Toho lze v případě potřeby dosáhnout přidáním přímých segmentů o vhodné délce za poslední segment průmětu dráhy na zemský povrch.
(**) Dokonce i když nastavení výkonu motoru zůstává v celém segmentu konstantní, hnací síla a zrychlení se mohou měnit v důsledku různé hustoty vzduchu v různých výškách. Pro účely hlukového modelování jsou však tyto změny obvykle zanedbatelné.
(***) Tato hodnota byla doporučena v předchozím vydání dokumentu organizace ECAC č. 29, avšak je stále považována za prozatímní, dokud nebudou získány další podpůrné experimentální údaje.
(****) Celková délka segmentované dráhy, definovaná takto jednoduše, je poněkud kratší než celková délka kruhové dráhy. Následná chyba v hodnotě izofony je však zanedbatelná, pokud jsou úhlové přírůstky menší než 30°.“
(*) Ačkoli pojem nekonečně dlouhé dráhy letu je pro stanovení hladiny expozice akustického tlaku hlukové události LE důležitý, má menší význam v případě maximální hladiny hlukové události Lmax, která je určována hlukem vyvolaným letadlem, když je v určité konkrétní poloze v nejbližším bodě nebo blízko nejbližšího bodu přiblížení k pozorovateli. Pro účely modelování se má za to, že parametr vztahů mezi hlukem, výkonem letadla a vzdáleností od letadla je minimální vzdálenost mezi pozorovatelem a segmentem.“
(*) Toto se nazývá korekce doby trvání, protože zohledňuje vlivy rychlosti letadla na dobu trvání hlukové události – uplatnění jednoduchého předpokladu, že při ostatních stejných okolnostech je doba trvání, a tedy přijatá zvuková energie hlukové události, nepřímo úměrná rychlosti zdroje.“
(*) Střední hodnota je hodnota oddělující horní polovinu (50 %) souboru údajů od spodní poloviny (50 %).
(**) Spodní polovina souboru údajů může být asimilována pomocí přítomnosti relativně tichých fasád. Bude-li předem známo, například podle umístění budov vzhledem k dominantním zdrojům hluku, u kterých umístění bodů příjmů se budou vyskytovat nejvyšší/nejnižší hladiny hluku, nebude nutné vypočítávat hluk pro spodní polovinu.““